CCMとDCMの違い

役立つ情報を毎月お届けします
プライバシーを尊重します
はじめに
フライバックコンバータは、AC/DCおよびDC/DC変換用のスイッチモード電源でよく使用され、特に低電力から中電力範囲 (約2W~100W) でよく使用されます。この電力範囲では、フライバックコンバータは非常に競争力のあるサイズ、コスト、および効率比を提供します。
フライバックコンバータの動作は結合インダクタに基づいています。これは、電力変換を支援するだけでなく、コンバータの入力と出力の間の絶縁も提供します。それ以外は、他のスイッチングコンバータ・トポロジーと同じ基本要素、つまり2つのスイッチ (MOSFETとダイオード) と出力コンデンサがあります。
フライバックコンバータには2つの動作フェーズ、tONとtOFFがあります。これらのフェーズは、MOSFETのスイッチング状態にちなんで名付けられ、制御されます。
tONの間、MOSFETがオンになり、電流が入力から一次インダクタを介して流れ、結合インダクタを線形に充電し、その周囲に磁場を生成します(図1.bを参照) 。二次側では、整流ダイオードが逆バイアスされ、トランスを出力から切断します (図1.aを参照)。
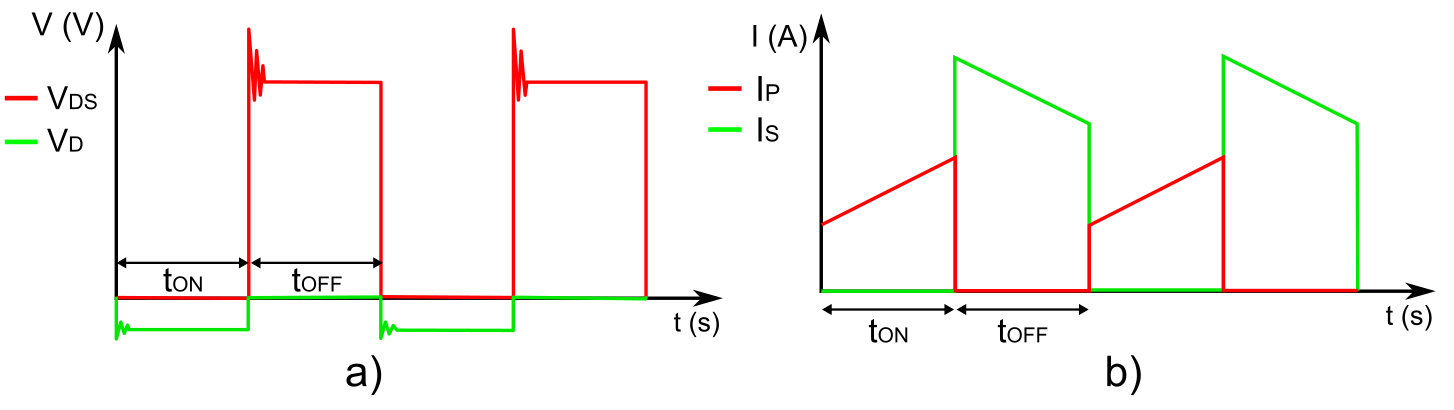
図1: a) MOSFETとダイオードの電圧 b) 一次コイルと二次コイルの電流
出力コンデンサに蓄積された電荷は、負荷で安定した電圧を維持する役割を果たします(図2を参照)。
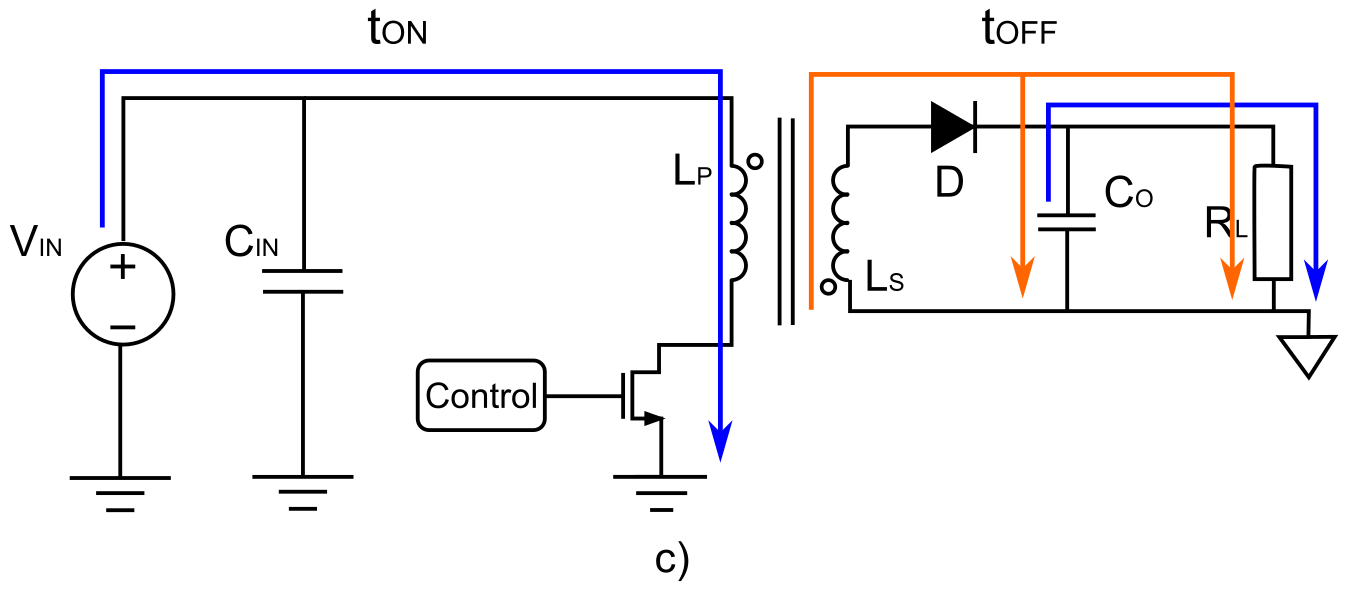
図2: フライバックコンバータの電流図
tOFFの間、MOSFETは開いており、結合インダクタはダイオードを介して減磁し始め、ダイオードは直接分極されます。次に、インダクタからの電流が出力コンデンサを充電し、負荷に電力を供給します。
フライバックコンバータの動作は、各サイクルのインダクタ電流の最小値に応じて2つのモードに分けることができます。インダクタが完全に放電する前にMOSFETがtOFFからtONに切り替わると、インダクタの電流はゼロにはなりません。この動作は、連続導通モード (CCM) と呼ばれます。あるいは、一次インダクタが完全に放電するのに十分な時間tOFFが続く場合、インダクタの電流がゼロになる期間があります。これにより、ダイオードとMOSFETの両方がオフ状態になり、不連続伝導モード (DCM) と呼ばれます。
CCM 対DCM
フライバックコンバータの2つの動作モードは非常に類似しているように見えますが、それぞれに独自の利点と欠点があります。選択した動作モードは、電力変換器の効率、トランス、レギュレーション、EMI、およびコストに大きな影響を与えるため、設計者は設計プロセス中にこれらの利点と欠点を考慮することが非常に重要です。 図3と図4は、CCMとDCMの動作の違いを示しています。
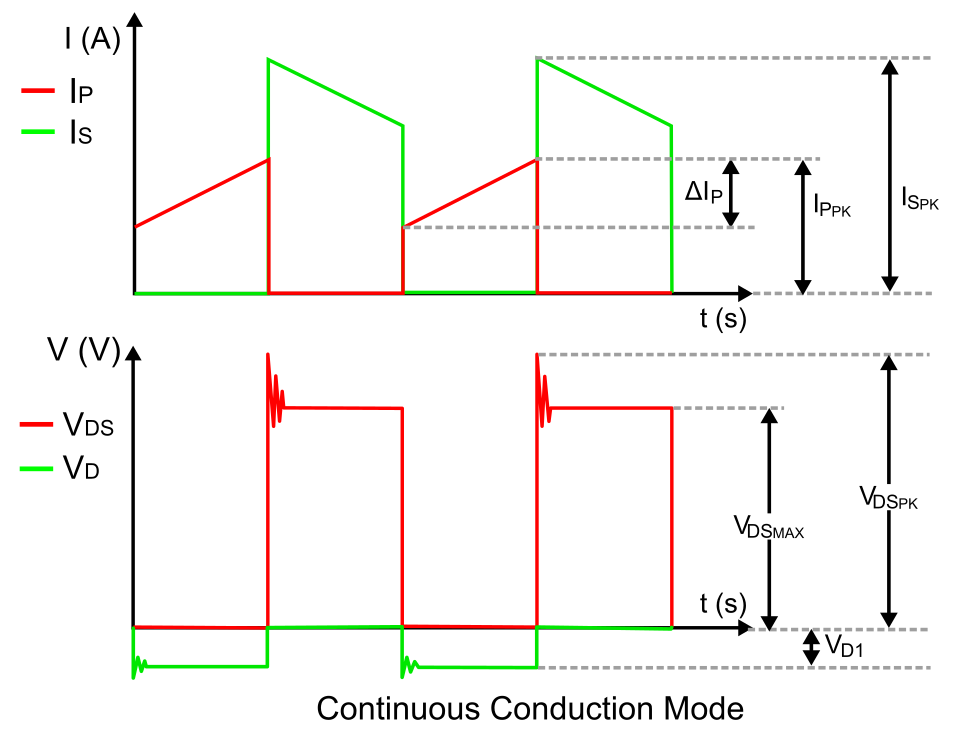
図3: CCMの電流および電圧波形
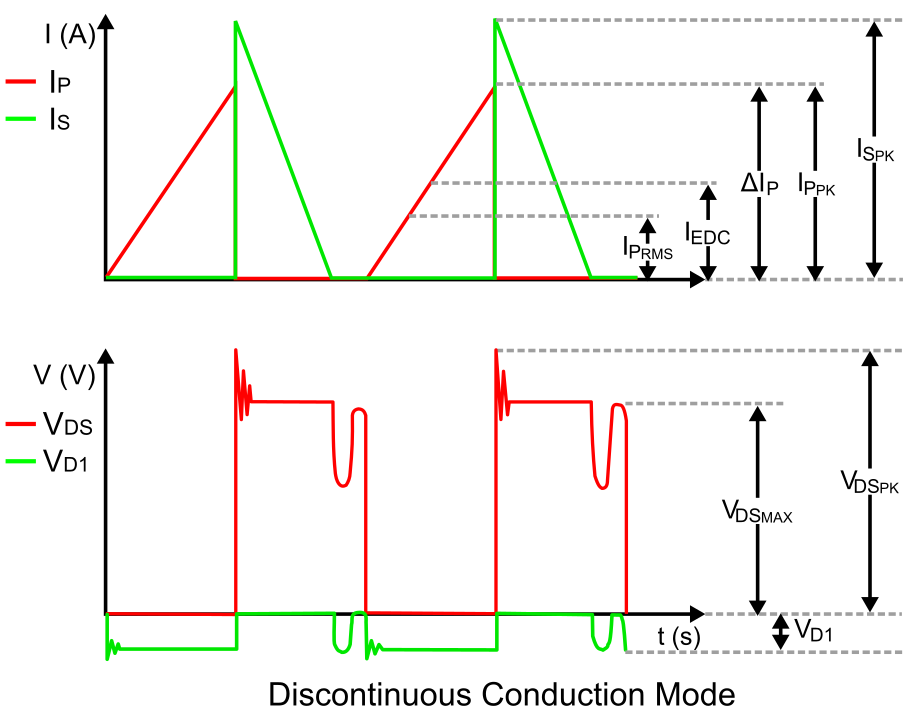
図4: DCMの電流および電圧波形
効率
DCMは、ダイオードの逆回復損失がなく、MOSFETのターンオンがソフトであるため、CCMよりも高い効率を提供します。ただし、デューティサイクルが小さすぎると、一次インダクタを充電する電流が非常に多くなり、コンバータの全体的な効率が低下します。したがって、DCMがこの利点を活用するには、妥当なデューティ サイクルを選択する必要があります。
トランス
トランスのサイズに関して、DCMはより小さなインダクタンスを必要とします。これは、理論的には、より小さなトランスを使用できることを意味します。ただし、一次側および二次側電流のスパイクが増加するため、トランスのワイヤゲージを大きくする必要があります。つまり、どちらの場合も、トランスのサイズはほぼ同じになります。それにもかかわらず、DCMでは実際に小型のトランスを使用できます。これはCCMよりも効率的であるため、DCMのスイッチング周波数を高くすることができ、より小さなトランスの実装が可能になります。
レギュレーション
システムのレギュレーションと安定性に関して、DCMのフライバックはCCMのフライバックよりも補償が容易です。これは、コンバータがCCMで動作するときに、問題のある右側面ゼロ (RHPZ) が現れ、低い周波数で不安定になるためです。DCMはRHPZをより高い周波数にプッシュし、ループを補償しやすくするため、CCMよりも高速な過渡応答を提供します。
さらに、デューティサイクルが0.5を超える場合、CCMフライバックコンバータでサブハーモニック発振が発生する可能性があるため、スロープ補償が必要になります。
EMI
DCMはインダクタを完全に充電および放電するため、一次電流リップルは論理的にCCMよりもはるかに大きくなります。この電流リップルは変動する信号を生成し、一次電流ループ内のさまざまなコンポーネントのアンテナのような動作によって伝搬され、かなりのレベルの電磁干渉 (EMI) を生成します。
一方、DCMフライバックコンバータはゼロ電流スイッチング (ZCS) も実装しています。これにより、整流ダイオードの逆回復が減少するため、エネルギー効率が向上します。このソフトスイッチングは効率に影響し、EMIに強い影響を与えます。これは、エネルギー損失を減らすために使用する必要がある高速回復ダイオードが、二次側で非常に鋭い電圧スパイクを生成するためです。 その結果リンギングを起こし、高周波数差動モードノイズの源となり得ます。これを解決するには、これらのピークを減らし、電磁環境両立性 (EMC) の規格および規制に確実に準拠するために、スナビング機能回路を実装する必要があります。
概要
この記事では、連続伝導モード (CCM) と不連続伝導モード (DCM) の主な違いについて紹介しました。表1に、これらの相違点の概要と、上記以外の相違点の概要を示します。
| 変数 | DCM | CCM |
| より高い | より低い | |
| MOSFET VDS_MAX | 同じ | |
| MOSFET ID_MAX (IP_MAX) | より高い | より低い |
| 整流ダイオード逆電圧ピーク (VD_PK) | 同じ | |
| 整流ダイオード電流ピーク ID1_PK (IS_PK) | より高い | より低い |
| RMS電流とリップル | より高い | より低い |
| トランスサイズ | 小さい | 大きい |
| EMI | 高い、より大きなコンデンサとフィルタが必要 | より小さく、より小さなコンデンサとフィルタ |
| 相互調整 | より高い変動 | より低い変動 |
| 過渡応答 | より速い | より遅い |
| 安定性 |
|
|
表1: DCM vs. CCM
MPSは、両方の動作モードで動作できる多種多様なフライバックコンバータを提供し、またフライバックコンバータ設計の背後にある理論を理解し、設計と部品の選択プロセスをスピードアップし、回路での予期しない動作を回避するのに役立つリファレンスデザイン、ツール、ウェビナー、およびその他の寄稿文を提供しています。詳細については、フライバック・ソリューションとフライバック設計ツールをご覧ください。
_______________________
興味のある内容でしたか? お役に立つ情報をメールでお届けします。今すぐ登録を!
アカウントにログイン
新しいアカウントを作成