


パルス幅変調 (PWM) 技術
コンバータ、特にDC/ACインバータの出力電圧を管理するためのパワーエレクトロニクスの一般的な制御方法は、パルス幅変調 (PWM) です。PWMの基本コンセプトは、平均出力電圧を安定化するために出力パルス幅を調整することです。PWMを使用すると、固定DC入力電圧源は、可変周波数と振幅の正弦波出力波形を生成できます。
インバータのPWM方式は、VSIの出力電圧波形を細かく制御し、正確な電圧調整と電流調整を可能にします。これは、モータ駆動、再生可能エネルギーシステム、無停電電源装置 (UPS) など、最高の性能を得るために正確な電圧制御が必要な多くのアプリケーションに不可欠です。
PWMを使用することで、出力波形の高調波歪みを制御することもでき、最終的には電力品質の向上とシステム損失の低減につながります。基本的な方形波変調技術とは対照的に、インバータのPWMは、出力電圧、周波数、高調波での制御向上というメリットを提供します。
一般的なPWM方式と、それらがインバータの性能、高調波成分、および歪みに与える影響については、以下のセクションで単相インバータと三相インバータで説明します。
PWM技術の種類
PWMには、単相インバータ用のさまざまな形式があります。これらの巧妙に設計された手順では、潜在的な損傷を防ぐために、許容されるスイッチング状態のみでのインバータ動作を考慮しています。たとえば、ソースが短絡しないようにするために、VSIの同じ足にあるスイッチはオンになりません。フルブリッジ単相インバータの代表的なPWM方式を以下に示します。
シングルパルス幅変調
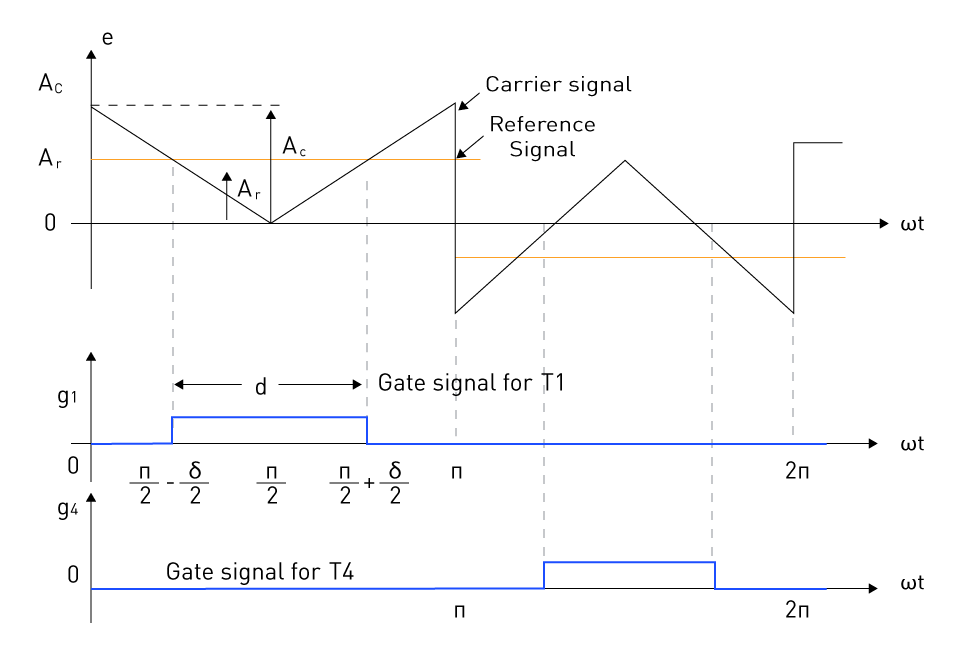
図24 : シングルパルス幅変調ゲート信号の生成
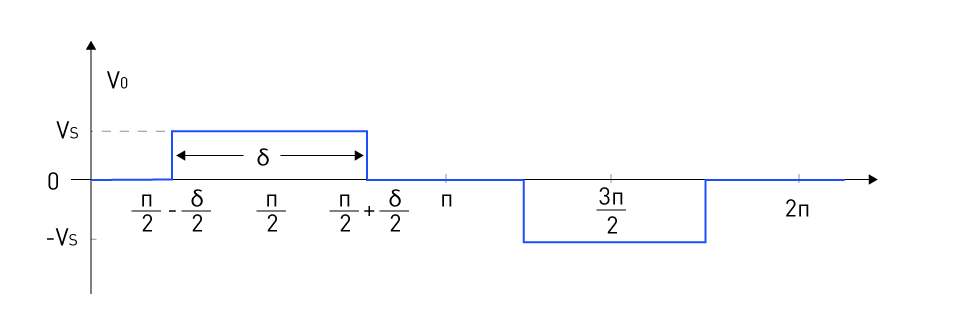
図25 : シングルパルス幅変調出力波形
図24は、シングルパルス幅変調を示しています。幅と位置を調整可能なゲートパルスの生成を含む、単純なPWMアプローチです。変調指数M (基準信号Arとキャリア信号Acの最大値の比) が変化すると、各半周期内のこのパルスの位置と幅も変化または変調します。
図25は、単相フルブリッジインバータを示しています。キャリア信号は基準信号と比較され、図24に示されるように、g1と呼ばれるスイッチT1 (およびT2)、g4と呼ばれるスイッチT3 (およびT4) 用のゲートパルスが生成されます。基準信号とキャリア信号の正の大きさがg1を決定し、g4はそれらの負の大きさによって決定されます。図25は結果としての出力電圧を示しています。
第3高調波はこのPWMで顕著です。歪み係数 (DF) は、基本成分に対する高調波の二乗平均平方根の比として定義され、二次減衰 (各高調波の2乗による割り算) があります。これは出力フィルタがより効果的に高調波を減衰させるという事実を考慮しています。DFはMが減少するにつれて増大し、出力電圧が低下することを意味します。最後に、Mの許容値は約0.8であり、DFが最小になります。
複数パルス幅変調
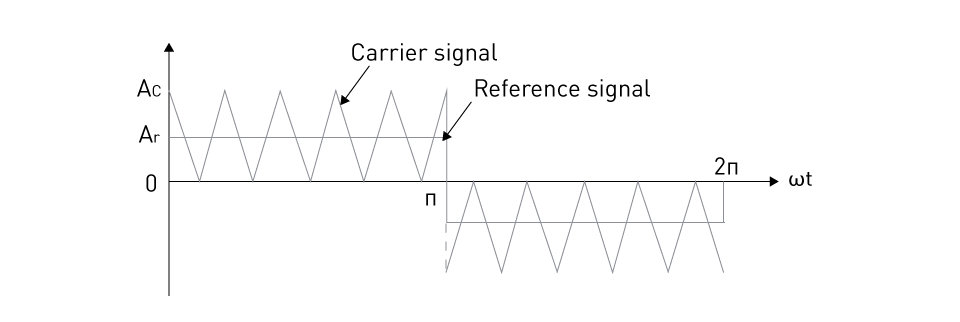
図26 : 複数パルス幅変調におけるゲート信号の生成
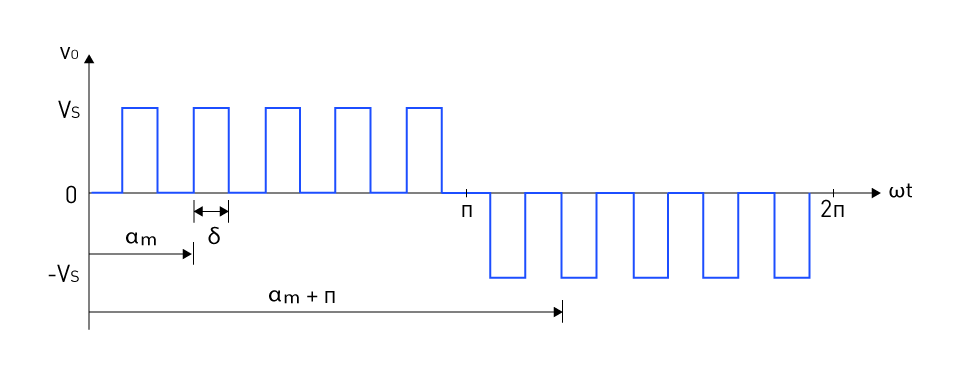
図27 : 複数パルス幅変調の出力電圧
出力高調波成分を下げるために、出力電圧の各半周期でパルス列を生成することができます。図26に示すように、基準信号を三角波キャリア信号と比較することで、いくつかのゲートパルスを生成できます。単一パルス幅変調と同様に、g1は単一正弦波の比較によって決定され、g4は180°の位相ずれとの比較によって決定されます。各半周期のパルス数はキャリア周波数によって決まります。さらに、基準信号の周波数は出力信号の周波数に影響を与えます。最後に、変調指数は出力RMS電圧を調整します。図27は出力電圧波形を示しています。
シングルパルス幅変調と比較すると、複数パルス幅変調のDFは大幅に低くなります。ただし、スイッチングサイクル数が増加するとスイッチング損失が増加します。
正弦波パルス幅変調 (SPWM)
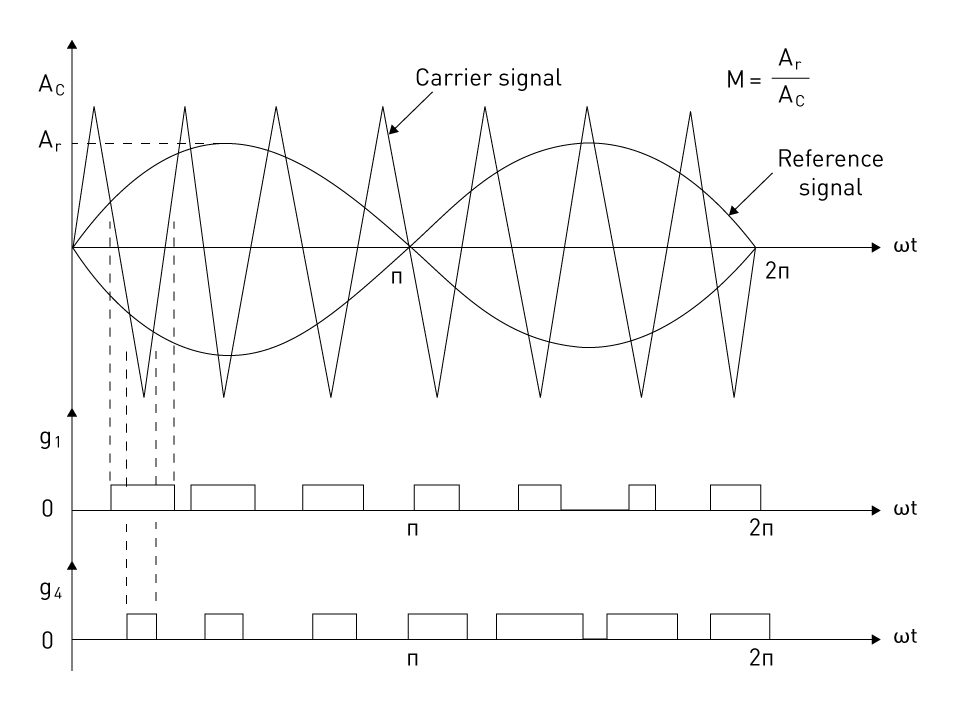
図28 : 正弦波パルス幅変調におけるゲート信号の生成
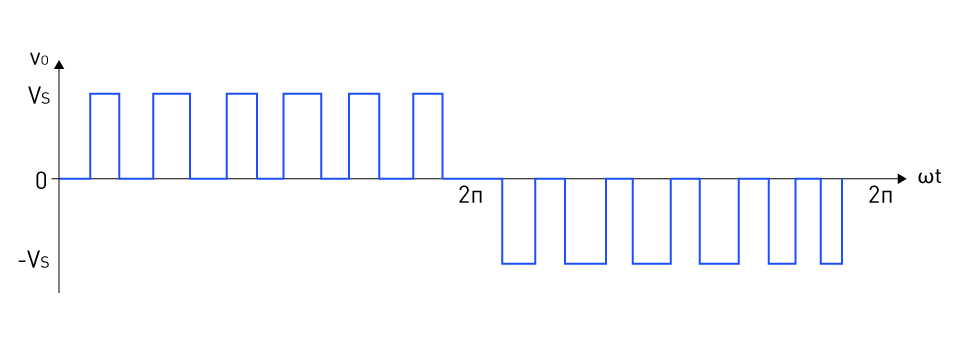
図29 : 正弦波パルス幅変調の出力電圧波形
正弦波パルス幅変調 (略称SPWM) は、より複雑なPWMタイプです。図29では、SPWMは正弦波基準信号と三角波キャリア信号を比較することにより、各ゲート信号g1およびg4のパルス列を生成します。各パルスの幅は、その中心での基準正弦波の振幅に比例して変動します。基準信号周波数によって、SPWMの出力信号周波数が決まります。さらに、リファレンス信号のピーク振幅は、出力RMS電圧を制御する変調指数Mに影響を与えます。各出力信号サイクルのパルス数はキャリア周波数によって決まります。同じブリッジアーム内の2つのスイッチが同時に動作することはありません。図29は、代表的な出力電圧波形をSPWMで示しています。SPWMは、単一および複数のパルス幅変調方式と比較して、はるかに低い高調波およびDFでより優れた高調波除去機能を提供します。
他にも、キャリア信号が半周期の最初と最後の60度の間隔でのみ印加される場合など、SPWMのバリエーションがあり、出力高調波品質が向上します。
選択的高調波除去 (SHE)
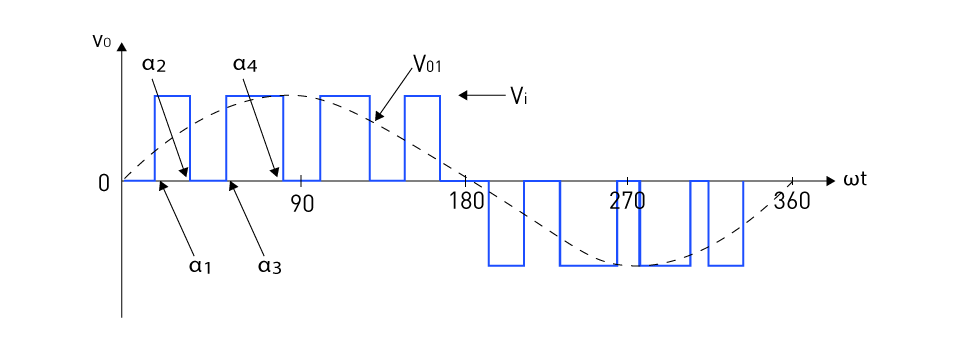
図30 : SHE変調を使用した3次、5次、および7次の高調波除去の代表的な出力波形
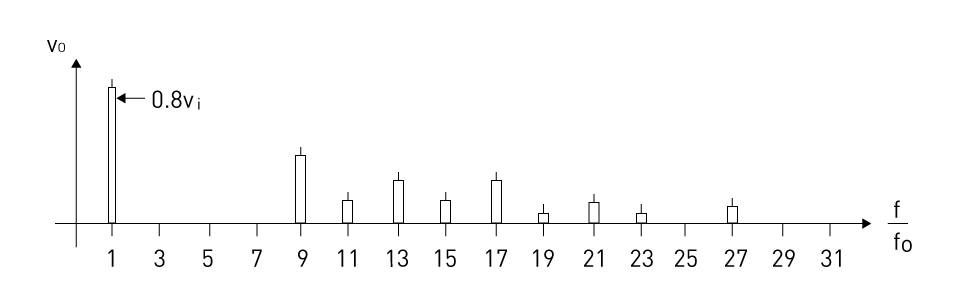
図31 : SHE変調におけるゲート信号の生成
選択的高調波除去 (SHE) は、出力波形から特定の高調波を除去するためのPWM方式です。出力でも高調波が自然に存在します。その結果、SHEは単相インバータ出力の奇数の高調波を低減しようとします。SHEは、α1, α2, α3, αNのような理想的なゲートスイッチング角を得るために正弦波を用いた一連の非線形方程式の計算を必要とします、一般に、基本成分を変更し、N-1高調波を除去するには、N個の半周期パルス (スイッチング角) が必要です。N個の非線形方程式を解いて、スイッチング角度を求めます。図30は、3次、5次、7次の高調波を除去した代表的な出力波形を示しています。図31は、図30で生成された出力信号に対応する周波数スペクトルを示しています。
三相インバータ
三相インバータは、各単相インバータの出力が120度ずれた3つの単相インバータと考えることができます。したがって、単相インバータのために上述したPWM方法論は依然として適用可能です。例えば、SPWMでは、120度の間隔で生成された3つの正弦波リファレンスがキャリア信号と比較され、位相に適切なゲート信号が提供されます。
独自の構造を活かした三相インバータには、さまざまな革新的な方法があります。
3次高調波PWM
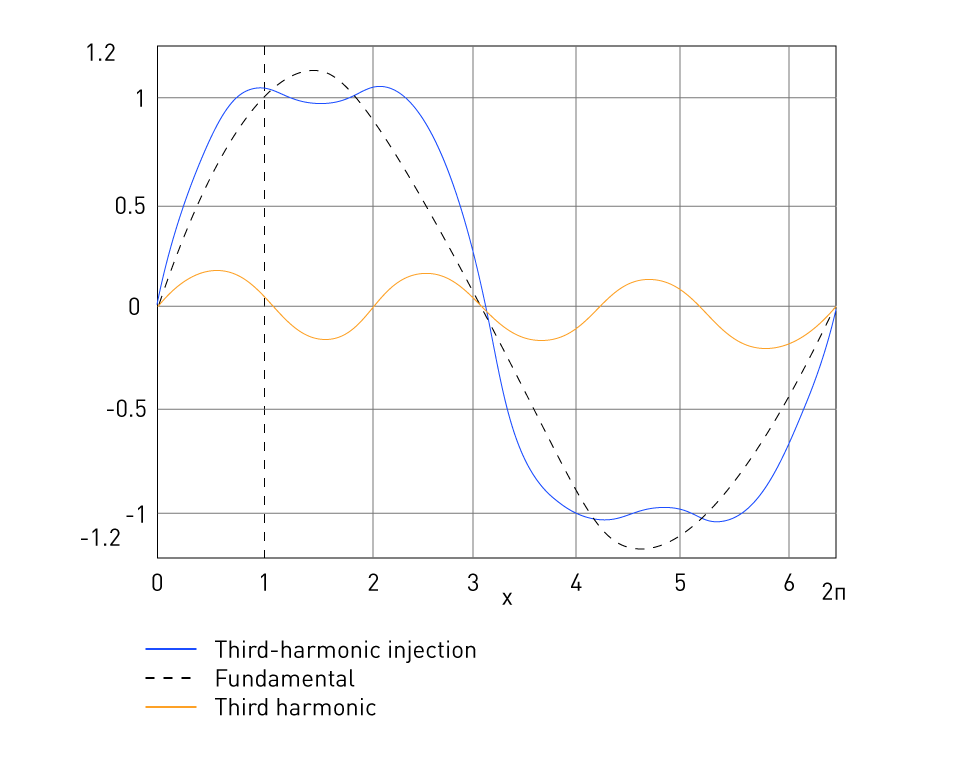
図32 : 3次高調波PWMでの基準信号の生成
3相インバータ用の3次高調波PWMの基準信号は、図32に示すように、基本信号と3次高調波で構成されています。各相に第3高調波成分が存在する場合、ニュートラル端子の3次高調波成分は効果的にキャンセルされます。3次高調波PWMは、正弦波PWMよりも約15.5%高い基本部品を提供することで、正弦波PWMよりも優れたDC電源電圧消費を実現します。
空間ベクトル変調
SVMは、一般的に三相インバータシステムで採用されている高度なパルス幅変調 (PWM) 技術です。180度通電、SPWMなどの他のアプローチと比較して、ソースの使用量が高く、高調波が少ないという利点があります。SVMは、与えられた (または基準) 負荷ライン値に平均的に等しいPWM負荷ライン電圧を生成するデジタル変調技術です。SVMは、インバータ性能を最大限に引き出すことができるため、モータ駆動、再生可能エネルギーシステム、無停電電源など、さまざまなアプリケーションで大きな人気を得ています。
SVMアプローチと従来のPWMアプローチの基本的な違いは、スイッチングパターンの数学的定式化と生成にあります。出力電圧はSVMによりα‐β平面と呼ばれる複素平面のベクトルとして表され、必要な電圧ベクトルを得るために適切なスイッチング状態が決定されます。
空間ベクトル変調の原理
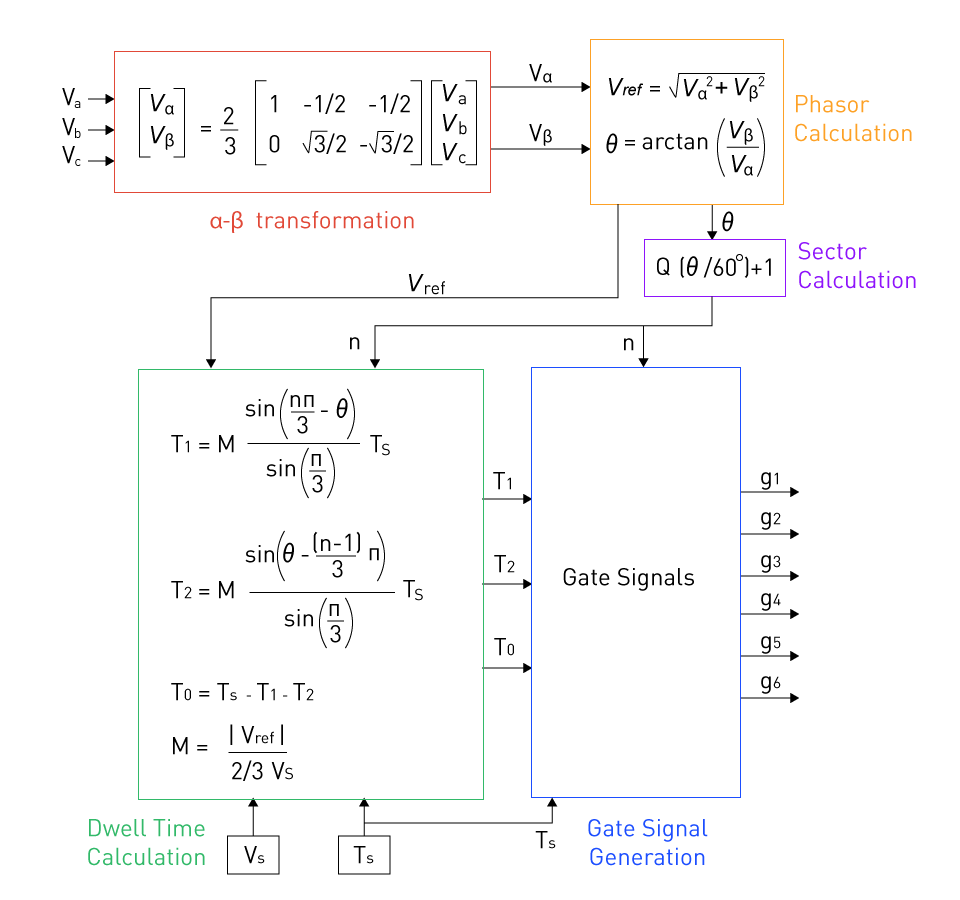
図33 : SVM技術のブロック図
図33は、ゲート信号生成のためのSVM技術のブロック図を示しています。SVM法の主要な機能要素を以下で説明します。
α - β変換 : α-β変換を用いて、基準三相電圧を最初に二次元平面に表現します。三相電圧空間ベクトル Va、Vb、Vcをα-β面に投影し、VαとVβの二つの成分を持つ単一ベクトルを得まず。変換用の式は、図33に示すように、α-β変換ブロックに示されています。
フェーザ計算 : 次に、図33のフェーザ計算ブロックの式を用いて、VαとVβ成分をフェーザに変換し、α-β平面上でのVrefと角度θを推定します。
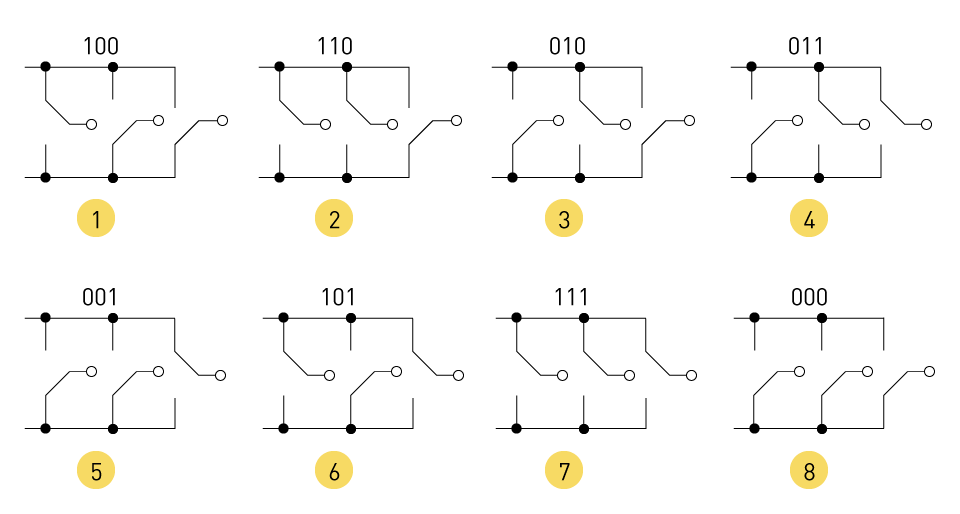
図34 : インバータのスイッチング状態
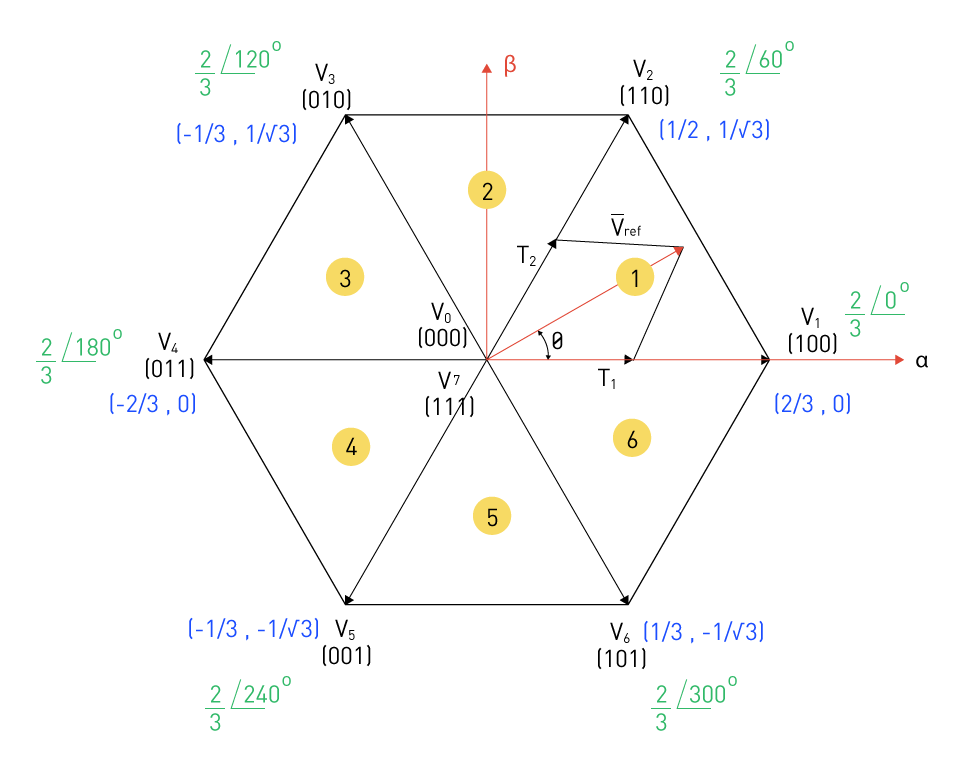
図35 : セクタおよび隣接スイッチング状態の計算
セクタ計算 : 表1は、6つの電源スイッチのオン / オフ位置によって制御される8つの異なるスイッチング状態を持つ三相電圧源インバータ (VSI) を示しています。6つのアクティブ状態と2つのヌル状態があります。図34は、有効な状態に関連付けられたインバータ構成を示しています。図35に示すように、有効な状態に関連する空間ベクトルは平面の六角形上にあり、ゼロベクトルは原点にあります。参照ベクトルがある活性セクタは、n = Q(θ /60 °) + 1を用いて求められます。ここでQは分数の商です。
表1 : 3相VSIの有効なスイッチング状態および関連する正規化された空間ベクトル
| 電圧ベクトル | スイッチの状態 | ライン / ニュートラル間電圧 | 空間ベクトル | ||||
| V1 | a | b | c | Van | Vbc | Vcn | |
| 1 | 0 | 0 | $$\frac{2}{3}$$ | $$\frac{-1}{3}$$ | $$\frac{-1}{3}$$ | $$(\vec{Q}=\frac{2}{3}+0j=\frac{2}{3}0°)$$ | |
| V2 | 1 | 1 | 0 | $$\frac{1}{3}$$ | $$\frac{1}{3}$$ | $$\frac{-2}{3}$$ | $$(\vec{Q}= \frac{1}{3}+ \frac{1}{\sqrt{3}}j=\frac{2}{3}60°)$$ |
| V3 | 0 | 1 | 0 | $$\frac{-1}{3}$$ | $$\frac{2}{3}$$ | $$\frac{-1}{3}$$ | $$(\vec{Q}= \frac{-1}{3}+ \frac{1}{\sqrt{3}}j=\frac{2}{3}120°)$$ |
| V4 | 0 | 1 | 1 | $$\frac{-2}{3}$$ | $$\frac{1}{3}$$ | $$\frac{1}{3}$$ | $$(\vec{Q}= \frac{2}{3}+ 0j=\frac{2}{3}180°)$$ |
| V5 | 0 | 0 | 1 | $$\frac{-1}{3}$$ | $$\frac{-1}{3}$$ | $$\frac{2}{3}$$ | $$(\vec{Q}= \frac{-1}{3}+ \frac{1}{\sqrt{3}}j=\frac{2}{3}240°)$$ |
| V6 | 1 | 0 | 1 | $$\frac{1}{3}$$ | $$\frac{-2}{3}$$ | $$\frac{1}{3}$$ | $$(\vec{Q}= \frac{1}{3}+ \frac{1}{\sqrt{3}}j=\frac{2}{3}300°)$$ |
| V0 | 0 | 0 | 0 | 0 | 0 | 0 | $$(\vec{Q}= 0+ 0j=0 0°)$$ |
| V7 | 1 | 1 | 1 | 0 | 0 | 0 | $$(\vec{Q}= 0+ 0j=0 0°)$$ |
滞留時間の計算 : SVMの目標は、有効な状態とその滞留時間 (各ベクトルが適用される長さ) に対応する適切な空間ベクトルを選択することによって、必要な出力電圧を生成することです。これらのベクトルを特定のスイッチング時間で正しく選択して使用することで、必要な出力電圧を (平均して) 合成することができます。滞留期間は、スイッチング期間の平均電圧ベクトルが目的の出力電圧ベクトルに近いように決定されます。図33の滞留時間ブロックは、各条件の滞留時間の計算に必要な方程式を示しています。このブロックの入力は、ソース電圧Vsとスイッチング時間Tsです。VsとVrefを使用すると、変調指数Mを計算できます。これを使用して、隣接する有効状態のそれぞれのタイミングT1とT2、およびヌル状態の時間T0を計算できます。時間は正の値しか成りえないので、Mの値は0から√3/2まで変化します。
注 : 過変調 (6ステップ動作としても知られる) は、インバータを動作させるためのもう1つのオプションですが、これにより出力歪みが増加する可能性があります。
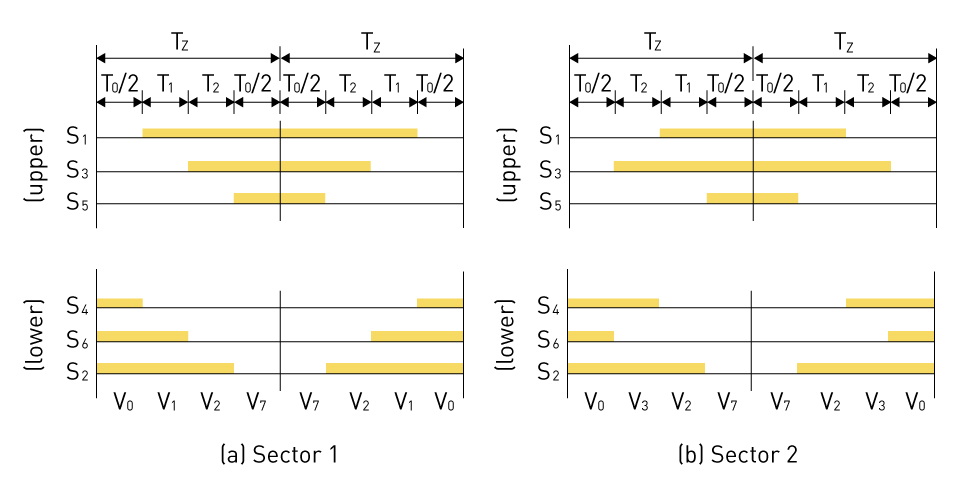
表2 : すべてのSVMセクタのスイッチングパターン ゲート信号生成 : ゲート信号はSVMの最終フェーズで生成されます。ゲート信号生成ブロックは、各セクタの各スイッチング状態の滞留期間に関する情報を受信します。各SVMセクタの切り替えパターンを表2に示します。偶数次高調波を低減するために、これらのパターンは出力電圧が4分の1波長偶数対称になるように構成されています。また、スイッチング損失を低減するために、スイッチングパターンの一度に1ビットのみを変更するようにもしました。これと同様に、ヌル状態に対応するゼロベクトルは、これらの状態間を移動するときにスイッチングパターンができるだけ変更されないように選択されます。 図36 : セクタ1および2のスイッチングパターンと滞留時間 図36は、セクタ1と2のスイッチングパターンとそれに伴う滞留期間を反映しています。他の産業でも同様のパターンが見られます。3相ブリッジインバータのスイッチQ1~6は、ゲートのシーケンスを使用してトリガーできます。 図37 : SVMでの出力電圧の例 SVM変調を利用したインバータライン出力電圧の代表例を図37に示します。 これらは電圧源インバータ (VSI) に似ていますが、電流源インバータ (CSI) は、VSIとは異なる独自の特性を持つ有益なクラスのDC/ACコンバータです。電圧源ではなく電流源を使用することで、CSIはグループとして突出しています。これは、負荷に関係なく、電流出力が一定であることを意味します。これは、一定の電圧を放出するVSIとはまったく対照的です。その結果、CSIは負荷やラインインピーダンスの変動に影響されない出力電流が要求されるアプリケーションに特に適しています。 電圧と電流の役割を入れ替え、インピーダンスをその逆に置き換えることで、一方の属性を他方に変えることができるので、CSIとVSIは互いに二重であると考えることができます。例えば、VSIは電圧を一定に保つために大きなコンデンサを使用し、CSIは電流を一定に保つために大きなインダクタを使用します。この二重性は、制御戦略と安全装置にも適用され、VSIは過電流安全を必要とし、CSIは過電圧安全を必要とします。CSIには、短絡保護機能が内蔵されていることや誘導負荷による高性能化などの利点がありますが、設計や管理がより困難になる可能性があり、多くのアプリケーションに適していない可能性があることを忘れないようにしましょう。 インバータ設計プロセスでは、いくつかの重要な一般的な設計上の問題に対処する必要があります。負荷要件によって、インバータの基本設計が決まります。選択したインバータトポロジー、負荷、および制御方法によって、インバータ内のパワーデバイスの電圧および電流定格が決まります。これは (1) 瞬時負荷電流の評価、および (2) 各部品を流れる電流のプロットまたはシミュレーションする設計用に必要です。電流レベルを理解すると、パワーデバイスの定格を決定することができます。デバイスの電圧定格を評価するには、各デバイスの逆電圧を識別する必要があります。これらは解析的または数値的に計算され、シミュレーションによって検証されます。最後になりましたが、出力フィルタを正しく設計して、電力品質と高調波の低減を保証する必要があります。Cフィルタ、LCチューンフィルタ、CLCフィルタなど、さまざまな基本的なタイプのフィルタがあり、それぞれの長所、短所があります。 効率と電力品質は、他のパワーコンバータと同様に、インバータの重要な概念です。 インバータの効率は、入力DC電力が出力AC電力にどの程度変換されるかを示します。スイッチング、発熱、およびスタンバイ電力はすべて、電力損失の原因となります。インバータの効率は以下です。 ここで、PACはAC電源出力、PDCはDC電源入力です。高品質の正弦波インバータは、90~95%のピーク効率であることがしばしばです。低品質の修正正弦波インバータは75~85%の効率です。高周波インバータは通常、効率の点で低周波の同等品よりも優れています。 インバータの効率は負荷によって決まります。わずかな偏差のみで、高出力電力で効率はほぼ最高です。それにもかかわらず、電力出力が10~15%未満の場合、効率は非常に低くなります。これは、インバータのスタンバイ損失がすべての出力電力レベルで一定であり、低い出力での効率が低下するという事実によって説明できます。 電力品質は、インバータ出力の類似の概念です。一般に、出力電力は高調波成分がほとんどない正弦波である必要があります。高調波は、電力効率の低下、不必要な過熱、機器の寿命の短縮など、望ましくない結果につながる可能性があります。したがって、高調波を低減するためには、PWMの方法とフィルタが必要です。
セクタ
セグメント
1
2
3
4
5
6
7
1
ベクトル状態
V0
000V1
100V2
110V7
111V2
110V1
100V0
000
2
ベクトル状態
V0
000V3
010V2
110V7
111V2
110V3
010V0
000
3
ベクトル状態
V0
000V3
010V4
011V7
111V4
011V3
010V0
000
4
ベクトル状態
V0
000V5
001V4
011V7
111V4
011V5
001V0
000
5
ベクトル状態
V0
000V5
001V6
101V7
111V6
101V5
001V0
000
6
ベクトル状態
V0
000V1
100V6
101V7
111V6
101V1
100V0
000

電流源インバータ (CSI) - 電圧源インバータ (VSI) の二重構造
設計上の考慮事項
インバータの効率と電力品質
アカウントにログイン
新しいアカウントを作成