フライバックコンバータのフィードバックループ補償器を4ステップで設計する方法

はじめに
フライバックコンバータは、その汎用性、設計の容易さ、低コストにより、パワーエレクトロニクスで最も広く使用されているトポロジーの1つになりました。その構造は、3つの基本トポロジーの1つ、具体的には昇降圧トポロジーから派生しています。ただし、昇降圧型コンバータとは異なり、フライバックトポロジーでは、電圧出力を入力電源から電気的に絶縁できます。この機能は、産業用および消費者向けアプリケーションにとって不可欠です。
電力コンバータを安定化するために使用されるさまざまな制御方法の中で、最も広く使用されている制御方法はピーク電流モードです。このモードでは、一次電流を継続的に感知して、電源に重要な保護を提供します。さらに、より高い設計性能を得るために、クロスレギュレーションと呼ばれる技術を使用して、最も負荷が高い出力でコンバータを制御するのが一般的です。
本稿の目的は、最適な機能を提供するためにフライバックコンバータを安定させる制御ループを正しく設計する方法を読者、エンジニア、学生に示すことです。このプロセスには、定常誤差を最小限に抑え、必要に応じて帯域幅を増減し、位相 / ゲイン余裕を可能な限り増やすことが含まれます。
クローズドループフライバックコンバータのブロック図
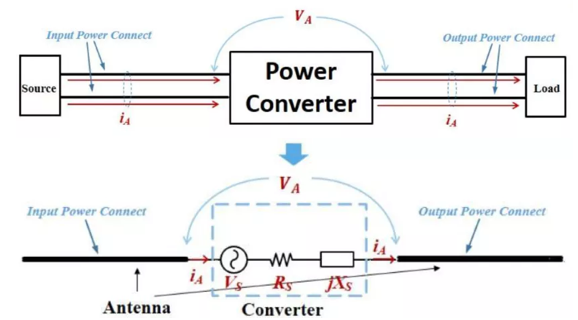
コントローラがピーク電流制御モードのフライバックを安定させるために必要な計算を行う前に、クローズドループシステム全体の構成要素、つまりコンバータの平均モデルと制御ループを理解することが重要です (図1参照)。
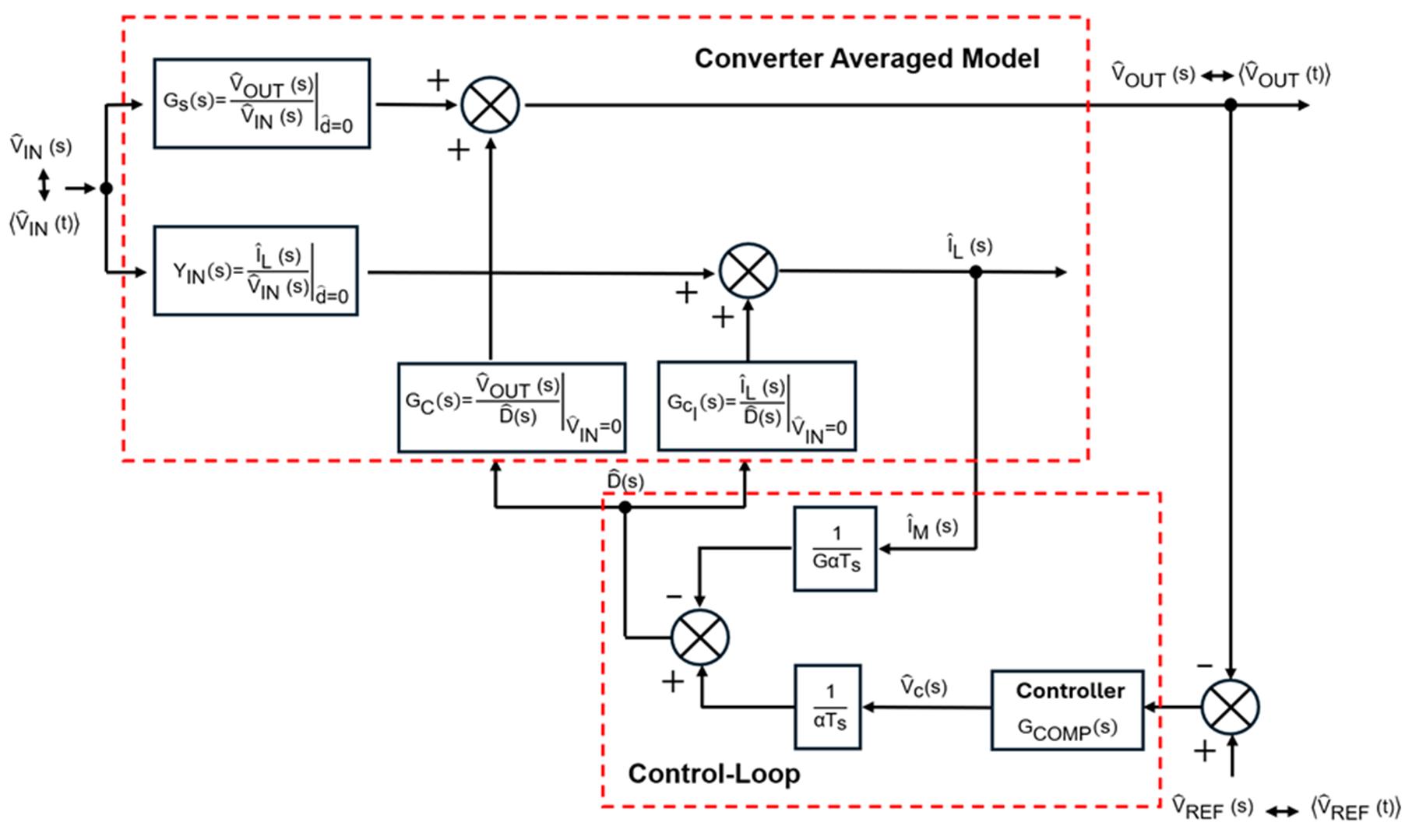
図1: クローズドループシステムのブロック図
設計エンジニアの主な関心は、負荷の変化下でのコンバータの動作を研究することです。固定入力電圧 (VIN) を考慮すると、オープンループ伝達関数は、デューティサイクルで生成される小さな摂動の下でモデル化され、電源の動的応答を調べることができます。
要約されたオープンループシステムは式 (1) でモデル化できます。
$$ T_{V0}(s) = \left. \frac{\hat{V}_{OUT}(s)}{\hat{V}_{C}(s)} \right|_{\hat{V}_{IN} = 0} = \frac{G \cdot G_{C}(s)}{G_{CI}(s) + G\alpha T_{s}} $$ここで、Gは電圧に変換された電流検出ゲインで、GC(s)とGCI(s)は、デューティサイクルの小さな変動に対する出力電圧と磁化電流応答に関するフライバックコンバータの伝達関数であり、GαTSは、スイッチング周波数の半分での二極振動を回避するためのランプ補償のモデリングです。





フライバックコンバータの制御設計と部品の選択
フライバックコンバータの制御ループの設計には、多くの決定とトレードオフが伴います。本稿の次のセクションでは、設計プロセスを段階的に説明します。
図2に設計フローを示します。
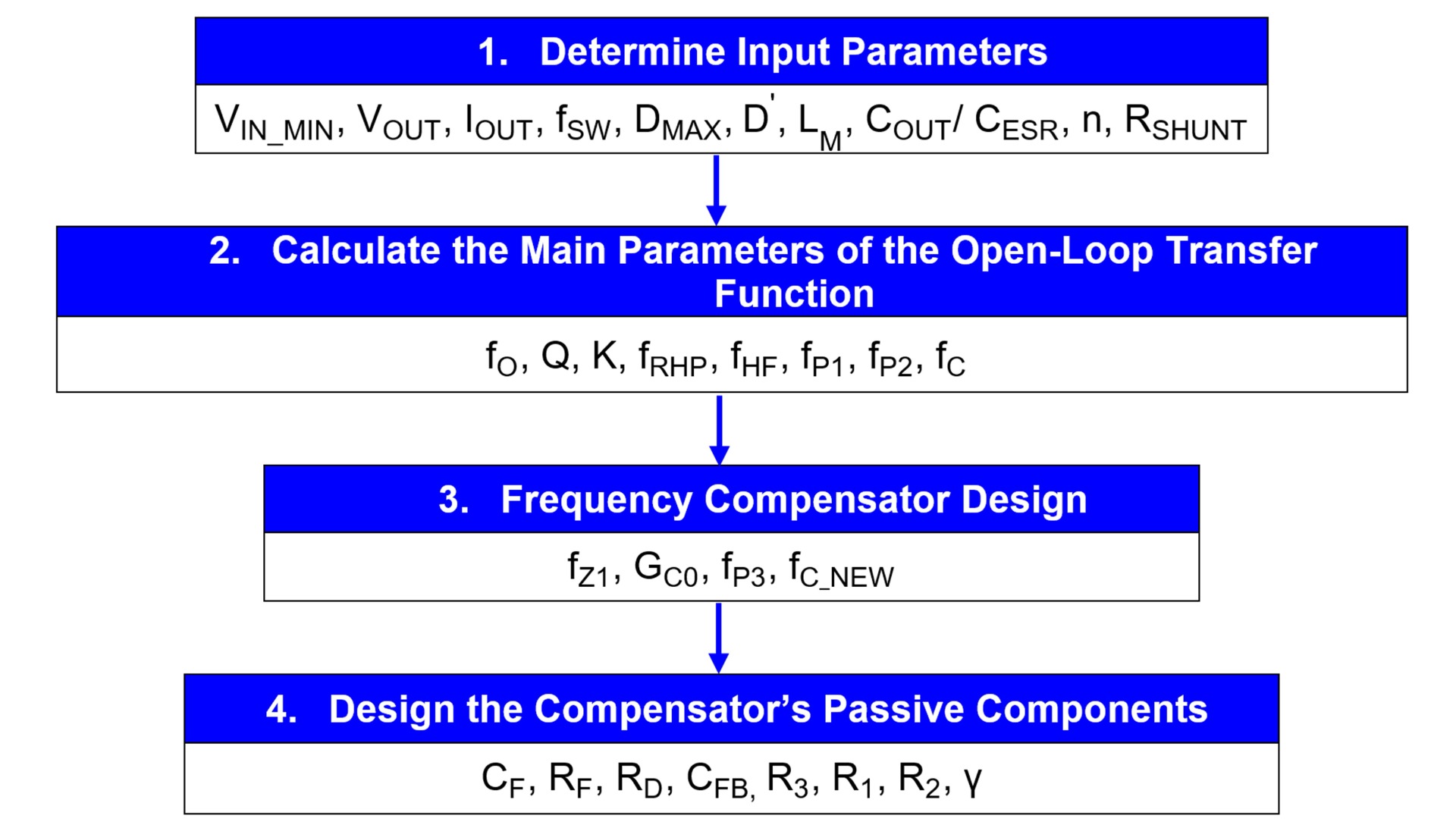
図2: 制御ループ設計フローチャート
制御ループの設計プロセスと計算
ステップ1: 設計入力
コンバータの主なパラメータが関連仕様に従って設計されたら、制御ループ設計の入力としてパラメータを定義します。これらのパラメータには、入力電圧と出力電圧 (それぞれVINとVOUT)、動作モード、スイッチング周波数 (fSW)、デューティサイクル、磁化インダクタンス (LM)、巻数比 (NP:NS)、シャント抵抗器 (RSHUNT)、出力容量 (COUT) が含まれます。表1は、本稿で説明した回路の設計入力の概要を示しています。
表1: 設計入力の概要
| 設計入力 | 値 |
| 最小入力電圧 (VIN_MIN) | 85VAC |
| 出力電圧 (VOUT) | 12V |
| 出力電流 (IOUT) | 3.33A |
| 動作モード | VIN_MINでのCCM |
| スイッチング周波数 (fSW) | 65kHz |
| 最大デューティサイクル (DMAX) | 46% |
| 二次デューティサイクル (D’) | 54% |
| 磁化インダクタンス (LM) | 610µH |
| 出力容量 / ESR (COUT/CESR) | 950µF/15mΩ |
| 回転比 NS:NP (n) | 1/6 |
| シャント抵抗器 (RSHUNT) | 0.4Ω |
フライバックコンバータ補償装置を設計するには、まずコンバータを構成するすべての主要部品を入手する必要があります。本稿では、MPSのHF500-40フライバックレギュレータを使用して、フォトトカプラフィードバックを使用した補償器の設計が複雑なプロセスではないことを実証します。このICは、スロープ補償を内蔵した固定周波数の電流モードレギュレータです。コンバータは低ライン入力で連続導通モード (CCM) で動作するため、スイッチング周波数の半分の周波数で二極振動が発生し、内蔵のスロープ補償がこの振動を減衰させ、その影響はほぼゼロになります。
ステップ2: オープンループ伝達関数のパラメータを計算する
オープンループ伝達関数のパラメータを計算し、動的動作レベルでコンバータを最適化できる補償器のすべてのパラメータの値を計算することが重要です。
ピーク電流制御フライバックコンバータのオープンループ伝達関数 (補償ランプ係数も含む) は、式 (2) で推定できます。

ここで、D'は、スイッチング サイクル中に二次側ダイオード (または同期FET) がアクティブになる時間の割合によって定義されます。
基本的な標準モデルは式(3)で定義できます。
$$ \left. \frac{\hat{V}_{OUT}(s)}{\hat{V}_{C}(s)} \right|_{\hat{V}_{IN} = 0} = G_{C0} \cdot \left(1 - \frac{s}{\omega_{\text{RHP}}} \right) \left(1 + \frac{s}{\omega_{\text{HF}}} \right) \Bigg/ \left[ \left( \frac{s}{\omega_o} \right)^2 + \frac{s}{\omega_o Q} + 1 \right] $$
出力コンデンサに対する等価直列抵抗 (ESR) の影響は最も重要な寄生効果であるため、伝達関数に含まれていることにご注意ください。
式(2)と式(3)を用いることで、重要なパラメータを計算することができます。
共振周波数 (fO) は式(4)で計算できます。
$$ f_O = \frac{\omega_0}{2\pi} = \frac{1}{2\pi} \cdot \sqrt{ \frac{ \left( \frac{{D'}^3 \cdot V_{OUT} \cdot T_s \cdot R}{n^2 \cdot L_M} + 2 \cdot n \cdot V_{IN} \cdot (1 + D) \right) }{ R \cdot V_{OUT} \cdot D' \cdot T_s \cdot C_{OUT} } } $$
関連する値を入力した後、fOは式(5)で計算できます。
$$ f_0 = \frac{1}{2\pi} \sqrt{ \frac{ \left( \frac{0.54^3 \times 12 \times \frac{12}{3.33}}{ \left( \frac{1}{6} \right)^2 \times 610 \times 10^{-6} \times 65 \times 10^3 } + 2 \times \frac{1}{6} \times 85 \sqrt{2} \times (1 + 0.46) \right) }{ \frac{12}{3.33} \times 12 \times 0.54 \times \frac{1}{65 \times 10^3} \times 950 \times 10^{-6} } } = 2.191 \, \text{kHz} $$
右半平面の零点 (fRHP) は式(6)で推定できます。
$$ f_{\text{RHP}} = \frac{{D'}^2 \cdot R}{2\pi n^2 L_M D} = \frac{0.54^2 \cdot \frac{12}{3.33}}{2\pi \cdot \left( \frac{1}{6} \right)^2 \cdot 610 \times 10^{-6} \cdot 0.46} = 21.46 \, \text{kHz} $$q係数 (Q) は式(7)で計算できます。
$$ Q = \frac{ \sqrt{ \left( \frac{{D'}^3 V_{OUT} T_s R}{n^2 L_M} + 2 n V_{IN} (1 + D) \right) } \cdot \sqrt{ R V_{OUT} D' T_s C_{OUT} } }{ V_{OUT} D' T_s + 2 n C_{OUT} R V_{IN} } $$
関連する値を入力した後、Qは式(8)で推定できます。
$$ Q = \frac{ \sqrt{ \left( \frac{0.54^3 \cdot 12 \cdot \frac{12}{3.33}}{ \left( \frac{1}{6} \right)^2 \cdot 610 \cdot 10^{-6} \cdot 65 \cdot 10^3 } + 2 \cdot \frac{1}{6} \cdot 85 \sqrt{2} \cdot (1 + 0.46) \right) } \cdot \sqrt{ \frac{12}{3.33} \cdot 12 \cdot 0.54 \cdot \frac{1}{65 \cdot 10^3} \cdot 950 \cdot 10^{-6} } }{ 12 \cdot 0.54 \cdot \frac{1}{65 \cdot 10^3} + 2 \cdot \frac{1}{6} \cdot 950 \cdot 10^{-6} \cdot \frac{12}{3.33} \cdot 85 \sqrt{2} } = 0.034 $$
DCゲイン (K) は式(9)で計算できます。
$$ K = \frac{ 2 \cdot G \cdot V_{\text{IN}} \cdot D' \cdot R }{ \frac{{D'}^3 \cdot V_{\text{OUT}} \cdot T_s \cdot R}{n^2 \cdot L_M} + 2 \cdot n \cdot V_{\text{IN}} \cdot (1 + D) } $$ここで
$$ G = \frac{1}{R_{\text{SHUNT}}} $$関連する値を入力した後、Qは式(10)で推定できます。
$$ K = \frac{ 2 \cdot \frac{1}{0.4} \cdot 85 \sqrt{2} \cdot 0.54 \cdot \frac{12}{3.33} }{ \frac{ 0.54^3 \cdot 12 \cdot \frac{12}{3.33} }{ \left( \frac{1}{6} \right)^2 \cdot 610 \times 10^{-6} \cdot 65 \times 10^3 } + 2 \cdot \frac{1}{6} \cdot 85 \sqrt{2} \cdot (1 + 0.46) } = 18.08 = 25.14\,\text{dB} $$高周波ゼロ (fHF) は式(11)で計算できます。
$$ f_{\text{HF}} = \frac{1}{2\pi C_{OUT} R_{ESR}} = \frac{1}{2\pi \cdot 950 \times 10^{-6} \cdot 15 \times 10^{-3}} = 16.75\,\text{kHz} $$電流モード制御では、Qが0.5よりかなり低い値になることが一般的であることに注意することが重要です。これを念頭に置くと、伝達関数の分母の2次多項式の結果は、2つの実数と負の極を与えることになります。これは非常に大きな補償ランプがある場合とは異なり、電圧制御モードや、2つの複素共役極が生じます。
2つの実極と負極は式(12)で推定できます。
$$ f_{P1} = Q \cdot f_O = 0.034 \times 2191 = 74.5\,\text{Hz} \quad \text{and} \quad f_{P2} = \frac{f_O}{Q} = \frac{2191}{0.034} = 64.44\,\text{kHz} $$新しい開ループ伝達関数は式(13)で計算できます。
$$ \left. \frac{\hat{V}_O(s)}{\hat{V}_C(s)} \right|_{\hat{V}_g = 0} = K \cdot \frac{ \left(1 - \frac{s}{\omega_{\text{RHP}}} \right) \left(1 + \frac{s}{\omega_{\text{HF}}} \right) }{ \left(1 + \frac{s}{\omega_{p1}} \right) \left(1 + \frac{s}{\omega_{p2}} \right) } = 25.14 \cdot \frac{ \left(1 - \frac{s}{2\pi \cdot 21.46 \cdot 10^3} \right) \left(1 + \frac{s}{2\pi \cdot 16.75 \cdot 10^3} \right) }{ \left(1 + \frac{s}{2\pi \cdot 74.5} \right) \left(1 + \frac{s}{2\pi \cdot 64.44 \cdot 10^3} \right) } $$カットオフ周波数 (fC) は式(14)で推定できます。 $$ f_C = f_{P1} \cdot K = 74.5 \times 18.08 = 1.35\,\text{kHz} $$
次のセクションでは、周波数補償器の設計によって電源の安定性と優れた性能がどのように実現されるかを説明します。
ステップ3: 周波数補償器の設計
オープンループ伝達関数をモデル化したら、可能な限り最高のパフォーマンスが得られるように周波数補償器を設計する必要があります。上記の伝達関数の周波数応答には 2 つの別々の極 (1つは低周波数、もう1つは高周波数) があるため、単純なタイプII補償器を設計できます。この補償器には、電圧制御モードで共振を生成する二重極が存在するため、追加のゼロは必要ありません。
定常誤差を最小限に抑えるには、低周波数でより高いゲインを生成する反転ゼロ (または原点の極) を設計する必要があります。システムの安定性に影響を与えないようにするには、周波数は式 (15) で計算される最初の極の少なくとも10分の1にする必要があります。
$$ f_{Z1} \leq \frac{f_{P1}}{10} \;\Rightarrow\; f_{Z1} \leq \frac{74.5}{10} \;\Rightarrow\; f_{Z1} \leq 7.45\,\text{Hz} $$高周波でのESR寄生効果のため、この効果を補正して除去するために高周波極を設計する必要があります。極は式(16)で推定できます。
$$ f_{P3} \approx f_{HF} \;\Rightarrow\; f_{P3} \approx 16.75\,\text{kHz} $$一方、カットオフ周波数を変更して、それぞれより高いまたはより低い帯域幅を実現し、より速いまたはより遅い動的応答を生成することが一般的です。カットオフ周波数を選択すると (この場合はfCは6.5kHzまで増加し、fSWの10%になります)、補償器の中周波ゲインは式(17)で計算できます。
$$ G_{\text{COMP}} = \frac{f_{C,\text{NEW}}}{f_{P1}} \cdot \frac{1}{K} \cdot \frac{ \sqrt{1 + \left( \frac{\omega_{z1}}{\omega_{C,\text{NEW}}} \right)^2} }{ \sqrt{1 + \left( \frac{\omega_{C,\text{NEW}}}{\omega_{P3}} \right)^2} } = \frac{6.5 \times 10^3}{74.5} \cdot \frac{1}{18.08} \cdot \frac{ \sqrt{1 + \left( \frac{2\pi \cdot 7.45}{2\pi \cdot 6.5 \times 10^3} \right)^2} }{ \sqrt{1 + \left( \frac{2\pi \cdot 6.5 \times 10^3}{2\pi \cdot 16.75 \times 10^3} \right)^2} } = 4.5 = 13.06\,\text{dB} $$補償器が周波数幅内で設計されたら、受動素子の値を計算します。
ステップ4: 補償器の受動素子の設計
クロスレギュレーションを備えた電流制御モードのフライバックコンバータの安定化に使用される最も一般的なタイプII補償器は、フォトカプラフィードバックで構成されています (図3参照)。

図3: フォトカプラフィードバックで構成されたタイプII補償器
フォトカプラフィードバックに基づく補償器の伝達関数は、式(18)で推定できます。
$$ G_{\text{COMP}}(s) = - \frac{R_3}{R_D} \cdot \text{CTR} \cdot \frac{R_F}{R_1} \cdot \frac{1 + R_F C_F s}{s \left[ R_3 \left( C_{\text{FB}} \parallel C_{\text{OPTO}} \right) s + 1 \right]} $$中周波ゲインは、フォトカプラゲインと調整可能な電圧基準補償器ゲインの2つの段階で形成され、式(19)で計算されます。
$$ \left\| G_{\text{COMP}} \right\| = \frac{R_3}{R_D} \cdot \text{CTR} \cdot \frac{R_F}{R_1} $$フォトカプラに正しくバイアスをかけるには、最大抵抗を計算することが重要です。この抵抗は式(20)で推定できます。
$$ R_D \leq \frac{ \left( V_{OUT} - V_F - V_{\text{DZ1,MIN}} \right) \cdot R_3 \cdot \text{CTR}_{\text{MIN}} }{ V_{DD} - V_{\text{CE,SAT}} + \text{CTR}_{\text{MIN}} \cdot R_3 \cdot I_{\text{BIAS}} } $$Rを計算するために必要なパラメータRDは、フォトカプラおよび調整可能な電圧リファレンスのデータシートに記載されています。表2に、フォトカプラからのこれらのパラメータの標準値を示します。
表2: 主なフォトカプラパラメータ
| 入力パラメータ | 値 |
| 順方向電圧 (VF) | 1V |
| バイアス電流 (IBIAS) | 1mA |
| フォトカプラの最小電流伝達比 (CTRMIN) | 0.3 |
| フォトカプラ公称電流伝達比 (CTR) | 1 |
| コレクタエミッタ間飽和電圧 (VCE_SAT) | 0.2V |
| フォトカプラ出力容量 (COPTO) | 200pF |
表3は、調整可能な電圧リファレンスからのこれらのパラメータの標準値を示しています。
表3: 調整可能な電圧基準パラメータ
| 入力パラメータ | 値 |
| 最小基準電圧 (VDZ1_MIN) | 2.495V |
| フィードバック抵抗器 (R1) | 100kΩ |
| フィードバック抵抗器 (R2) | 26.3kΩ |
| 最大VFB | 3.9V |
上記のパラメータが取得されると、RDは式 (21) で計算できます。
$$ R_D \leq \frac{ \left( V_{OUT} - V_F - V_{\text{DZ1,MIN}} \right) \cdot R_3 \cdot \text{CTR}_{\text{MIN}} }{ V_{DD} - V_{\text{CE,SAT}} + \text{CTR}_{\text{MIN}} \cdot R_3 \cdot I_{\text{BIAS}} } \leq \frac{ (12 - 1 - 2.495) \cdot 12 \times 10^3 \cdot 0.3 }{ 3.9 - 0.2 + 0.3 \cdot 12 \times 10^3 \cdot 1 \times 10^{-3} } \leq 4.2\,\text{k}\Omega $$一度 R3 (この場合、R3はHF500-40コントローラの内部抵抗で、最小値は12kΩです) または、R1、R2、およびRD (ここでRだ = 2kΩ) の値が得られると、RFは式(22)で推定できます。
$$ R_F = \frac{G_{\text{COMP}}}{\dfrac{R_3}{R_D} \cdot \text{CTR}_{\text{NOM}}} \cdot R_1 = \frac{4.5}{\left( \dfrac{12 \times 10^3}{2 \times 10^3} \cdot 1 \right)} \cdot 100 \times 10^3 = 75\,\text{k}\Omega $$ここで、GCOMPは補償器の中周波ゲインであり、式(17)で計算されます。GCOMPは電源の帯域幅を調整するために使用されます。
反転ゼロと高周波極はすでに計算されているので、CFFBはそれぞれ式(23)と式(24)で計算できます。
(23)
$$ f_{z1} = \frac{1}{2\pi R_F C_F} \;\Rightarrow\; C_F = \frac{1}{2\pi R_F f_{z1}} = \frac{1}{2\pi \cdot 75 \times 10^3 \cdot 7.45} = 285\,\text{nF} $$(24)
$$ f_{P3} = \frac{1}{2\pi R_3 (C_{\text{FB}} \parallel C_{\text{OPTO}})} \;\Rightarrow\; C_{\text{FB}} = \frac{1}{2\pi f_{P3} R_3} - C_{\text{OPTO}} = \frac{1}{2\pi \cdot 16.75 \times 10^3 \cdot 12 \times 10^3} - 200 \times 10^{-12} = 592\,\text{pF} $$オープンループシステムと補償器が設計されると、ループゲイン伝達関数は式(25)で推定できます。
$$ G_{\text{TOTAL}}(s) = 38.2 \cdot \frac{ \left(1 - \frac{s}{2\pi \cdot 21.46 \times 10^3} \right) \left(1 + \frac{s}{2\pi \cdot 16.75 \times 10^3} \right) }{ \left(1 + \frac{s}{2\pi \cdot 74.5} \right) \left(1 + \frac{s}{2\pi \cdot 64.44 \times 10^3} \right) } \cdot \frac{ \left(1 + \frac{s}{2\pi \cdot 7.45} \right) }{ s \cdot \left( \frac{s}{2\pi \cdot 16.75 \times 10^3} + 1 \right) } $$式(25)は式(13)と式(18)に基づいています。
電源の安定性を確保するには、位相とゲインの余裕を計算することが重要です。
位相余裕は式(26)で計算できます。
$$ \gamma = 180^\circ - \tan^{-1} \left( \frac{\omega_{C,\text{NEW}}}{\omega_{\text{RHP}}} \right) - \tan^{-1} \left( \frac{\omega_{z1}}{\omega_{C,\text{NEW}}} \right) + \tan^{-1} \left( \frac{\omega_{C,\text{NEW}}}{\omega_{\text{HF}}} \right) - \tan^{-1} \left( \frac{\omega_{C,\text{NEW}}}{\omega_{P1}} \right) - \tan^{-1} \left( \frac{\omega_{C,\text{NEW}}}{\omega_{P2}} \right) - \tan^{-1} \left( \frac{\omega_{C,\text{NEW}}}{\omega_{P3}} \right) $$関連する値を入力した後、位相余裕は式(27)で計算できます。
$$ \gamma = 180^\circ - \tan^{-1} \left( \frac{6.5 \times 10^3}{21.46 \times 10^3} \right) - \tan^{-1} \left( \frac{7.45}{6.5 \times 10^3} \right) + \tan^{-1} \left( \frac{6.5 \times 10^3}{16.75 \times 10^3} \right) - \tan^{-1} \left( \frac{6.5 \times 10^3}{74.5} \right) - \tan^{-1} \left( \frac{6.5 \times 10^3}{64.44 \times 10^3} \right) - \tan^{-1} \left( \frac{6.5 \times 10^3}{16.75 \times 10^3} \right) = 68^\circ $$位相余裕が50°を超える場合、これは特定の規格に準拠するために必要な重要なパラメータです。
同時に、ゲイン余裕は式(28)で近似できます。
$$ \gamma = 180^\circ - \tan^{-1} \left( \frac{\omega}{21.46 \times 10^3} \right) - \tan^{-1} \left( \frac{7.45}{\omega} \right) + \tan^{-1} \left( \frac{\omega}{16.75 \times 10^3} \right) - \tan^{-1} \left( \frac{\omega}{74.5} \right) - $$ $$ \tan^{-1} \left( \frac{\omega}{66.44 \times 10^3} \right) - \tan^{-1} \left( \frac{\omega}{16.75 \times 10^3} \right) = 0^\circ \;\Rightarrow\; \omega = 37.84\,\text{kHz} $$式(29)は、指定された周波数における式(25)から導かれます。
$$ \left\| G_{\text{TOTAL}}(s) \right\| = 10^{\frac{38.2}{20}} \cdot \frac{ \sqrt{1 + \left( \frac{2\pi \cdot 37.84 \times 10^3}{2\pi \cdot 21.46 \times 10^3} \right)^2} \cdot \sqrt{1 + \left( \frac{2\pi \cdot 37.84 \times 10^3}{2\pi \cdot 16.75 \times 10^3} \right)^2} }{ \sqrt{1 + \left( \frac{2\pi \cdot 37.84 \times 10^3}{2\pi \cdot 74.5} \right)^2} \cdot \sqrt{1 + \left( \frac{2\pi \cdot 37.84 \times 10^3}{2\pi \cdot 66.44 \times 10^3} \right)^2} } \cdot \frac{ \sqrt{1 + \left( \frac{2\pi \cdot 7.5}{2\pi \cdot 37.84 \times 10^3} \right)^2} }{ \sqrt{1 + \left( \frac{2\pi \cdot 37.84 \times 10^3}{2\pi \cdot 16.75 \times 10^3} \right)^2} } $$ $$ \left\| G_{\text{TOTAL}}(s) \right\| = 0.282 \;\Rightarrow\; \left\| G_{\text{TOTAL}}(s) \right\|_{\text{dB}} = -11\,\text{dB} $$この状況で、ゲイン余裕は-10dB未満であり、これは特に規制仕様への準拠に関して考慮すべきもう1つの重要なパラメータです。結果が0dBに近い場合は、値を下げるために何らかの反復が必要になります。そうでない場合、パフォーマンスは最適にはなりません。この反復は、カットオフ周波数の値を減らすことから始める必要があります。
この完全な伝達関数は、以下の方法で電源の安定性と可能な限り最高のパフォーマンスを提供します。
- 定常誤差を最小限に抑えます。
- ESR寄生効果を最小限に抑えます。
- 電源の帯域幅を最大6.5kHzまで拡大します。
最終設計
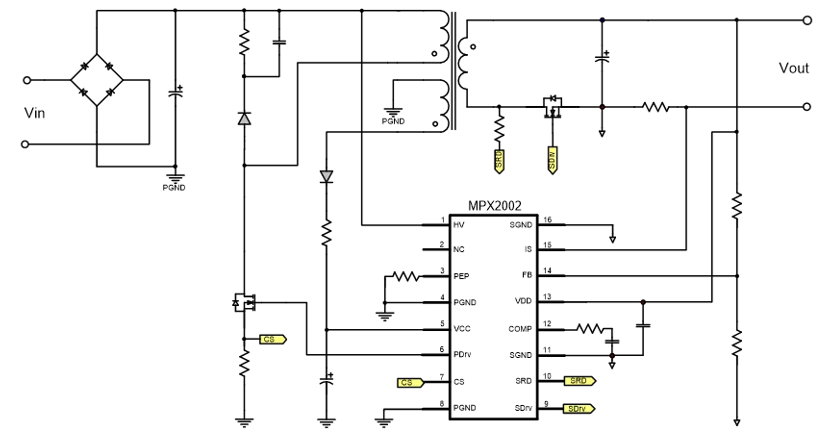
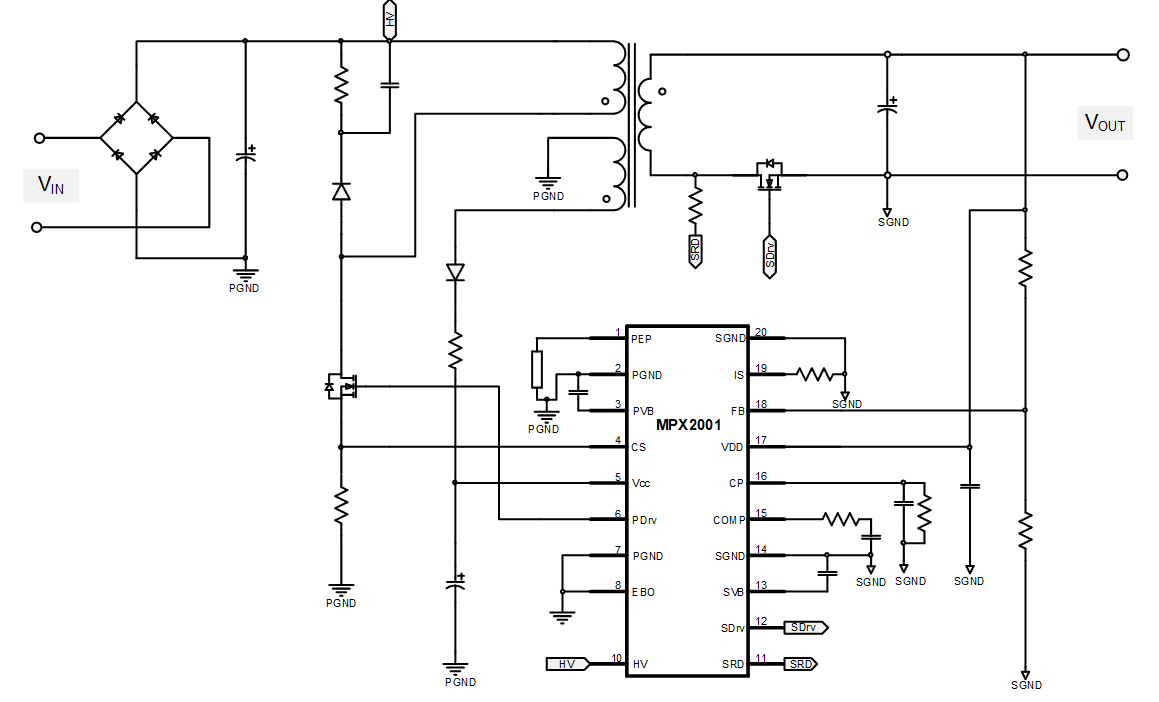
フィードバックループ補償器のすべての受動素子の値を計算し、コンバータの主なパラメータを決定した後、HF500-40を使用してフライバック全体を設計できます。図4は、計算されたすべてのパラメータを使用した回路の最終設計を示しています。
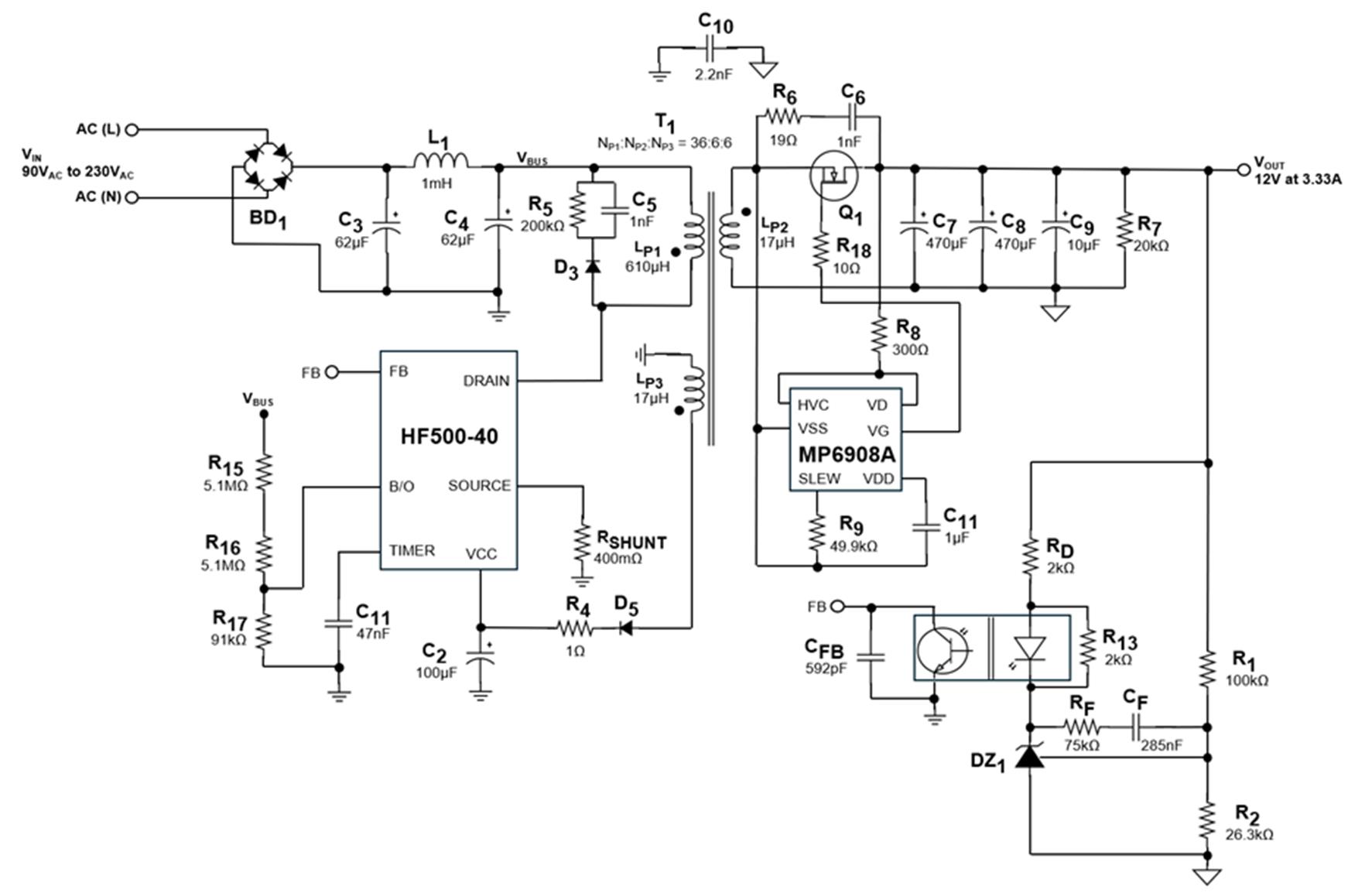
図4: 最終設計回路図
図5は、完全なループゲイン周波数応答のボード線図を示しています。
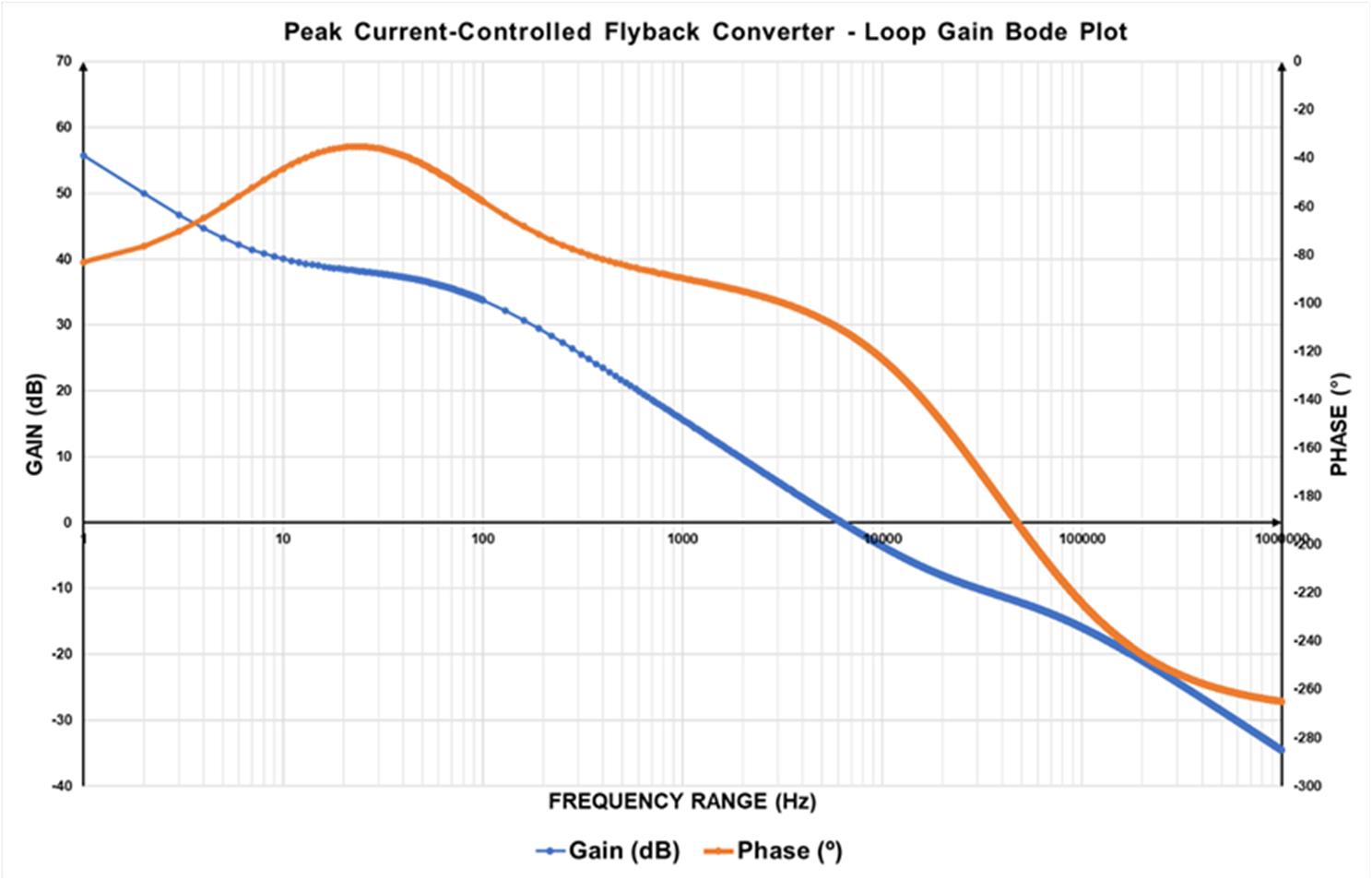
図5: 完全なループゲイン周波数応答のボード線図
結論
小信号解析によってフライバック平均モデルを取得することは、コンバータの伝達関数を最も正確に近似するための複雑なプロセスです。さらに、クロスレギュレーション技術には、フォトカプラフィードバックと調整可能な電圧リファレンスによる二次側レギュレーションが含まれるため、計算が複雑になります。
ただし、本稿で説明した4つの手順に従うと、最も負荷の大きい出力が直接調整されるため、電源のパフォーマンスを向上させる適切な近似値が得られます。これは、出力が負荷の変化に迅速に反応できることを意味します。このように、HF500-40を使用してフォトカプラフィードバック補償器を設計することは複雑なプロセスではありません。フライバックトポロジー設計を最適化するために、MPSの二次側レギュレーションのソリューションをご覧ください。
_______________________
興味のある内容でしたか? お役に立つ情報をメールでお届けします。今すぐ登録を!
アカウントにログイン
新しいアカウントを作成