DCモータ・ドライバでの電流調整の使用

役立つ情報を毎月お届けします
プライバシーを尊重します
はじめに
DCモータを始動するとき、モータ・ドライバと電源に負担をかける大電流が必要になる場合があります。
本稿では、モノリシックパワーシステムズ (MPS) の例を使用して大電流状態に対処しながら、多くのモータ・ドライバICに集積された電流調整機能の使用について説明します。多くの場合、電流調整を使用すると、設計者はより小さなモータ・ドライバICを使用できます。
簡単にするために、すべての例でブラシ付きDCモータを使用していますが、本稿で説明するプロセスは、ブラシレスDC (BLDC) モータシステムにも適用できます。
DCモータの基本
電流制限とレギュレーションについて説明する前に、DCモータがどのように動作するかを考慮することが重要です。
最も単純なDCモータは、抵抗と直列の電圧 (逆起電力 (EMF) と呼ばれる) としてモデル化できます (図1を参照)。逆起電力はモータによって生成される電圧であり、モータ速度に比例します。直列抵抗は、単に巻線のDC抵抗です。

図1 : DCモータ電気モデル
モータに電流が流れると、モータが作り出す回転力であるトルクが発生します。
モータに印加される機械的負荷が存在せずモータに電圧 (VSRC) が印加される場合、モータが回転し、バックEMF (VBEMF) がVSRCと同じレベルに上昇するまで加速します。この時点では、電流は流れていません。トルクがシャフトに印加されると、モータはVSRCとVBEMFの間に電圧差を生成しながら、VBEMFが低下する原因となります。この電圧差により、ソースから流れる電流 ((VSRC - VBEMF) / RS) が生成されます。
これは単純化された理想的な近似であることに注意してください。実際には、損失があり、ソースから常にいくらかの電流が流れています。
モータの始動
モータが停止しているとき、VBEMFは0Vです。図1は、最初にモータに電圧を印加したとき、電流がモータの直列抵抗によってのみ制限されることを示しています。この抵抗は通常非常に小さいため、モータが回転し始めるまで大電流が流れます。電流は通常、モータの定格連続電流よりもはるかに大きくなります。図2は、小型のDCモータを示しています。
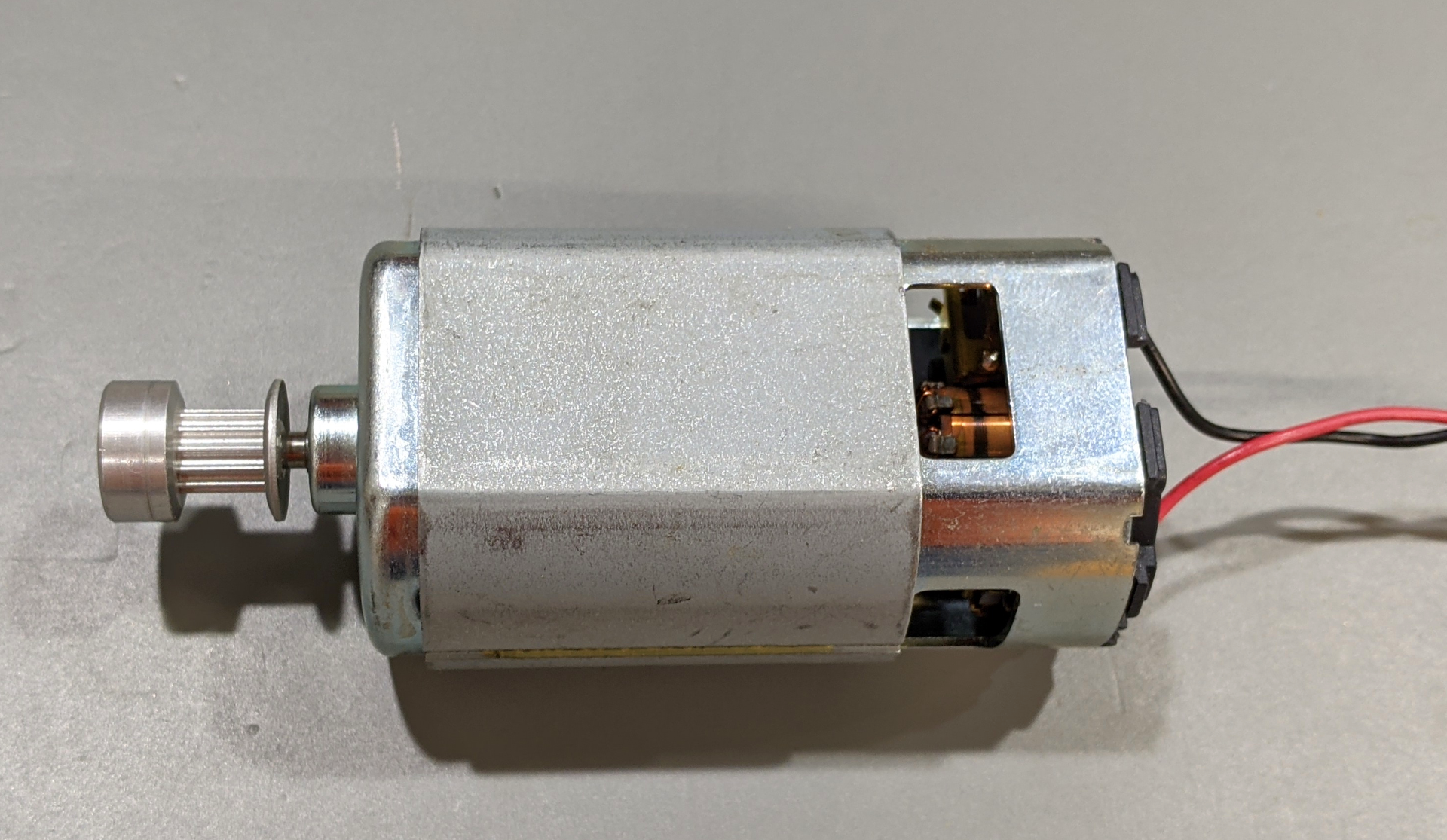
図2 : 小型DCモータ
表1にモータの仕様を示します。
表1 : 小型DCモータの仕様
| パラメータ | 値 | 単位 |
| 出力電力 | 15 | W |
| 公称電圧 (VSRC) | 12 | V |
| 無負荷速度 | 4000 | rpm |
| 負荷電流 | 0.11 | A |
| 全負荷速度 | 2920 | rpm |
| 全負荷連続トルク | 50 | mNm |
| 全負荷連続電流 | 1.25 | A |
| 始動トルク | 190 | mNm |
| 始動電流 | 3.3 | A |
| 抵抗 (RS) | 3.6 | Ω |
表1に、最大許容連続トルク負荷に対応する1.25Aでの公称定格連続電流を示します。この値を使用すると、モータ・ドライバは1.25Aの最大電流をサポートするだけでよいと考えるかもしれません。ただし、始動電流 (モータ停止時の公称電圧でのモータを流れる電流) は3.3Aです。つまり、モータ・ドライバは、モータを回転させるために始動電流を駆動できるか、そうでなければ、電流制限をし、モータをソフトスタートさせる必要があります。そうしないと、モータ・ドライバが過電流保護 (OCP) 機能をアクティブにする可能性があります。OCPを提供しないデバイスは損傷する可能性があります。
さらに、モータを始動するために必要な大電流には、この大電流をサポートできる電源が必要です。バッテリ駆動のシステムでは、限られた持続時間であっても、大電流パルスを引き出すことによってバッテリ寿命が短くなるため、モータの起動時に電流を制限することが有益です。
モータ・ドライバの電流調整
多くのモータ・ドライバICには、何らかの形の電流制限または電流調整が含まれています。
モータ・ドライバICの例は、Hブリッジモータ・ドライバであるMPSのMP6522です (図3を参照)。モータ電流は、2つのローサイドMOSFET (LS-FET) の電流を検出することにより、IC内部で測定されます。この測定は、電流調整回路によって使用されます。
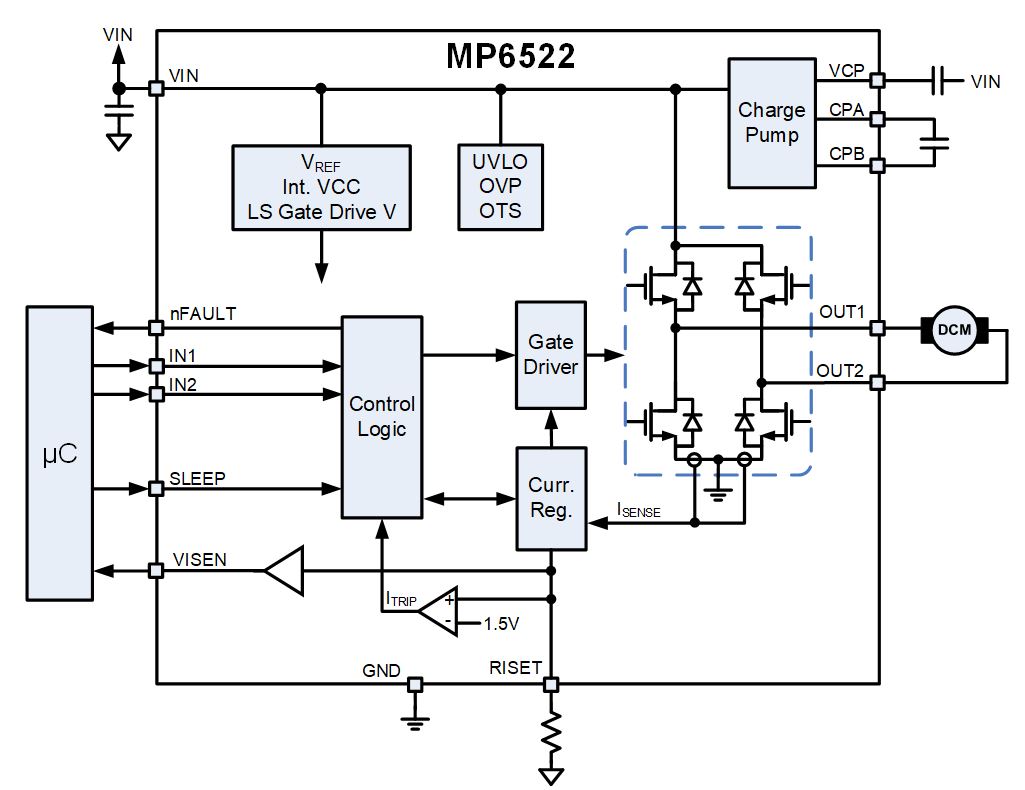
図3:MP6522 機能ブロック図
測定された電流は、RISETピンの小さな外部抵抗によって電圧にスケーリングされます。この電圧はモータ電流に比例します。電流が1.5Vに達すると、MP6522はモータ電流を一定時間オフにしてから、再度有効にします。
モータには大きなインダクタンスがあります。電流調整を使用してモータを駆動する場合、電流はHブリッジがオンのときに上昇し、現在のトリップポイントに到達すると下降し、ドライバは電流をオフにします。その結果、電流波形は三角形になります。図4は、三角形の電流波形を緑色のトレースとして示しています。この波形は、電流が約1.5AのピークでMP6522によって調整されていることを示しています。
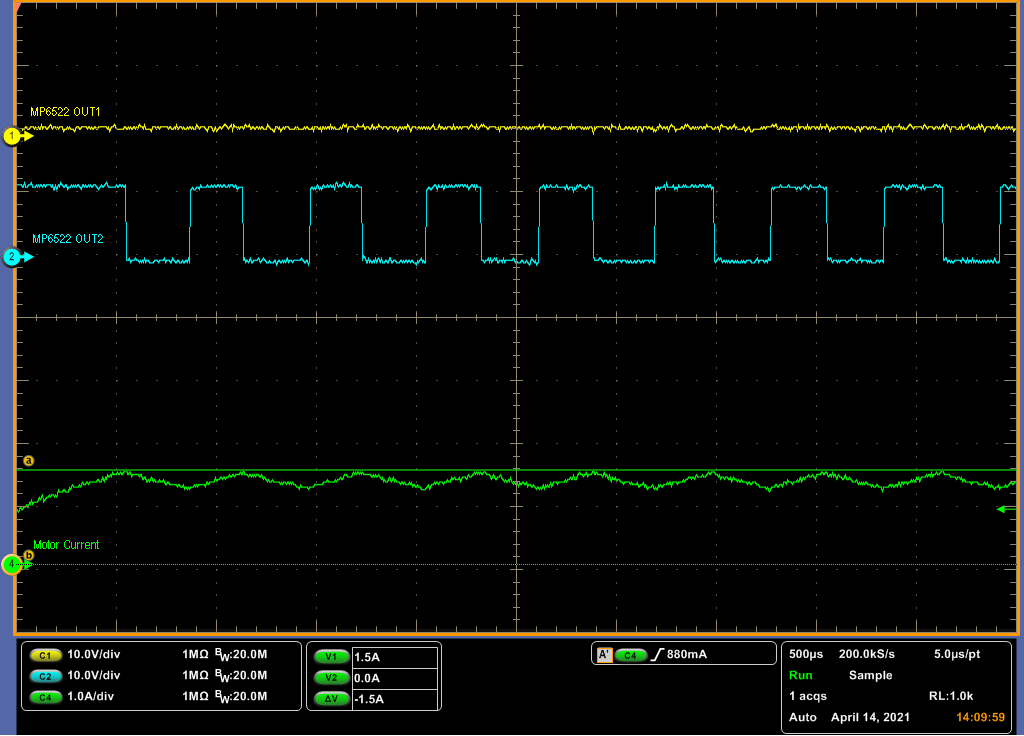
図4 : 入力電流調整
モータ始動 (ストール) 電流
MP6522は、上記の小型DCモータを駆動するために使用できます。電流調整がなく (RISET抵抗=0Ω)、12V電源がある場合、モータを始動するには約3.6Aのピーク電流が必要です (図5を参照)。
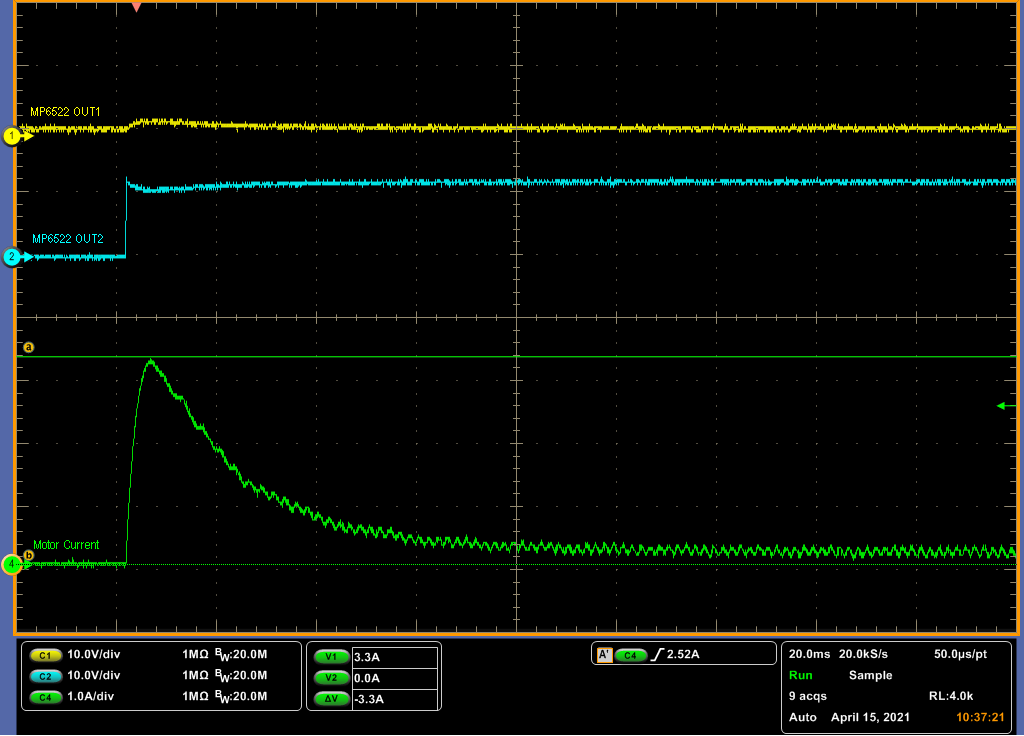
図5 : モータ始動電流
電流が横ばいになると、モータはフルスピードに達します。このシナリオでは、モータがフルスピードに達するまでに約50msかかります。
モータが回転しているときの波形の電流リップルは、モータの転流によるものであることに注意してください。モータが回転すると、整流子は1つのセグメントから次のセグメントに移動し、電流を次の巻線に転送します。これらの遷移の間、電流は常にわずかに上下します。これはモータ・ドライバとは関係ありません。
電流調整を使用して始動電流を制限する
RISET抵抗を10kΩに設定することにより、MP6522は1.5Aの電流制限を提供するように設定できます。図6は、出力がオンとオフになり、DCモータを流れる電流を制限することを示しています。
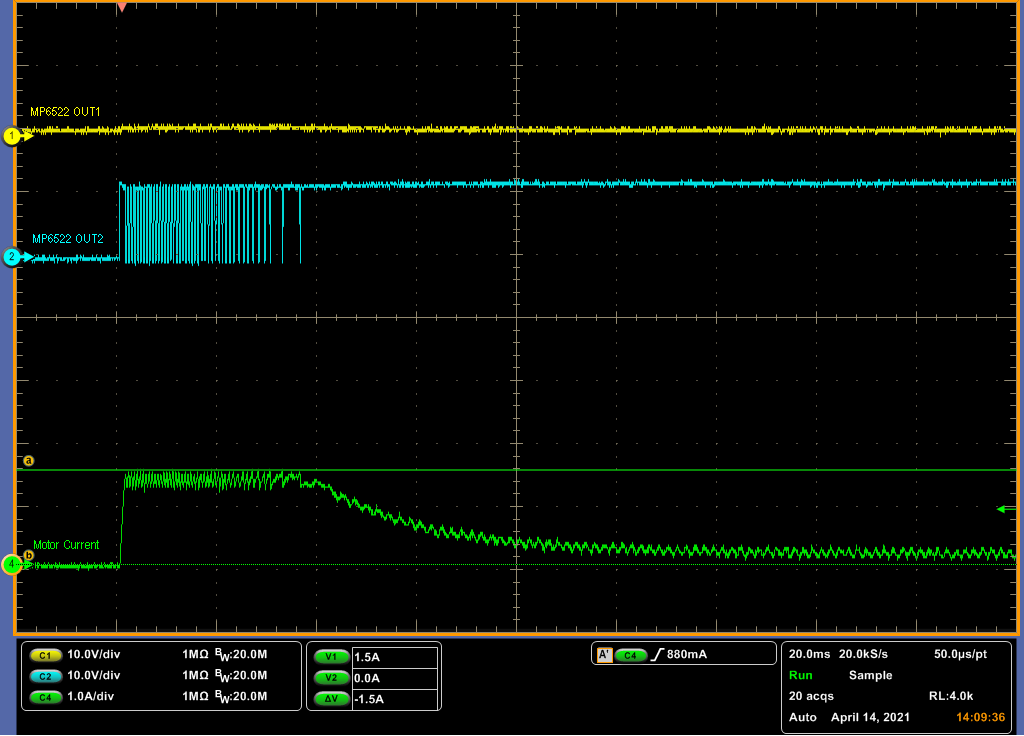
図6 : 1.5Aで調整された電流
電流制限なしでモータが50msでフルスピードに達する方法と比較すると、このシナリオではモータがフルスピードに達するのに80msかかります。
機械的な考慮事項
電流はモータにかかるトルクに比例するため、起動時にモータ電流を制限するとトルクも制限されます。トルクはモータを停止から最終速度まで加速するため、トルクを制限するとこの加速も制限されます。つまり、モータが最大速度に達するまでに時間がかかります。機械システムの慣性は加速するためにトルクを必要とするため、モータに大きな質量が結合している場合 (フライホイールなど)、時間はさらに長くなります。
機械システムには、静止力である動摩擦と静止摩擦 (スティクション) があります。静止摩擦は動摩擦と同様に機能しますが、システムが移動すると低下します。モータを動かすには、動摩擦や静止摩擦を克服するのに十分なトルクが必要です。これは、設計者がモーターの始動電流を低く設定しすぎることができないことを意味します。電流が制限されすぎると、モータがまったく動き始めないか、目的の速度に達するまでに時間がかかりすぎる可能性があります。
結論
本稿では、MPSのMP6522などのモータ・ドライバで使用可能な電流調整機能を使用して、DCモータの始動時に流れる大電流を調整および制御する方法について説明しました。モータの起動電流を適切に制限する方法を理解することにより、設計者はより小さなモータ・ドライバを使用できるだけでなく、システムの電流供給を最適化することもできます。
_______________________
興味のある内容でしたか? お役に立つ情報をメールでお届けします。今すぐ登録を!
アカウントにログイン
新しいアカウントを作成