磁気位置および角度センサ: 一般的な種類、主要部品、パラメータ、使用上の検討事項およびアプリケーション

はじめに
磁気位置および角度センサは、非接触、摩擦なし、およびセンシング機能を備えているため、さまざまな分野で広く使用されています。これらのデバイスにより、車載システムや産業オートメーションから家電製品や航空機に至るまで、さまざまなアプリケーションで直線変位と角度変位を測定できます。本ページでは、さまざまな種類の磁気センサの動作原理、パフォーマンスメトリクス、重要な部品、設計上の検討事項、およびアプリケーションについて説明します。
一般的な磁気センサの種類
磁気位置センサと角度エンコーダは、磁場と感知デバイスとの相互作用によって動作します。磁場は永久磁石または電磁石によって生成され、その強度はターゲットの位置または角度変位によって変化します。デバイス内のセンシング部品は磁場の変化を検出し、ターゲットの位置や角度に応じてそれを電気信号に変換します。
磁気位置センサと角度エンコーダは、さまざまなセンサ技術を使用して構築されており、それぞれに利点と欠点があります。ここでは、さまざまな種類の磁気センサとその基本的な動作原理について説明します。
誘導センサ
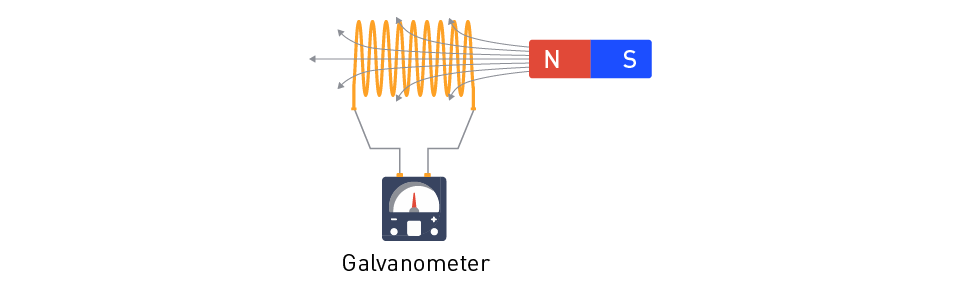
図1: コイルの動作原理
ファラデーの電磁誘導の法則に基づく誘導センサは、最も基本的なタイプの磁気センシングです。これは磁場の変化のみを検出できます。図1は誘導磁気センサコイルの動作を示しています。磁石をコイルに近づけると、コイル内の磁束密度が上昇し、誘導起電力 (emf) と誘導電流の形で反対の力が生じます。コイルの回転が止まると、磁束密度の変化も止まり、誘導起電力と電流も止まります。コイルの出力電圧は磁場の変化率に比例します。
誘導起電力を使用して計算できるのは、磁束密度の変化率とその方向のみです。磁場密度を計算するには機能統合が必要です。コイルの有用性は限定的ですが、他のセンサと組み合わせることで重要な機能を提供できます。
ホール効果センサ
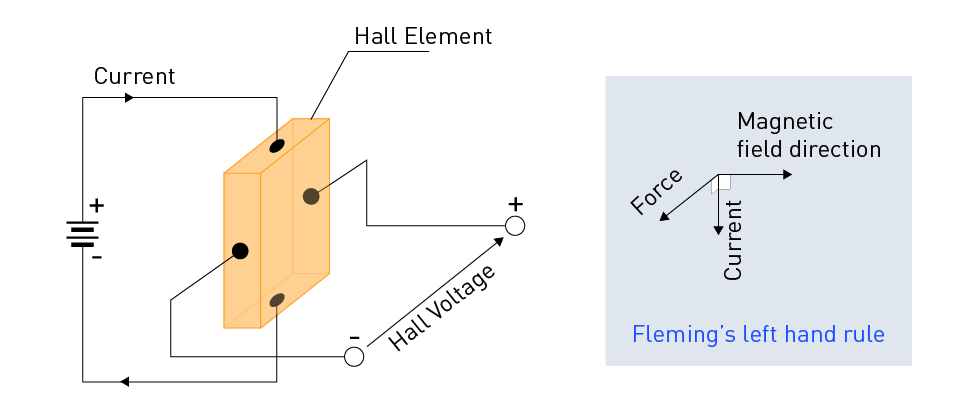
図2: ホール効果の原理
これらのセンサはホール効果に基づいており、電流が流れる導体の断面に磁場が加えられると、導体全体に電圧差が生じます (図2参照)。フレミングの左手の法則により、電流と磁場に直交して生成される起電力 (emf) の方向を計算できます。電流と磁場の大きさと相対角度により、ホール定数に比例するベクトル電圧が生成されます。
ホール効果センサは、他の種類に比べて感度と分解能が劣るものの、非常に安価で頑丈、かつホコリや汚れに強いという特徴があります。これらのセンサは、近接スイッチング、位置、速度検出、電流検知などのアプリケーションで使用されます。ホールセンサの大部分は、位置センサ (線形または角度) や非接触DCモータなどの車載アプリケーションで利用されています。
磁気抵抗 (MR) 素子センサ
磁気抵抗 (MR) 素子は、磁気センサのもう1つの主要な形式です。MR素子を横断して磁場が加えられると、その抵抗が変化します。異方性磁気抵抗素子 (AMR)、巨大磁気抵抗素子 (GMR)、トンネル磁気抵抗素子 (TMR) は、強磁性薄膜材料を使用する3つの一般的なMRセンサタイプです。これらのセンサはノイズレベルが低いため、ホール効果センサよりも優れた分解能と精度を頻繁に提供します。
異方性磁気抵抗 (AMR) センサ
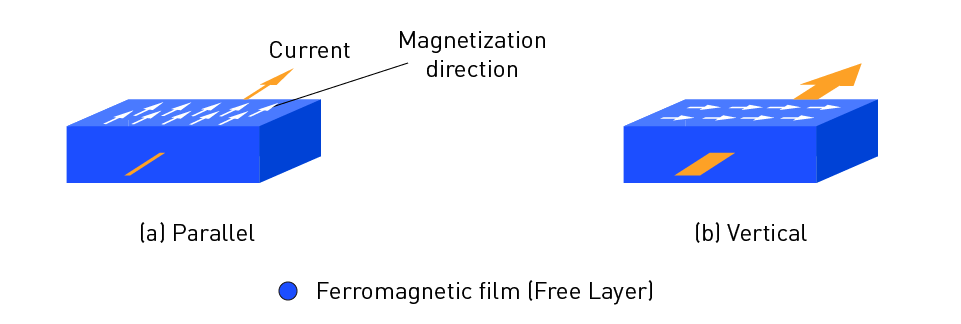
図3: AMRの動作原理
AMRセンサは、磁場にさらされたときの強磁性体の抵抗の変化を利用します。図3は、強磁性膜の磁化方向が電流方向と平行な場合と、磁化方向が電流方向と垂直な場合の電気変化の散乱度を示しています。その結果、抵抗値も変化します。
磁気抵抗比 (MR比) は、磁場の状態によって誘発される抵抗の変化率を表し、MRセンサの重要な指標です。AMRセンサ素子のMR比は約5%です。
AMRは構造がシンプルなため、磁気スイッチや回転センサによく利用されています。
巨大磁気抵抗 (GMR) センサ
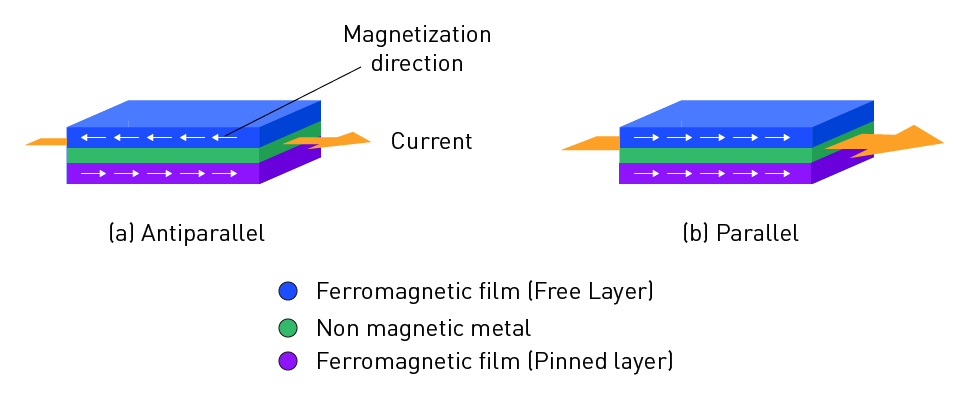
図4: GMRの動作原理
GMRセンサは、強磁性層と非磁性層が交互に積層された薄膜構造に基づいています (図4参照)。強磁性膜のピン止め層と自由層の磁化方向が逆平行か平行かによって電子の散乱率が変わります。このプロセスの結果として抵抗値が変化します。
GMRセンサ素子のMR比は約20%です。GMRセンサ素子は、感度が高いため、磁気ヘッド、回転センサ、その他のデバイスに使用されます。
トンネル磁気抵抗 (TMR) センサ
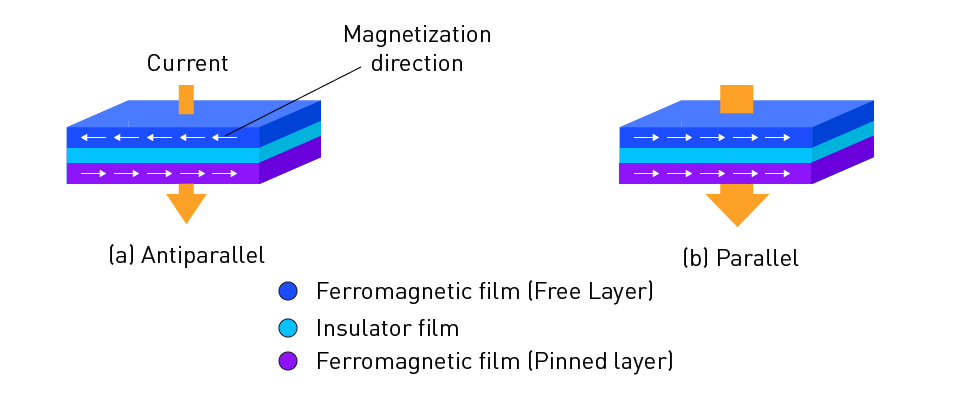
図5: TMRの動作原理
TMRセンサは、トンネル磁気抵抗の量子力学的現象を利用して磁場を検出します。図5は、積層した強磁性膜 (ピン止め層)、絶縁体膜、および強磁性膜 (自由層) で構成されるTMRセンサで利用される構造を示しています。絶縁体を通過する電子の割合はトンネル効果により変動します。その結果、ピン止め層と自由層の磁化方向が逆平行か平行かによって抵抗が変化します。
TMRのMR比は100%を超える場合があります。TMRは感度が高いため、ハードディスクの磁気ヘッドや高感度回転角度センサに最適な選択肢となっています。MRテクノロジーは、磁気ストレージ、位置および角度の検知、ナビゲーション、電流検知、非破壊モニタリング、バイオメディカル センシングシステムなど、幅広いアプリケーションで使用されています。
フラックスゲートセンサ
フラックスゲートセンサは、いくつもの利点をもつ伝統的なイノベーションです。これらは、高い感度と分解能を特徴としています。ただし、これらのセンサはかなり大きくなる場合があります。フラックスゲートセンサは小型化できることが実証されていますが、その結果、磁気分解能が低下します。これらのセンサでは、低周波信号によって変調、生成された交流信号が測定磁場に比例するため、ノイズとオフセットの削減が簡単になります。これらは、地球物理学や天文学、ウェアラブル電子機器、非破壊検査などで効果的に使用されています。
SQUID (超伝導量子干渉素子) センサ
SQUIDは、非常に高い感度を持つ超伝導ベースの磁場センサです。非常に高い分解能と精度を提供できますが、極低温が必要であることと、コストが高いことが制限となります。SQUIDセンサは、非常に小さな磁場、多くの場合は生体磁場をモニタするために使用されます。
その他の新興技術: 印刷センサやフレキシブルセンサなどの最近の開発も、特定のアプリケーションの要求に応え、潜在的なコスト、フォームファクタ、統合の利点を提供するために開発されています。
主要部品
磁気センサは、いくつかの主要部品で構成されており、これらがすべて連携して機能します。
永久磁石: これらはセンシングに必要な磁場を生成します。磁石の選択は、アプリケーションや磁石のサイズ、位置、形状、強度、温度安定性などの要因によって決まります。図6は角度エンコーダの磁石形状の例を示しています。
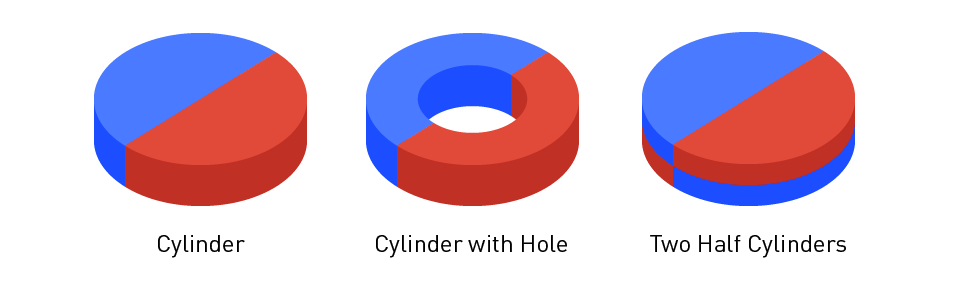
図6: 角度センサ用磁石形状の例
センシング素子: これらは磁場の変化を検知し、それを電気インパルスに変換します。センシング要素には、誘導センシング要素、ホール効果、磁気抵抗要素などがあり、それぞれに長所と短所があります。図1-5は、センサ部品が外部磁場にどのように反応するかを示しています。
信号調整および処理回路: この要素は、センシング要素の生の信号を分析し、ノイズをフィルタリングして、必要に応じて信号を増幅します。アナログからデジタルへの変換など、信号の変換も行います。
通信インタフェース: これにより、センサはマイクロコントローラやコンピュータなどの他のICと位置または角度データを交換できるようになります。一般的なインタフェースには、アナログ信号出力に加えて、アナログ出力、デジタル出力 (PWM、SPI、I2C など)、通信プロトコル (CANバス、イーサネットなど) が含まれます。
図7は、磁気角度センサのブロック図の例を示しています。
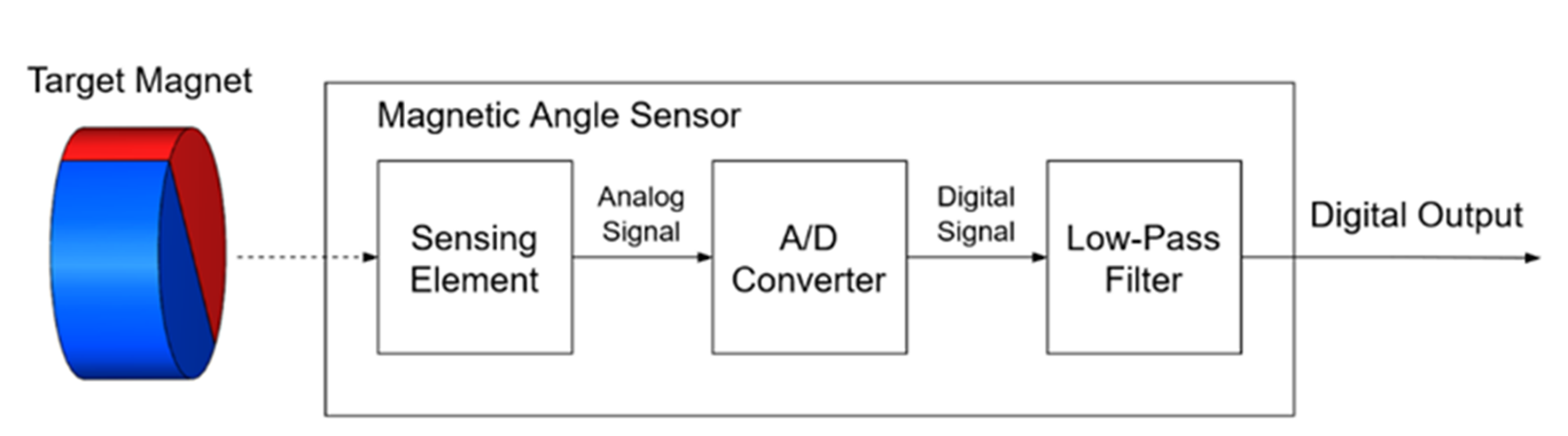
図7: 磁気角度センサのブロック図の例
パフォーマンスパラメータ
磁気位置センサと角度エンコーダを評価する際には、いくつかのパフォーマンス特性を考慮する必要があります。
感度: これは出力信号と入力信号の比として定義され、通常はより高い感度が望まれます。感度の度合いはセンサの感度定数に含まれます。感度定数は理想的には一定であるべきですが、測定される磁場に応じて変化する可能性があり、センサの直線性に影響を与えます。
直線性: 出力信号と入力信号の比例関係。精度を高めるには、MRセンサなどのセンサの非線形効果により、フィードバックなどの校正や補正が必要になる場合があります。
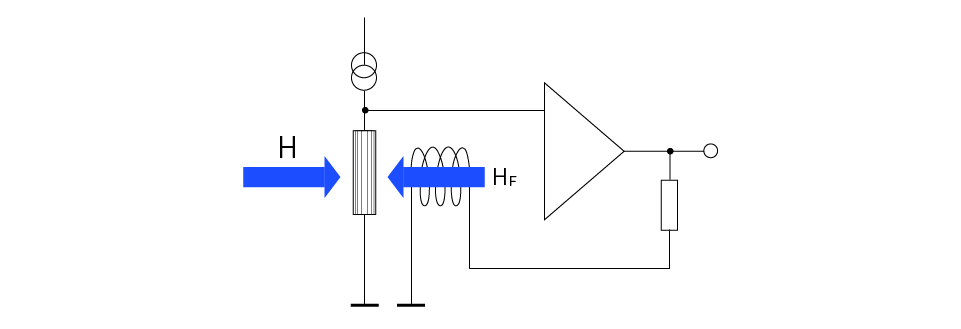
図8: フィードバックを利用した磁気センサの直線性の向上
図8は、磁気センサで磁場フィードバックがどのように使用されるかを示しています。磁気センサは特性が線形であるゼロ磁場幅で動作するため、ネガティブフィードバックを使用して線形性を回復できます。実際、フィードバック戦略を利用することで、あらゆる種類のセンサの範囲を拡張することが可能です。
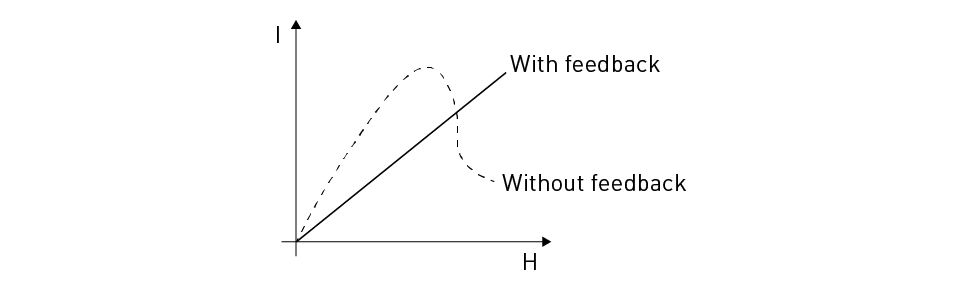
図9: フィードバックを用いた磁気センサの特性向上
図9は、フィードバックを導入することで磁気センサの特性がどのように回復されるかを示しています。
ヒステリシス: 強磁性体が磁化されると、磁化磁場が除去されると磁化はゼロに戻ります。実際に、これをゼロに戻すには、反対方向の磁場が必要です。同様に、交流磁場を適用すると、いわゆるヒステリシスループが形成されます。磁化曲線の再トレーサビリティの欠如はヒステリシスと呼ばれます。低いヒステリシスは、一定の読み取り値を提供し、精度を向上させるため、好まれることが多くあります。図10は代表的なヒステリシスループを示しています。
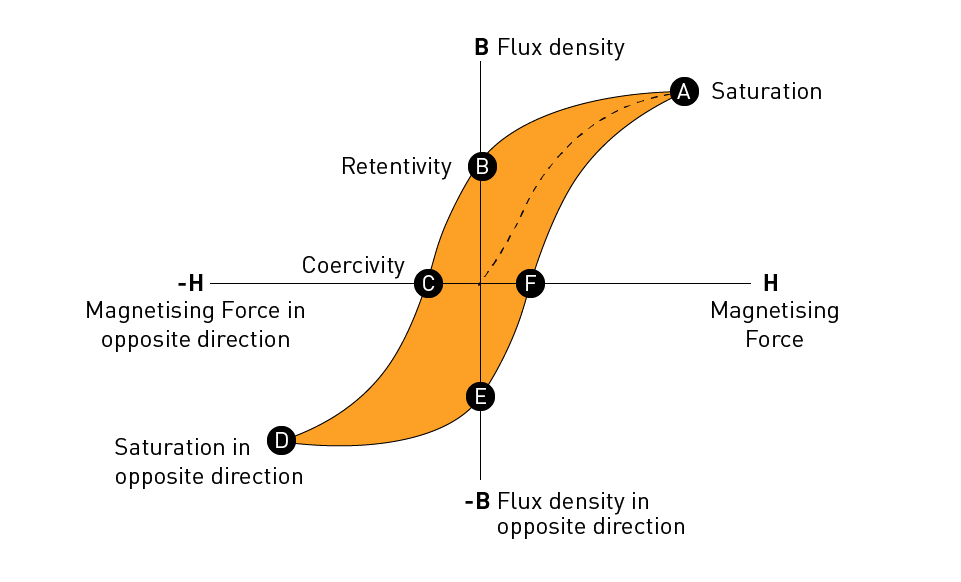
図10: ヒステリシスループの例
ノイズ: ノイズは磁気センサの重要な特性であり、多くの場合、パワースペクトル密度 (PSD) または変化によって表されます。図11は、さまざまな周波数におけるMRセンサとフラックスゲートセンサの一般的なPSD値を示しています。
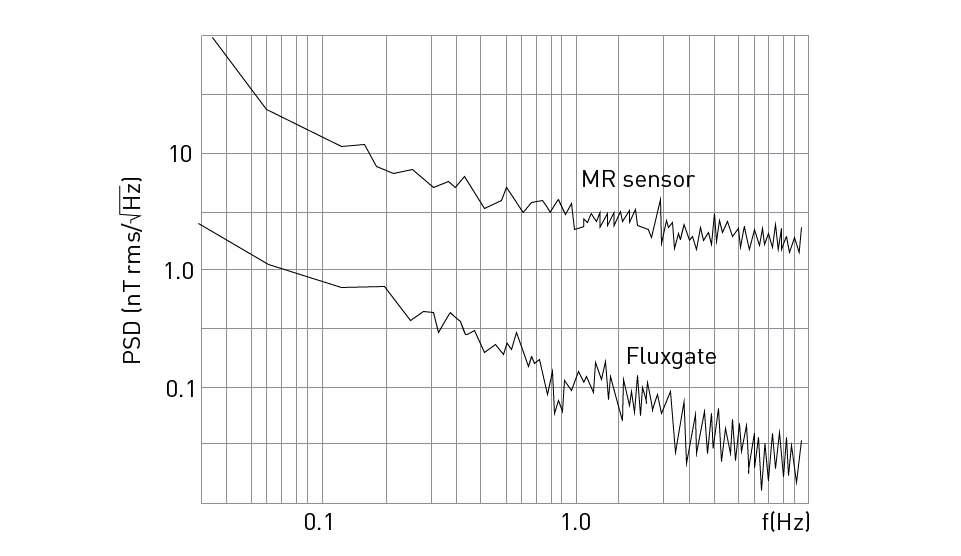
図11: MRセンサとフラックスゲートセンサのPSDの比較
抵抗 / 半導体ジャンクションなどの内部ノイズ源が一般的です。電子回路もノイズの程度に影響します。アナログとデジタルの両方の世界における信号処理技術を利用することで、ノイズの影響を軽減できます。たとえば、同期検出の考え方に基づいたロックインアンプを使用して、基準周波数に対応する信号のみを通過させることができます。図12は、フラックスゲートセンサ信号を処理するための、このようなアンプのセットアップを示しています。
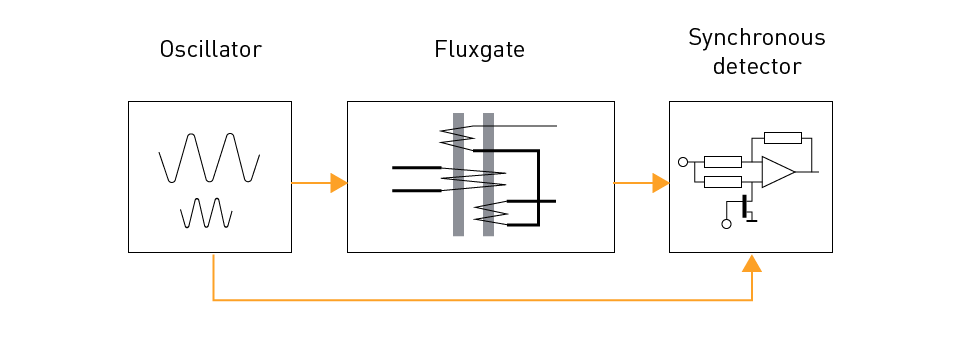
図12: 磁気センサ用ロックインアンプの使用
デジタルフィルタはノイズの処理にも使用できます。ただし、移動平均フィルタなどのフィルタリングでは信号の分析に時間がかかるため、センサの帯域を減少させる可能性があります。
測定オフセット: これはノイズと密接な関係のあるフレーズです。これは、温度ドリフトなど、同じ条件下で行われた多数の測定にわたって観測値が一貫性を保つようにする系統的なバイアスです。ブリッジ回路、差動アンプなどの差動技術を利用することでオフセットを低減できます。
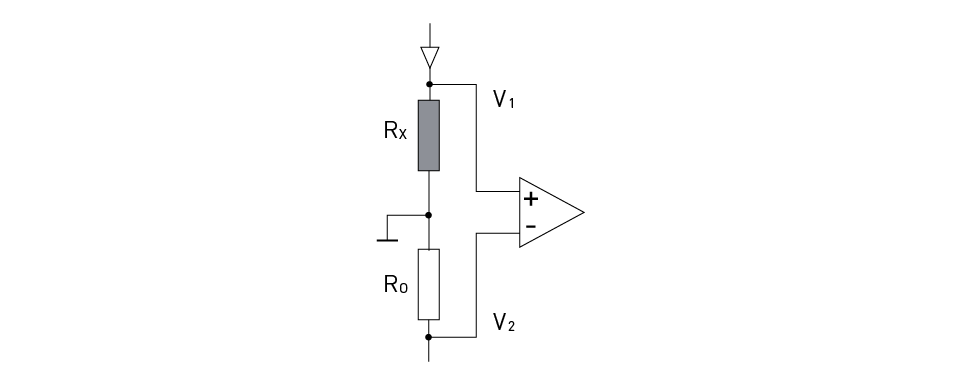
図13: 磁気センサのオフセットを軽減するための差動アンプの使用
図13は、差動アンプを使用して磁気センサのオフセットを低減する方法を示しています。Rxはアクティブセンサの抵抗を表し、R0は2番目のパッシブセンサの抵抗を表します。RxとR0に影響を与えることで、共通のオフセットの影響を軽減できます。差動出力では、出力電圧V1とV2をそれぞれの出力電圧として表し、式 (1) で計算できる出力電圧を使用することで、オフセットの影響を打ち消すことができます。さらに、デジタル信号処理技術を利用することでオフセットを低減できます。
$$V_{OUT} = K (V_1 - V_2)$$帯域幅: センサの性能を考えるときに忘れられがちな重要な特性の1つが、カットオフ周波数とも呼ばれる帯域幅です。センサの帯域幅は、センサが検出できる信号の周波数幅です。センサの帯域幅を超える周波数の信号は減衰されます。センサの完全な特性評価には、その伝達関数の分析またはグラフによる表現が必要になります。少なくとも、カットオフ周波数を指定する必要があります。よくある設計基準は、センサの出力フィルタ帯域幅 (センサの位置を決定する) が制御システムの帯域幅の少なくとも10倍である必要があるというものです。
分解能: センサの分解能は、ノイズに関連するもう1つの指標です。これは検出できる位置または角度の最も小さな変化です。より高解像度のセンサによって、より細かい動きや回転を検出できます。ノイズは信号レベルを曖昧でなくどれだけ効率的に識別できるかを決めるため、これはセンサのノイズによって制約を受けます。デジタル出力を持つセンサ分解能は通常、ビット単位で測定されます。磁気角度センサの分解能に関する追加情報については、クリックしてこの記事をお読みください。
遅延 / 応答時間: これは、センサが入力信号の変化に反応するまでにかかる時間として定義されます。反応時間が速くなり、待ち時間が短くなると、リアルタイムの制御とモニタリングが向上します。センシング時の遅延補正とエラー低減のための磁気センシングデバイスを設計できます。
温度範囲と安定性: センサの動作温度範囲と、その範囲全体で精度とパフォーマンスを維持する能力。温度は、実際にすべての磁気センサに影響を与えます。一方、温度補償センサは、適切な設計によって実現可能です。
使用上の検討事項
磁気位置センサまたは角度エンコーダに基づくシステムを設計する際には、いくつかの問題を検討する必要があります。
アプリケーション要件に基づくセンサの選択: 感度、直線性、分解能、帯域幅、温度範囲などの要素に応じて適切なセンサタイプを選択します。
磁石の選択と配置: 最高のパフォーマンスと精度を実現するには、適切な磁石の種類、サイズ、位置を選択します。
環境要因: 温度、湿度、振動を考慮してください。これらはすべてセンサのパフォーマンスと信頼性に影響を及ぼす可能性があります。
マイクロコントローラやその他の電子機器とのインタフェース : 他のシステム部品と簡単に統合できるように、適切なインタフェースを選択します。これらは、直接アナログ出力、または適切な通信リンクを使用したデジタル出力になります。
校正とテスト
磁気位置センサと角度エンコーダは、正確で信頼性の高い動作を保証するために、適切に校正およびテストする必要があります。
校正方法と手順: 非線形性を考慮して精度を高めるには、ゼロ点校正、ゲイン校正、曲線フィッティングなどの適切な校正手法を使用します。デジタルフィルタリング設定など、ユーザーが制御するその他の要素も適切に確立する必要があります。
精度、再現性、信頼性のテスト: 温度、湿度、振動など、さまざまな状況下でセンサの性能をテストします。一貫したパフォーマンスを保証するには、測定の再現性と長期的な信頼性を評価します。
アプリケーション
磁気位置センサと角度エンコーダは、以下を含む多くの分野で広く使用されています。
インテリジェント・トランスポーテーション
これらのセンサは、スロットル位置、ステアリング角度、ギア位置、サスペンション制御センサ、電動モータ制御などのアプリケーションで重要です。図14は、磁気角度センサを電動自転車で使用する方法を示しています。角度センサは、アイドルモードでのスロットルとギア変換器のウェイクオン角度検知を提供します。センサが角度または動きを検出すると、システムに割り込みを送信します。これにより、センサがトリガーされたときにのみシステムがイネーブルになるため、エネルギー管理が向上します。
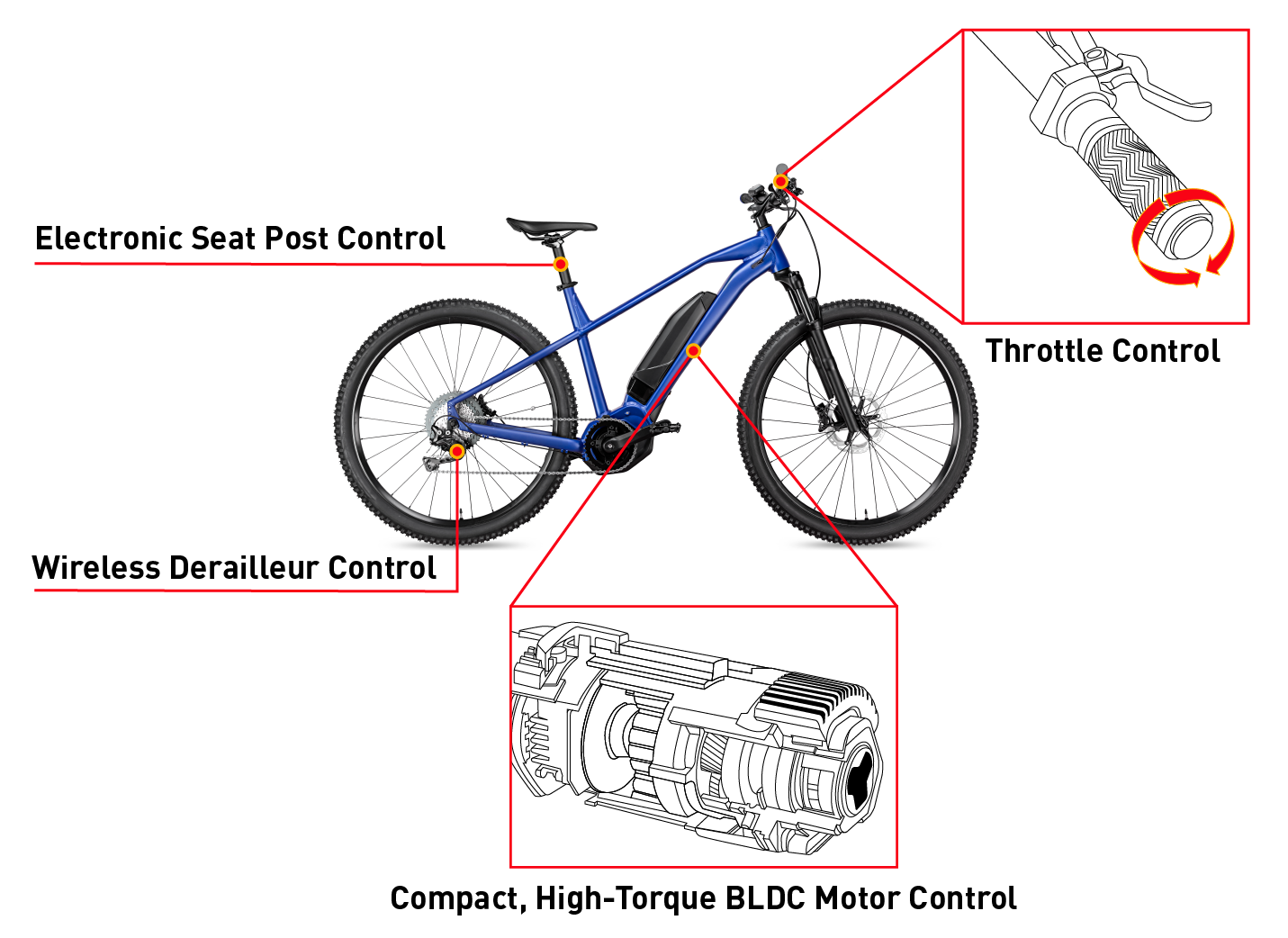
図14: インテリジェント・トランスポーテーションにおける磁気角度センサのアプリケーション
産業用オートメーション
産業用オートメーション: 磁気位置センサと角度エンコーダは、ロボット、コンベアシステム、リニアエンコーダとロータリーエンコーダ、自動製造装置における正確な位置決めと制御に使用されます。図15は、ロボットアームなどのロボットアプリケーションで磁気角度センサがどのように使用されるかを示しています。これにより、ロボット制御システムのドライブの位置を特定して、正確な動作制御が可能になります。
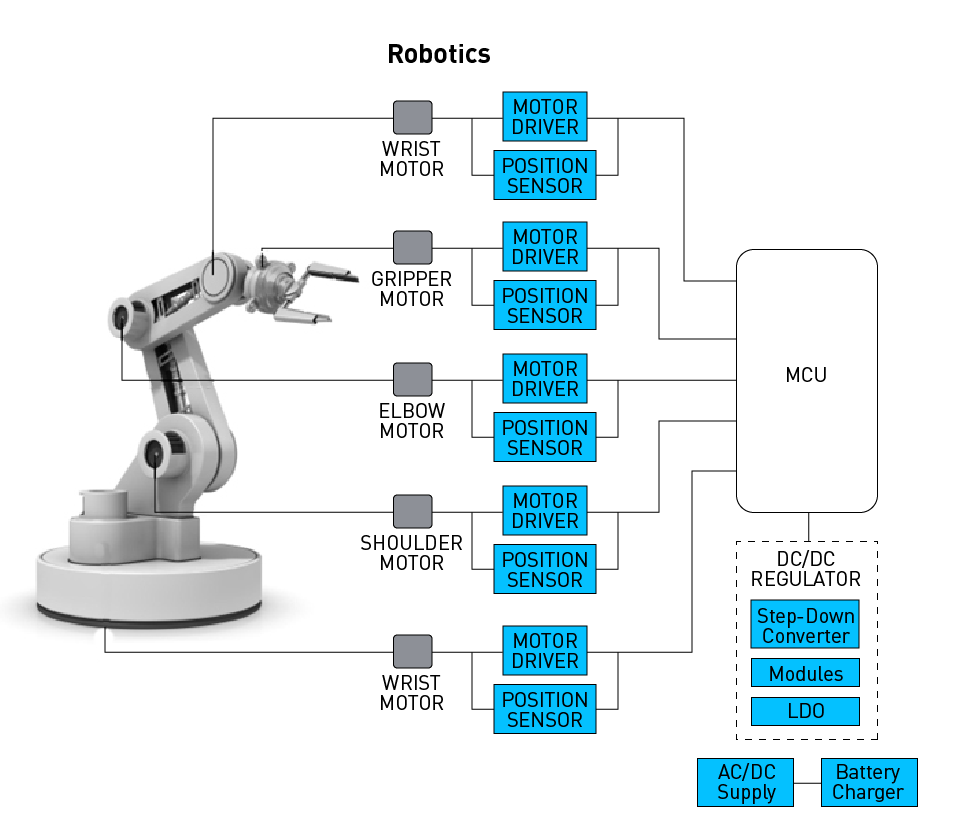
図15: ロボット工学における磁気角度センサのアプリケーション : ロボットアーム
家電製品
これらのセンサは、スマートフォン、タブレット、ゲーム機、ウェアラブル機器に内蔵されており、画面の回転、ジョイスティックの制御、モーショントラッキングなどのさまざまな機能を実現します。スマートフォンやタブレットの磁気角度センサについては、図17と図18をご参照ください。低消費電力、長いバッテリー寿命、最小限のソリューションサイズ、回転精度を備えた角度センサにより、折りたたみ式携帯電話のフレキシブルスクリーンが強化されます。ベゼルの従来の磁石方式とは対照的に、最新の角度センサはヒンジ側で正確な角度検出を可能にし、これは新しい折りたたみ式携帯電話の設計にとって重要です。
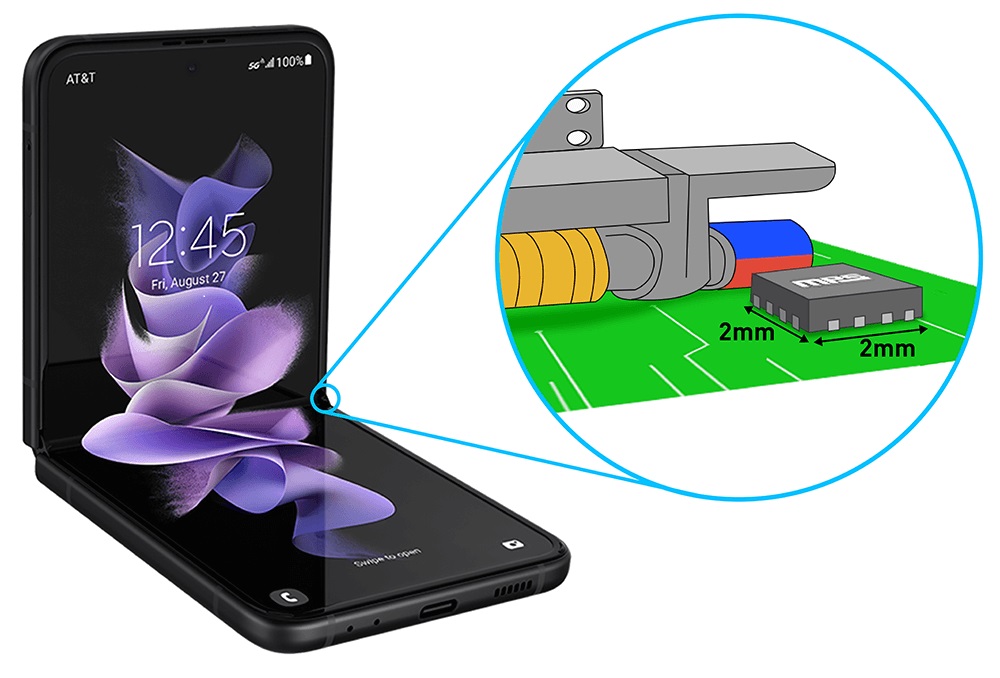
図16: 家電製品における磁気角度センサのアプリケーション : 折りたたみ式スマートフォン
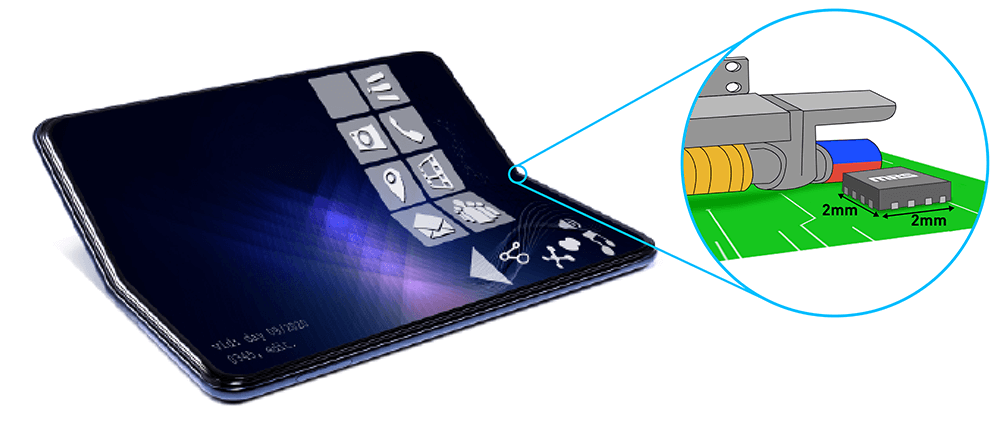
図17: 家電製品における磁気角度センサのアプリケーション : 折りたたみ式タブレット
産業用電子機器
磁気位置センサと角度エンコーダは、コンベアベルト、回転装置、プロセスプラントなど、さまざまな産業用電子機器で使用されています。図19は、ドリルマシンなどの角度センサの産業アプリケーションを示しています。特定の角度精度でモータを整流するには、磁気角度センサが必要です。図20は、磁気位置センサを使用してラックギアの位置を評価し、特定の場所からどれだけ移動したかを判断する方法を示しています。

図18: モータ制御産業アプリケーションにおける磁気角度センサのアプリケーション : ドリルマシン
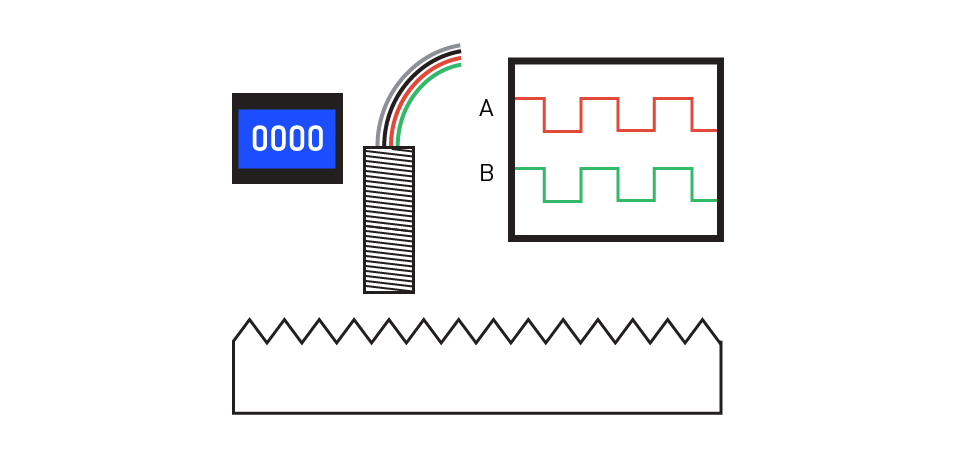
図19: 産業アプリケーションにおける磁気位置センサのアプリケーションラックギアの位置検出
結論
磁気位置センサと磁気角度エンコーダは、さまざまな業界のさまざまなアプリケーションで使用されています。このページでは、動作原理、広く使用されている種類、主要部品、パフォーマンス特性、使用上の懸念、およびアプリケーションの概要を記載しました。テクノロジーが進歩するにつれ、センサの性能、新しいセンサテクノロジー、およびアプリケーションの拡大において大きな発展が期待されます。
MPSのセンサは、角度動作制御および位置検知アプリケーションに最先端のパフォーマンスと適応性を提供します。磁気エンコーダの詳細については、角度位置センサのページをご覧ください。
_______________________
興味のある内容でしたか? お役に立つ情報をメールでお届けします。今すぐ登録を!
アカウントにログイン
新しいアカウントを作成