自動運転における電力管理の課題
自動運転の背後にある技術が進歩し続けるにつれて、パワーエレクトロニクスと管理の機能はますます重要になるでしょう。自動運転を可能にする先進技術には、従来の車両システムとは異なる電力管理に関する独自の問題があります。
センサおよびコンピューティングシステムの消費電力の増加
周囲の情報を収集する場合、自動運転車はLidar (ライダー) 技術から超音波システムに至るまで、さまざまなセンサに依存しています。すべてのセンサは電力を必要とし、1台の車両上のセンサの総数とセンサの数を乗算すると、全体の電力消費はかなり大きくなる場合があります。
さらに、これらのセンサが収集するデータは、搭載されている強力なコンピューティングシステムによってリアルタイムで処理されます。これらのシステムは1時間あたりテラバイト単位のデータを分析する必要があるため、高性能なCPUが非常に必要になります。これらのプロセッサは、処理能力の点で効率的であるにもかかわらず、大量の電力を必要とします。
さらに、車両が駐車している場合 (例えば、信号停車のとき) でも、これらのシステムの継続的な走行は車両の全体的な電力消費にさらに寄与します。車両が使用されていないときにシステムの多くを休止状態にする傾向がある従来の車両とは対照的に、多くの自律システムはアクティブに働き続け、情報を継続的にスキャンして処理します。
信頼性と安全性の要件
自律走行車の信頼性は、単なる性能パラメータではなく、安全性と性能の両方の問題です。これらの車の電力システムが適切に機能するには、非常に信頼性が高い必要があります。電源が遮断されると、センサまたはプロセッサが誤動作し、車内の人および道路上の他の人の安全が危険にさらされる可能性があります。
高い信頼性に対する要望の結果として、安定した電力バックアップシステムにますます重点が置かれるようになってきており、これはしばしば二重または三重の冗長性を必要とします。これにより、いずれかのシステムに障害が発生した場合でも、バックアップシステムがすぐに、中断することなく引き継ぐことができます。
さらに、安全基準は、電力システムがいかなる混乱も経験することなく急激な高負荷要求に耐えられることが求められます。例えば、緊急事態の場合、車両は、意思決定を行ったり、複数のシステムを同時に起動したりするために、追加の計算能力へのアクセスを必要とする場合があります。例えば、自律走行車が差し迫った衝突を検出した場合、障害物を回避するために、ブレーキシステム、ステアリング調整、およびさまざまなセンサを直ちに作動させる必要があります。これには、LiDAR、レーダー、カメラからのデータを処理すると同時に、ブレーキやステアリングアクチュエータなどの機械システムを作動させるために、計算能力を急速に向上させる必要があります。これは、遅延や電力不足なしに実行する必要があります。
さらに、パワーエレクトロニクス自体は、温度、振動、および電磁障害の変動などの外部の変動に対して耐性がある必要があります。これは、限定スペースと重量という現在の車が受ける制約を考えると、達成するのが特に困難な作業になる可能性があります。
結論として、自律走行車の運転を可能にする技術そのものが、電力管理に関して複雑な問題を引き起こします。これらの問題に対処するためには、性能、安全性、および効率の間のバランスをとる新しいエンジニアリングソリューションが求められます。これらの最先端システムの信頼できる安全な動作を保証するために、自動車産業が完全な自律走行車へ前進し続ける中で、パワーエレクトロニクスはますます重要な役割を果たすことになります。




自動運転車のための電力管理ソリューション
自律運転車のための技術を開発することは、センサ (カメラ、LiDAR、レーダー、超音波など) によって収集される大量のデータを処理する必要があるため、困難です。これに加えて、リアルタイムでフィードバックを提供することが求められ、これには、とりわけ、天候、イベント、交通状況、道路標識、および交通信号に関する情報が含まれます。オブジェクトの抽出、識別、セグメンテーション、追跡、およびその他の同様のアクティビティなど、いくつかの要求の厳しいタスクを同時に処理するためには、1秒あたり数兆回の操作 (TOPS) を必要とします。
特定の操作に応じて、使用される電力量も同様にかなりの量になります。結論として、高速処理、信頼性、精度は非常に重要であり、人間よりも優れている必要がある側面です。
エネルギー効率に優れたコンピューティングアーキテクチャ
大量のデータをリアルタイムで処理する場合、自動運転車は主に車両に組み込まれたコンピューティングシステムに依存します。従来のコンピューティングアーキテクチャは強力ですが、ここで実行されているタスクに対しては最もエネルギー効率が高くない可能性があります。
エネルギー消費に関して経済的な現代のアーキテクチャは、自動運転の特定の計算要件を満たすように適合しています。これらのアーキテクチャは、特殊なハードウェアアクセラレータ、カスタムシリコン設計、または1種類のプロセッサ (中央処理装置、グラフィックス処理装置、またはフィールドプログラマブルゲートアレイなど) が特定の目的に割り当てられる一種のコンピューティングであるヘテロジニアスコンピューティングを利用することができます。これらのステップを実行した後、コンピューティングシステムは、より高いワット当たりの性能を達成することができ、その結果、エネルギー使用の大幅な節約につながります。
高度なパワーゲーティング技術を利用することにより、さらなる省エネルギーと熱出力の低減が達成されます。これらの技術により、チップの一部の領域が使用されていないときに遮断されることが可能になります。
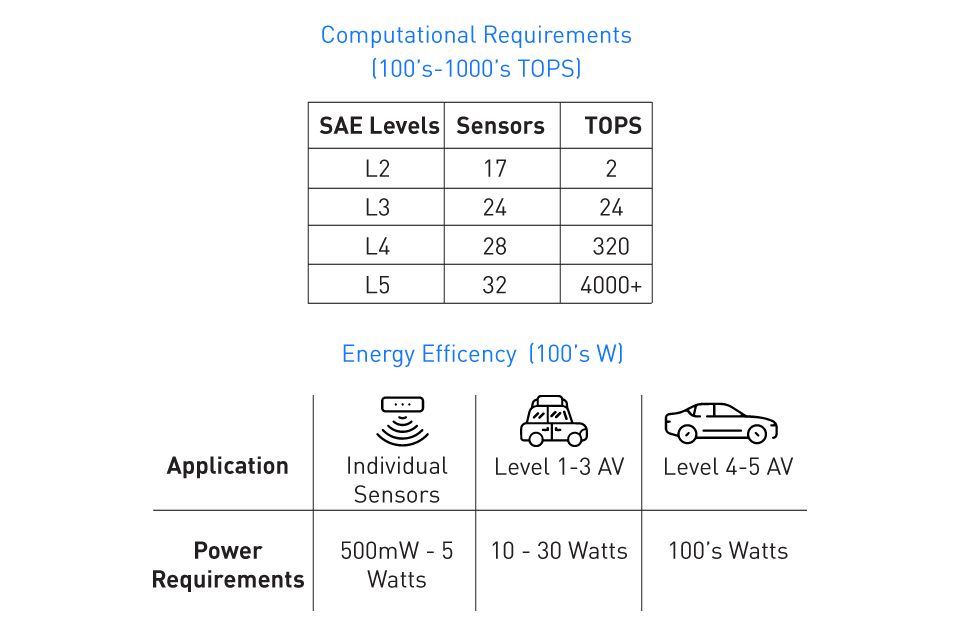
図1 : 自動運転における計算と電力要件のスケーリング
冗長性とフェイルセーフシステム
自律運転車の運用と安全性にとって継続的な電力が極めて重要であることを考えると、冗長性は自律走行車の場合において最も重要です。1つのシステムの誤動作がシステム全体の故障を引き起こさないことを保証するために、これらの車両は、互いに独立した多数の異なる電源および回路を頻繁に使用しています。
たとえば、重要なセンサには2つの電力供給があり、いずれかの電源に障害が発生した場合でも機能し続けることが保証されます。また、重要なコンピューティングシステムには、障害が発生した場合にすぐに電力を供給できるバックアップバッテリーを装備することも可能です。
これらの自動車は、冗長部品を有することに加えて、フェイルセーフ装置も持っています。特定の誤動作が発生した場合、システムは「セーフモード」に入ることが可能です。このモードでは、すべての主要な安全システムが正常に機能し続けることを保証しながら、車両を減速させたり、安全に停止させたりすることができます。
自動運転車の数が急速に増加し続ける中で、信頼性と有効性の両方を備えた電力管理システムを持つことの重要性は、強調しすぎることはありません。産業は、これらの高度に洗練された自動車によってもたらされる課題に直面するために、継続的に進化しています。冗長性、アダプティブ電力調整、およびコンピュータアーキテクチャは、実装されている進歩の一部です。最終目標は非常に明確であり、安全で摩耗がないだけでなく、エネルギー消費の面でも効率的な運転体験を提供することです。
導入事例と実際の導入
実世界でのアプリケーションは、理論的な答えを評価することができる現実的な視点を提供します。自律走行車の電力管理技術を実際に観察することで、現在使用されている多くのアプローチの成果と落とし穴を明らかにできます。このセクションでは、いくつかの注目すべき実装を検討し、それらの実装から洞察を引き出します。
現在の自動運転車における電力管理の例
ウェイモのカスタムコンピュータ: アルファベットが所有するウェイモは、電力効率を最大化する目的で、自動運転車専用に作成されたコンピュータを使用しています。このシステムは、センサデータを解釈し、運転に関する判断を非常に短い遅延で行うことができるため、リアルタイムでの応答が保証されます。システムが計算の必要性に応じてその消費を動的に調整するという事実を考えると、アダプティブな電力調整を明確に見ることができます。
NVIDIAのDRIVE AGXプラットフォーム: 多くの自動車メーカーで利用されているこのプラットフォームは、エネルギー効率の非常に高い処理アーキテクチャを利用しています。Drive AGXプラットフォームは、そのディープラーニング機能のおかげで、大量のデータを効率的に処理することができます。さらに、パフォーマンスと消費電力のバランスをとる、AIに最適化されたハードウェアのメリットも得られます。
得られた教訓とベストプラクティス
拡張性が重要: ウェイモの車両が拡大し、ソフトウェアがより洗練されるにつれて、ビジネスはスケーラブルな電源管理ソリューションが不可欠であることを認識するようになりました。電力消費に関しては、システムは直線的な増加を経ることなく、より複雑なタスクを処理できる必要があります。ウェイモは現在、パフォーマンスと消費電力のバランスをインテリジェントにとるエネルギー最適化アルゴリズムの開発に取り組んでいます。これにより、最も多くのエネルギーを必要とするプロセスが、絶対に必要な場合にのみ作動するようになります。
さらに、自律システムが残す全体的なエネルギーフットプリントを削減するために、より優れた電力効率を持つ次世代のハードウェアに投資しています。この方法では、特定の機能を汎用部品よりも効果的に実行するように設計された特殊なハードウェア部品を作り出し、それによって、不要な操作に浪費される電力の量を削減します。
譲れない冗長性: NVIDIAのDRIVE AGXプラットフォームは、他のプラットフォームの中でも特に、冗長性の本質的な機能に注目を集めています。安全性と中断のない動作が最も重要な状況に関しては、バックアップシステムや並列回路があれば、むしろ命を救うことができます。
継続的な学習と反復: 絶え間ない学習と反復の哲学は、自動運転とパワーエレクトロニクスの両方で行われている急速な進歩に対応するために、メーカーが採用する必要があるものです。現在効果的なものは、数年後には時代遅れになるかもしれません。システムのレビューと変更は定期的に実行する必要があります。
自律走行車における電力管理の現実でのアプリケーションは、多様であるだけでなく、有益であると結論づけることができます。そうすることで、全体的な設計の重要性、スケーラビリティの要件、冗長性の議論の余地のない性質、および継続的なイノベーションの要件を明らかにしました。これらの教訓とベストプラクティスは、一般大衆への普及がますます近づいている自動運転車の分野における将来の躍進のための強固な柱として役立つでしょう。
アカウントにログイン
新しいアカウントを作成