AN192 - ゼロ遅延パルス幅変調制御 (ZDPTM)

役立つ情報を毎月お届けします
プライバシーを尊重します
概要
本アプリケーションノートでは、ゼロ遅延パルス幅変調 (PWM) 制御 (ZDPTM) について詳しく説明します。ZDPTMは、MPS独自の固定周波数電源制御方式であり、一般的な固定周波数制御方式 (電圧モード制御やピーク電流モード制御など)と比較して過渡応答を向上させることができます。
はじめに
MPSのゼロ遅延PWM (ZDPTM) 制御は、高速過渡応答や安定したスイッチング周波数 (fSW) など、電源設計に多くの利点をもたらします。ZDPTMと比較するための基準値を確立するために、いくつかの一般的な制御トポロジー (電圧モード制御、電流モード制御、およびコンスタント オン時間 [COT] 制御) について説明します。それからZDPTMとその利点についても詳しく説明します。
従来の制御方法
電圧モード制御
電圧モード制御は、最も単純な制御方法の1つです。図1に電圧モード制御を示します。
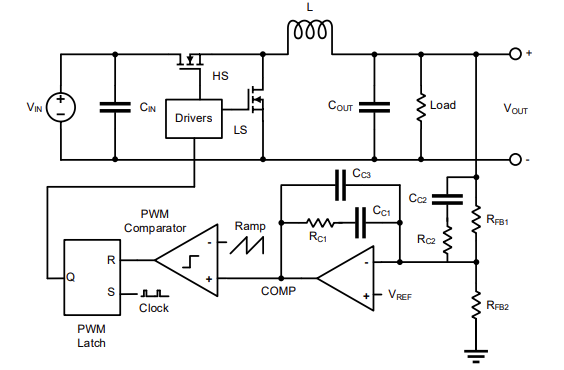
図1 : 電圧モード制御
フィードバック電圧と基準電圧の差 (VFB - VREF) を増幅して誤差信号 (通常は補償電圧) を生成します。この誤差信号がランプ電圧と比較されて、電力段のデューティサイクルが生成されます。電圧モード制御では、システムを安定させるために高ESRコンデンサまたはタイプ3補償が必要です。制御ゲインも入力電圧 (VIN) に比例します。これにより、VINが変化するとクロスオーバー周波数がします。これを回避するには、ランプ電圧をVINに比例させる必要があります。
ピーク電流モード制御
ピーク電流モード制御は、車載用電源に使用される最も一般的な制御方法の1つです。図2は、ピーク電流モード制御を示しています。
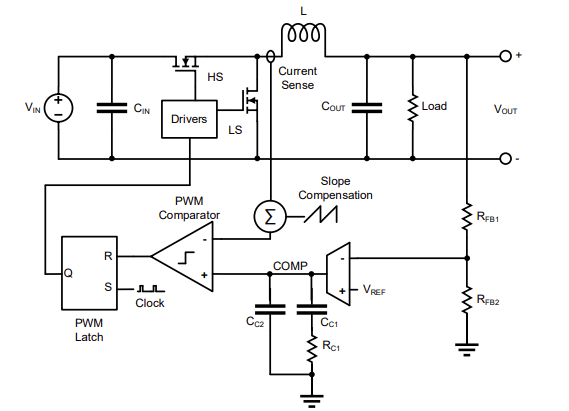
図2 : ピーク電流モード制御
電圧モード制御と同様、VFB - VREFの誤差信号を生成するために増幅されます。ピーク電流モード制御は、この誤差信号をインダクタ電流 (IL) と比較されます。これは通常、ミラーMOSFET、検出抵抗、または無損失電流検出回路を介して検出されます。通常、ピーク電流モードトポロジーには、50%を超える安定したデューティサイクルを確保するためのスロープ補償信号が含まれます。検出したILを取りこむことで、 ループでは補償の複雑さが減少し、タイプ2の補償だけで済むようになります。これは、制御ゲインのVINへの影響も除去し、クロスオーバー周波数がVIN範囲全体で比較的一定のままになります。
電流信号は、スイッチング遷移中のピーク電流モードトポロジーでは安定しないため、ハイサイドMOSFET (HS-FET) がオンになると、PWMコンパレータを短時間ブランキングする必要があります。これにより、電圧モード制御、従来のCOT、またはZDPTM比べて、最小オン時間 (tON_MIN) が長くなります。
ピーク電流モード制御は、MPQ2167、MPQ4436、MPQ4323、MPQ4430などのMPSデバイスに実装されています。
従来のコンスタントオンタイム (COT) 制御
高性能アプリケーションでは、過渡性能を向上するために従来のCOT制御が使用されます。図3は、従来のCOT制御を示しています。
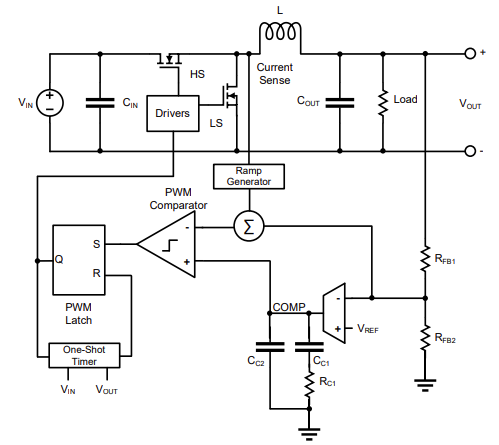
図3 : 従来のCOT制御
従来のCOT制御はVFBとVREFを直接比較して、オンパルスをトリガーします。これは、フィードバック信号のリップルがILと同相である場合にのみ可能です。これは、出力コンデンサのESR、インダクタの両端にあるランプ注入回路、または内部で生成された合成ランプに起因する場合があります。VFBがVREFまたは誤差信号を下回る場合、オンタイムパルスが生成され、ゲートドライバに供給されます。大きな過渡現象時には,内部で最小のオフタイムで連続したオンタイムパルスを生成し,出力電圧 (VOUT) を素早く回復します。これにより、電圧モード制御や電流モード制御に比べて負荷過渡応答が向上します。
エラーアンプ (EA) は、VFBを低速パスとして使用して誤差信号を生成でき、レギュレーション精度を向上します。従来のCOT制御は、タイプ2の補償で実現できます。これにより、COTトポロジーを持つシステムの部品数が削減されます。
負荷過渡応答中に連続オン時間パルスが発生する可能性があるため、fSWは動作中、一時的に増加します。これは、システム内のクロストークを低減するために厳しいEMI要件を持つ産業用またはカーエレクトロニクスなど、EMI性能がより重要なアプリケーションには適していない場合があります。
COT制御は、MPQ2179、MPQ2172、MPQ3431AなどのMPSデバイスに実装されています。
ゼロ遅延PWM制御 (ZDPTM)
アーキテクチャ
ゼロ遅延PWM (ZDPTM) 制御は、固定周波数方式で、従来のCOT制御と同じ負荷過渡性能を実現します。図4にZDPTMを示します。
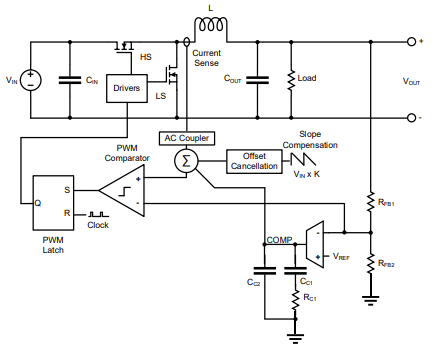
図4 : ゼロ遅延PWM (ZDPTM) 制御
従来のCOT制御と同様に、ZDPTMフィードバックノードを直接PWMコンパレータに接続してEAをバイパスし、PWMコンパレータへの高速パスを作成します。この高速パスは、HS-FETとローサイドMOSFET (LS-FET) を駆動するデューティサイクルをすばやく変更して、保障を増減することなく、VOUTの変動を補償します。たとえば、VOUTを減らす場合、 大きな負荷過渡が原因でデューティサイクルが減少すると、次のサイクル中にデューティサイクルが増加し、出力コンデンサに電力を供給してVOUTを回復します。ZDPTMは、fSW調整せずにこれを達成します (図5参照)。
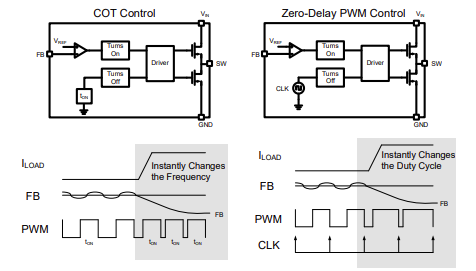
図5 : 従来のCOT制御とZDPTMの比較
従来のCOT制御と同様に、EAを使用した低速パスにより、レギュレーションの精度が向上します。低速パスでは (VFB - VREF) を使用して、誤差信号を作成します。この信号は、AC結合電流信号およびスロープ補償ランプと加算されます。次に、加算された信号をVFBと比較して、固定周波数クロックをリセット信号として使用するPWMラッチブロックに供給します。ZDPTMループの安定性はタイプ2の補償で達成でき、タイプ3の補償と比較して設計サイクル時間を節約できます。
ZDPTMはバレー電流検出も実装しています。ピーク電流モード制御とは異なり、ZDPTMによるバレー電流検出はLS-FETがオンになると電流を検出できるため、ブランキング時間は必要ありません。ブランキング時間をなくすことにより、より低いtON_MINを達成できます。これにより、より低いVIN : VOUT比、および、より高いfSWのため、デバイスをより低いデューティサイクルで動作させられます。
ZDPTMは、MPQ4340、MPQ4371、MPQ2286などのMPSのデバイスに実装されています。
シミュレーション結果 (1)
図6は、MPQ4340の負荷過渡シミュレーションの結果を示しています。
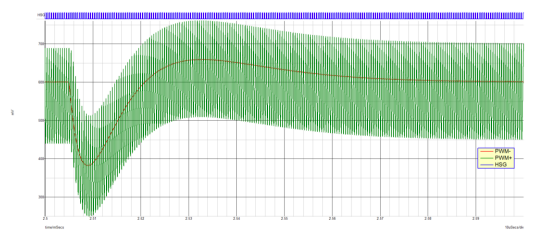
図6 : MPQ4340の負荷過渡応答
ここで、PWM-はフィードバック信号です。PWM+は、comp信号、AC結合電流検出、およびスロープ補償の合計です。そしてHSGはハイサイドゲートのスタートアップ信号です。
VOUTは、出力負荷が0Aから4Aに変化することによって生じるアンダーシュートとわずかな低周波オーバーシュートの後、すぐに回復します。このVOUTの回復はPWM-に比例します。
PWM+がPWM-を超えると、HSGがオンになります (図7参照)。
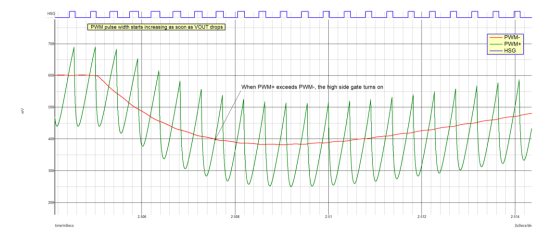
図7 : MPQ4340の負荷過渡応答中にHSGがオンになる
一度VOUTが低下すると、HSGパルス幅が増加して出力により多くのエネルギーを供給し、負荷ステップの後にVOUTを修正します。
図8は、一定のfSWを維持しながら、負荷が増加するとデューティサイクルがどのように変化するかを示しています (図8参照)。
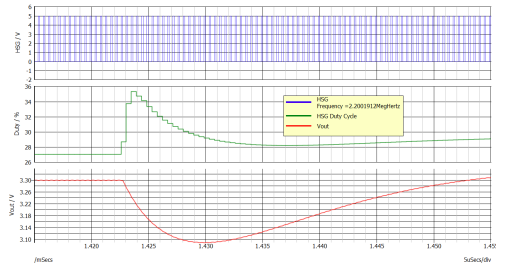
図8 : MPQ4340の負荷過渡応答中のデューティサイクル
図8の緑色の曲線は、7ページの図6および図7に示されているHSG曲線のデューティサイクル (%) を表しています。数回のスイッチングサイクルでデューティサイクルが27%から35%に増加し、VOUTの垂下 (負荷の増加によって起きる) を減らし、VOUTが素早く回復可能になります。図8の青い曲線は、負荷過渡動作中の一定のfSW (2.2MHz) でのHSGを表しています。
ボード線図のシミュレーションを、制御スキームの安定性を観察するために作成します (図9参照)。
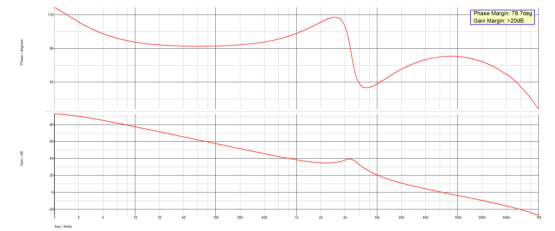
図9 : MPQ4340のボード線図
位相余裕とゲイン余裕は、ほとんどの設計目標を超えています。クロスオーバー周波数は約63kHzです。高速パスにより、大信号過渡応答は、63kHzのクロスオーバー周波数で予想されるものよりもすぐれています。従来のCOT制御でよく見られるように、従来のピーク電流モード制御デバイスのボード線図と比較すると、ボード線図では向上した負荷過渡応答が正確に反映されていません。
注 :
1) VIN = 12V、VOUT = 3.3V、50A/µsで0Aから4Aへの負荷ステップ、fSW = 2.2MHz、L = 1µH, COUT = 2 x 22µFで、コンデンサ電圧ディレーティングはMPQ4340上でシミュレートされ、テストされています。
利点
他の固定周波数制御方法 (電圧モード制御やピーク電流モード制御など) と比較して、ゼロ遅延PWM (ZDPTM) 制御の高速パスは、過渡応答を大幅に向上します。図10は、ZDPTM (MPQ4340) およびピーク電流モード制御 (MPQ4430) 間の0A~3.5Aへの負荷過渡の比較を示しています。MPQ4340とMPQ4430のインダクタ、コンデンサ、および fSWは同じです。
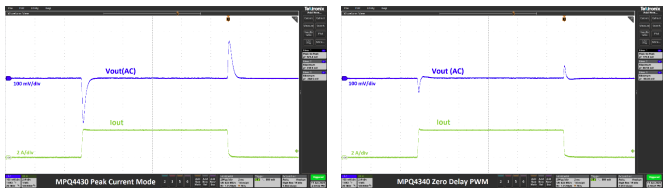
図10 : ZDPTMM vs. ピーク電流モード制御による過渡負荷
波形は、MPQ4430の523mVPK-PKの負荷過渡およびMPQ4340の170mVPK-PKの負荷過渡を示しています。MPQ4340の過渡応答は、MPQ4430の過渡応答よりも大幅にすぐれています。これにより、過渡性能を向上しながら、使用する出力コンデンサの数を減らすことができます。
バレー電流により、非常に短いtON_MINが可能になります。ピーク電流モード制御を使用するデバイスのtON_MINは60ns~100nsの間になることができますが、MPQ4340の最長tON_MINはわずか35nsです。これにより、MPQ4340は拡張された車載用バッテリ電圧 (最大18V) を直接18Vに変換し、AM帯域を超えて周波数スペクトル拡散 (FSS) でスイッチングすることができます。
固定周波数により、ZDPTMはすぐれた周波数安定性を提供可能です。ZDPTMを備えたデバイス (MPQ4340など) は、外部クロックに同期したり、FSSと併用したりできます。ZDPTMは車載用アプリケーションなど、厳しいEMC要件を持つアプリケーションで使用可能です。
結論
ゼロ遅延PWM (ZDPTM) 制御は、従来のピーク電流モード制御と比較して負荷過渡性能を向上し、負荷過渡時に固定周波数も維持します。固定周波数により、ZDPTMはfSWが変動する従来のCOT制御から一線を画しています。ZDPTMは、tON_MINが短いため、デバイスが高いfSWと低デューティ・サイクルが望まれるアプリケーションで使用できます。これらの利点は、ZDPTMを使用したMPS製品のシミュレーションとハードウェアテストによって証明されています。
_______________________
興味のある内容でしたか? お役に立つ情報をメールでお届けします。今すぐ登録を!
アカウントにログイン
新しいアカウントを作成