Optimizing Automotive Applications with Zero-Delay PWM Control (ZDPTM)

Get valuable resources straight to your inbox - sent out once per month
We value your privacy
Introduction
The increasingly high power consumption for rails in advanced driver-assistance systems (ADAS) and digital cockpit applications calls for an improved control scheme from traditional control methods (e.g. peak current mode control), with a need for excellent load transient performance and low on-time capabilities. While constant-on-time (COT) control can be utilized as a control scheme, its varied frequency operation makes it unsuitable for EMI-sensitive automotive environments.
This article presents zero-delay pulse-width modulation (PWM) control (ZDPTM), which is MPS’s proprietary, fixed-frequency power supply control method that provides improved dynamic performance compared to peak current mode control while maintaining fixed-frequency operation.
Zero-Delay Pulse-Width Modulation (PWM) Control (ZDPTM) Architecture
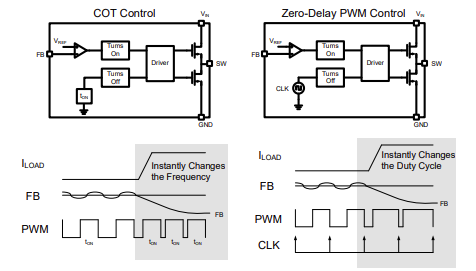
At a high level, the design of ZDPTM integrates typical blocks from traditional COT and peak current mode control schemes (see Figure 1).

Figure 1: Zero-Delay PWM (ZDPTM) Control Scheme
Like in a traditional COT scheme, ZDPTM bypasses the error amplifier (EA) by connecting the feedback node directly to the PWM comparator, creating a fast path to the PWM comparator. This fast path quickly changes the duty cycle that drives the high-side MOSFET (HS-FET) and low-side MOSFET (LS-FET) to compensate for output voltage (VOUT) fluctuations without ramping the compensation up and down.
For example, if VOUT drops due to a large load transient, then the duty cycle increases during the next on cycle to provide power to the output capacitors, which recover VOUT. ZDPTM recovers VOUT without adjusting the switching frequency (fSW), as its PWM latch is reset by a fixed-frequency signal.
Based on traditional peak current mode control, ZDPTM provides a slow path through the EA to improve regulation accuracy. The slow path uses the difference between the feedback voltage and reference voltage (VFB - VREF) to create an error signal. The error signal is then combined with an AC coupled current signal and slope compensation ramp.
The sum of the error signal, AC coupled current signal, and slope compensation ramp is compared to VFB, which feeds into a PWM latch block that uses a fixed-frequency clock as the reset signal. ZDPTM loop stability can only be achieved with type 2 compensation. This reduces design cycle time compared to type 3 compensation.
Compared to peak current mode control, ZDPTM features valley current sensing in its architecture to detect the inductor current (IL). Peak current mode control senses IL on its upward slope when the HS-FET turns on, while valley current sensing detects IL on its downward slope when the LS-FET turns on. Using valley current sensing with ZDPTM, a lower minimum on time (tON_MIN) can be achieved, as the current-sense block is not limited to the blanking time that constrains peak current sensing. This allows ZDPTM to operate at a lower duty cycle and a higher fSW, which are required to step down the 12V automotive battery voltage to the operating supply level used in systems-on-chip (SoCs).
Related Content
-
APPLICATION NOTE
Zero-Delay Pulse-Width Modulation Control (ZDPTM)
This application note details Zero-Delay Pulse-Width Modulation (PWM) control (ZDPTM).
-
VIDEO

Zero-Delay PWM (ZDP): How It Works, Advantages, and Applications
This tech talk provides an overview of MPS's zero-delay PWM (ZDP) technology, which improves on previous control methods like peak current mode control.
-
USE CASE
Smart Diode Controller IC Use Case: Advanced Driver-Assistance Systems (ADAS)
This use case examines the application of the MPQ5850-AEC1 in advanced driver assistance systems (ADAS).
-
ARTICLE
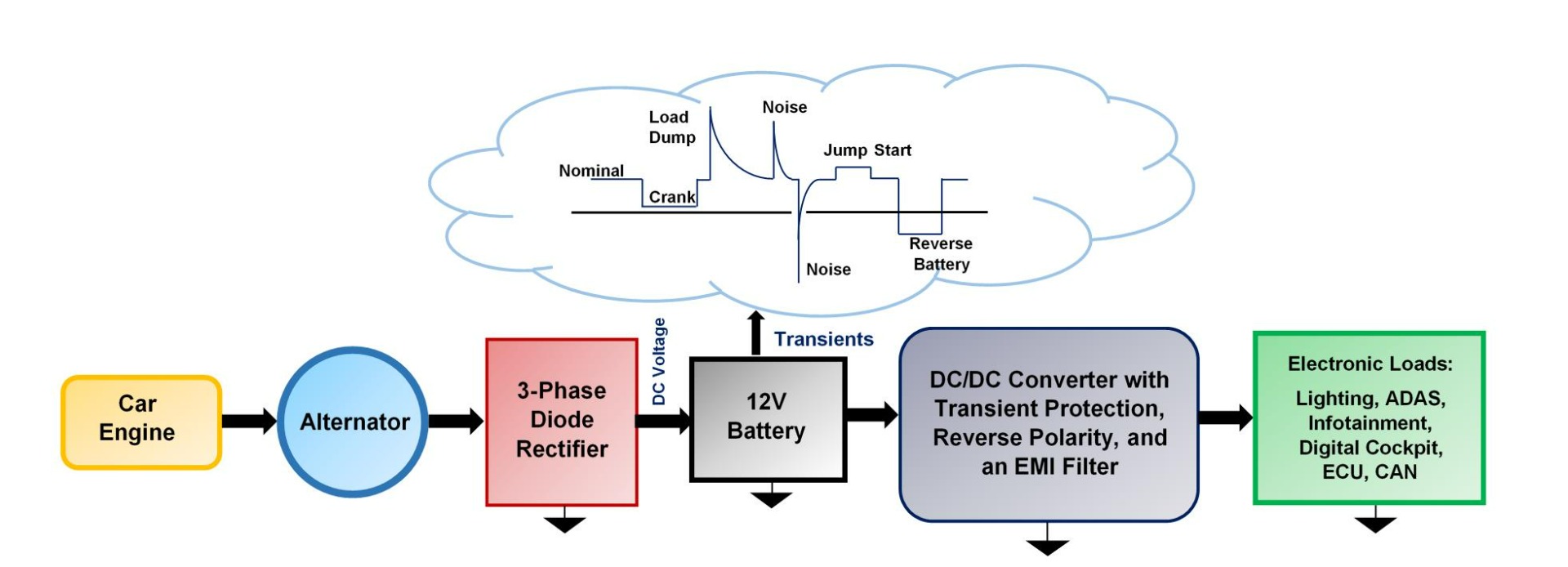
From Cold Crank to Load Dump: A Primer on Automotive Transients
This article introduces common automotive transient conditions (e.g. reverse battery, cold crank, warm crank, and load dump), and discusses the causes of these transients in addition to system design challenges.
Simulation Results (1)
The load transient response simulation results of a ZDPTM device provide further insights into its architecture (see Figure 2).
Figure 2: ZDPTM Simulated Load Transient Response
The simulation results show the inputs of the PWM comparator (PWM- and PWM+) and the process to trigger the high-side gate (HSG) on and off. Based on Figure 1, PWM- comes directly from the feedback, and PWM+ is the sum of IL, the slope compensation, and the EA output. If PWM+ exceeds PWM-, then the HSG turns on (see Figure 3) and is terminated by the fixed-frequency clock that resets the gate driver.
Note:
1) VIN = 12V, VOUT = 3.3V, 0A to 4A load step at 5A/µs, fSW = 2.2MHz, L = 1µH, COUT = 2 x 22µF, and the capacitor voltage derating is simulated and tested on the MPQ4340-AEC1.
Figure 3: HSG Turns On during ZDPTM Load Transient Response
VOUT initially drops when the load steps up from 0A to 4A, causing PWM- to drop proportionally. PWM+ then exceeds PWM- for a longer time than during steady state. This increases the duty cycle to correct VOUT from the load step. Since PWM+ bypasses the EA, the duty cycle increases immediately after VOUT fluctuates without changing fSW (see Figure 4).
Figure 4: Duty Cycle during ZDPTM Load Transient Response
The green trace in Figure 4 represents the duty cycle (in %). Within a couple of switching cycles, the duty cycle increases from 27% to 35%. This causes VOUT (represented by the red trace in Figure 4) to quickly return to its regulated 3.3V level. The HSG (represented by the blue trace in Figure 4) confirms that fSW remains constant during a load transient, demonstrating ZDPTM fixed-frequency operation.
Hardware Results (2)
Fast load transient response during fixed-frequency operation is achieved with ZDPTM through the hardware results and advantages of MPS devices. For example, the MPQ4340-AEC1 is a synchronous buck converter that features a ZDPTM control scheme. The converter is designed for off-battery automotive applications, where switching regulators require fixed-frequency operation for stringent EMI environments. Its load transient performance corresponds with Figure 4, where fSW stays constant and the duty cycle changes instantaneously when VOUT droops due to a load step (see Figure 5).
Figure 5: MPQ4340-AEC1 Load Transient Response
When compared to a traditional control scheme (e.g. peak current mode control), ZDPTM excels in load transient performance, making it a significantly more suitable control scheme compared to peak current mode control for quick performance with minimal component costs.
To demonstrate this, we will compare two similar products with different control architectures. Figure 6 shows a 0A to 3.5A load transient comparison between ZDPTM (using the MPQ4340-AEC1) and a traditional automotive peak current mode control device. Both devices are tested using the same inductor, number of output capacitors, and fSW.
Figure 6: Peak Current Mode Control vs. ZDPTM Load Transient Response
Note:
2) VIN = 12V, VOUT = 3.3V, 0A to 3.5A load step at 2A/µs, fSW = 2.2MHz, L = 1µH, and COUT = 2 x 22µF. Tested using the MPQ4340GLE-33-AEC1 and a generic automotive peak current mode device.
The load transient response results in Figure 6 underline the significant improvement achieved using ZDPTM architecture compared to peak current mode control architecture. For the same load step, the peak current mode device’s VOUT fluctuation was 523mVPK-PK, while the MPQ4340-AEC1 was 170mVPK-PK.
The ZDPTM transient advantage also reduces the overall power solution cost since fewer output capacitors can be used compared to traditional control architecture.
The MPQ4340-AEC1 utilizes the benefits of ZDPTM architecture to achieve a low tON_MIN, down to 20ns (typical) and a maximum of 35ns. By contrast, the peak current mode device has a typical tON_MIN of 80ns. A lower tON_MIN allows the ZDPTM device to step down its automotive battery supply voltage (up to 18V under nominal operating conditions) to voltage levels suitable to supply SoCs (as low as 1.8V) while maintaining a high fSW above the AM band, such as 2.2MHz.
The EMI results of the MPQ4340-AEC1 with ZDPTM demonstrate its compatibility for strict EMC environments that automotive applications frequently encounter. These results also illustrate that ZDPTM can use frequency spread spectrum (FSS) to further enable the solution to pass EMI requirements with standard input and output filters (see Figure 7).
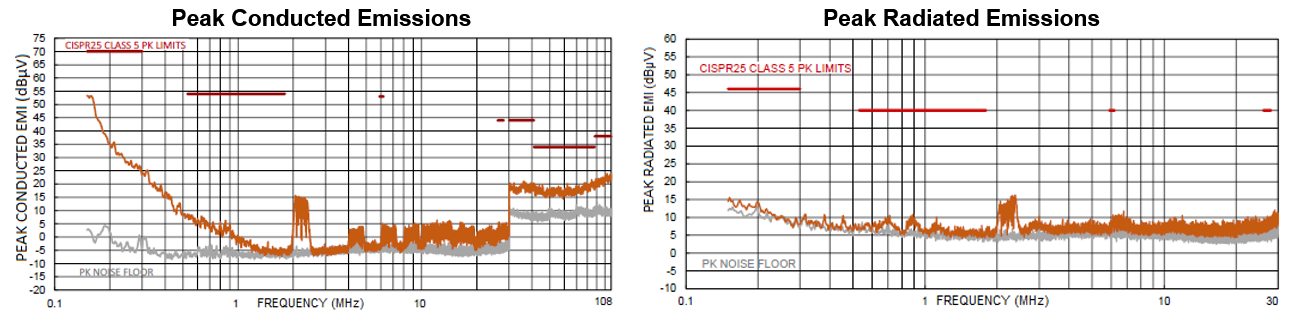
Figure 7: MPQ4340-AEC1 EMI Results (3)
Note:
3) The EMC test results are based on the typical application circuit with EMI filters (refer to the MPQ4340-AEC1 datasheet for more details).
Conclusion
Zero-delay PWM control (ZDPTM) optimizes the requirements of switching regulators in modern automotive applications. Products with ZDPTM can meet the fast transient specifications that are required for SoCs in ADAS and digital cockpit applications while still minimizing costs. By using fixed-frequency operation, ZDPTM is well-suited for EMI-sensitive automotive environments. Furthermore, the valley current sensing feature of ZDPTM allows for large VIN-to-VOUT ratios with high fSW due to a low tON_MIN.
MPS offers a robust portfolio of automotive-qualified products using ZDPTM, such as the MPQ4340-AEC1 and MPQ4371-AEC1.
_______________________
Did you find this interesting? Get valuable resources straight to your inbox - sent out once per month!
Technical Forum
 Latest activity 3 hours ago
Latest activity 3 hours ago
 2 Comments
Latest activity a day ago
2 Comments
Latest activity 2 weeks ago
3 Comments
2 Comments
Latest activity a day ago
2 Comments
Latest activity 2 weeks ago
3 Comments
Log in to your account
Create New Account