分数調波振動の認識と排除

役立つ情報を毎月お届けします
プライバシーを尊重します
はじめに
DC/DCの不安定性は、不適切な補償パラメータや不十分なレイアウトなど、さまざまな要因が原因で発生します。本稿では、電流モードスイッチングレギュレータのインダクタ電流が連続し、デューティサイクルが50%を超える場合に発生する可能性のある不安定性の一種である分数調波振動について説明します。このような発振により、不安定な電源になります。
分数調波振動について学ぶために、ピーク電流制御を備えた降圧回路と、これらの発振が時間と周波数に基づいてどのように変化するかを考えてみましょう。
時間に関連した分数調波振動
図1は、エラー信号 (VC) をインダクタ電流信 (IL) と比較するピーク電流制御を備えた降圧回路を示します。VCは、出力電圧 (VOUT) から基準電圧 (VREF) を引いたものです。これにより、上下にあるMOSFETを駆動するための制御信号が生成されます。
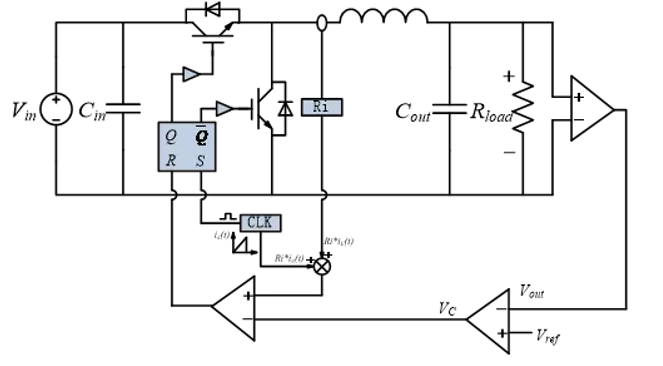
図1 : VCとILの比較
図2は、VCとILが交差する場所を示します。青の線は安定条件下でのIL信号とスイッチング波形 (SW) を示し、ピンクの線は外乱後のIL信号とSW波形を示しています。∆I0および∆tONは、SWによってエラー値として定義されます。図2は、デューティ比が30%の場合、外乱が徐々に減少し、システムが安定する傾向があることを示しています。
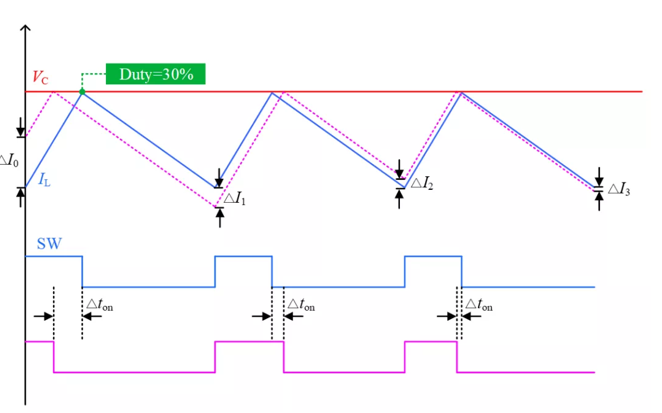
図2 : デューティサイクル=30%で比較的安定したIL
図3は、デューティ比が70%に増加すると、外乱が徐々に増加し、システムが不安定になることを示しています。
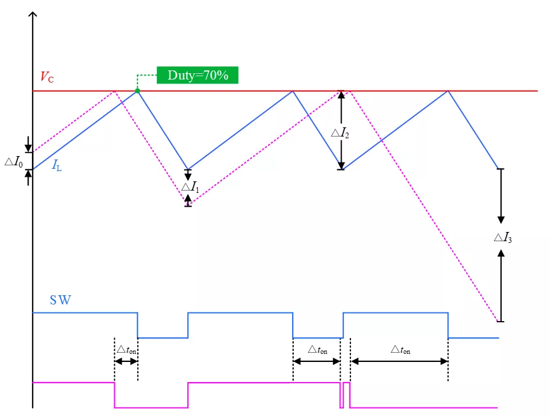
図3 : デューティサイクル=70%で不安定なIL
図2と図3から、50%のデューティ比を外乱の収束と発散の境界点として推測できます。
境界点は公式で導き出すこともできます。図4にインダクタ電流の外乱波形を示します。変数で、Dはデューティサイクル、m1およびm2はインダクタ電流の立ち上がりと立ち下がりの傾き、ic1とic2はインダクタ電流がVCに到達したときの値を表す場所と定義されています。ピンクの点線の∆iL(0)および∆iLT(s) は、それぞれインダクタ電流の開始値と終了値を表します。青い実線のiL(0)とiLT(s)は、それぞれ外乱の開始値と終了値を表します。
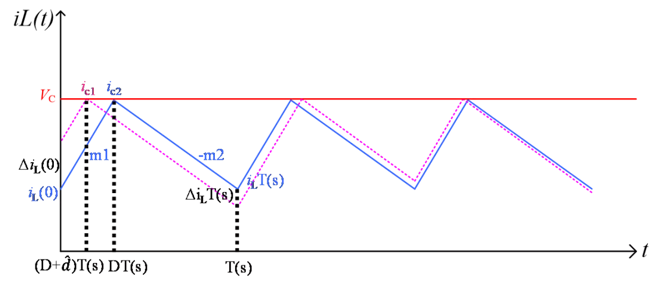
図4 : インダクタ電流の外乱波形
これらの定義された変数を使用して、ΔiLTは、式 (1) を使用して計算できます。

たとえば、n番目のサイクルでDが半分未満 (デューティサイクルが50%未満であることを意味する) の場合、ΔiLTは徐々にゼロに収束します。逆に、デューティサイクルが50%を超える場合、∆iLTは発散します。値は正または負であり、nに関連して、変化率がスイッチング周波数のちょうど半分であるため、外乱は分数調波振動であると判断されます。
周波数に関連する分数調波振動
また、周波数領域を使用して次の分数調波振動を取得できます。図1のピーク電流制御による降圧回路図に基づき、システムによって出力に制御される開ループ伝達関数を導き出せるシステム構造図を図5に示します。
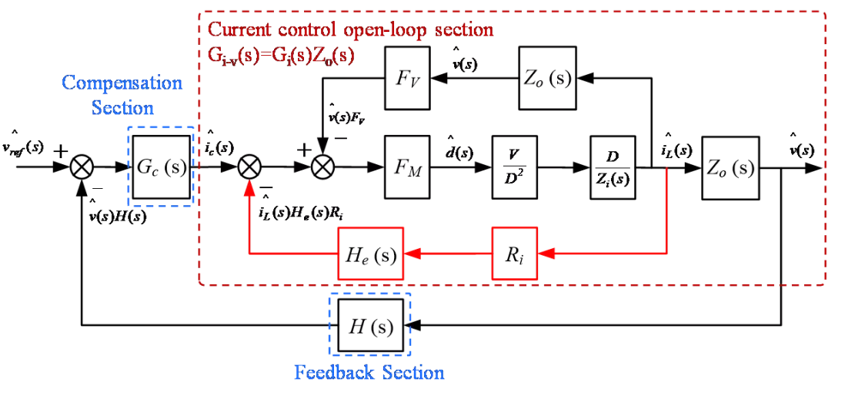
図5 : ピーク電流制御を備えた降圧回路システムの開ループ伝達
開ループ伝達関数を出力で制御して、入力電圧 (VIN) を12Vに設定し、スイッチング周波数 (fSW) が400kHzの場合、ボード線図に従ってデューティサイクルが変化します。図6は、デューティが50%と67%の場合、ゲイン曲線はスイッチング周波数の半分に共振ピークをもつことを示しています。位相曲線がすばやく反転し、分数調波振動が発生したことを示します。これは、システムの安定性に大きく影響します。ただし、デューティサイクルが28%の場合には、ゲイン曲線も位相曲線も異常ではありません。
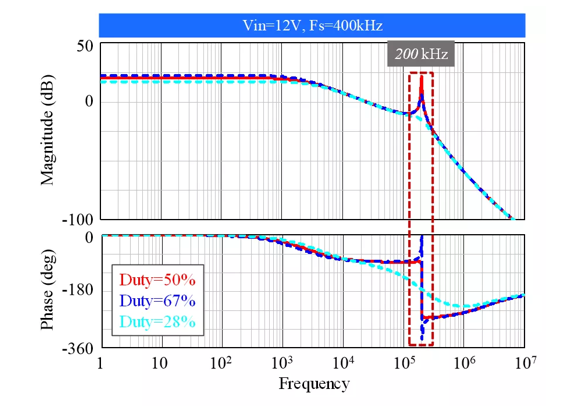
図6 : Gi-v(s) 関数ボード線図
分数調波振動の排除
分数調波振動を低減する方法はいくつかあります。図7に、のこぎり波電流補償を使用したピーク電流制御のブロック図を示します。この方法では、のこぎり波補償信号がインダクタ電流信号に重なり合います。その結果、VC信号が一定の値から脈動するスロープ信号に変化します。通常、このプロセスはスロープ補償技術と呼ばれます。
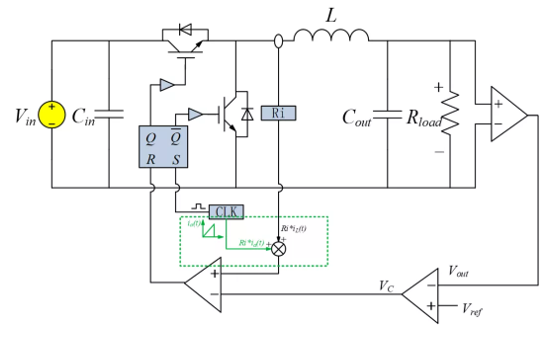
図7 : のこぎり波電流補償の組み込み
図8は、スロープ補償がある場合とない場合で何が起こるかを比較することにより、スロープ保証技術の抑制効果を示しています。
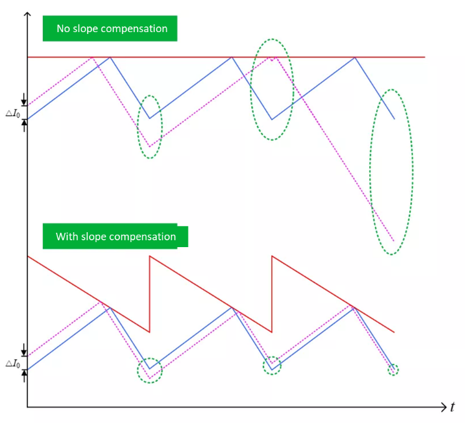
図8 : のこぎり波電流補償による抑制効果
スロープ補償技術は、数学的な導出および異なる周波数を使用して分析できます。
スロープ補償技術の欠点
スロープ補償は分数調波振動を抑制することができますが、電源設計プロセスでスロープ補償を使用する場合には、以下のような欠点を考慮します。
- スロープ補償の追加により、チップの電流制限はデューティサイクルの増加とともに徐々に減少します。
- 過度のスロープ補償は、システムの動的パフォーマンスに影響を与えます。
パワーMOSFETを内蔵した高効率の同期整流ステップダウンコンバータ、MPQ4420Aを考えてみましょう。図9は、デューティサイクルが大きいほど、電流制限ポイントがより小さくなることを示しています。
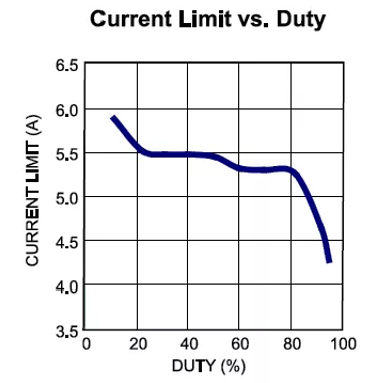
図9 : MPQ4420Aの電流制限とデューティサイクル
図10は、スロープ補償を使用したGi-v(s)関数を示します。ここで、Mcはスロープ補償係数です。補償係数が大きいほど、システムの帯域幅が小さくなり、システムの動的応答が遅くなります。
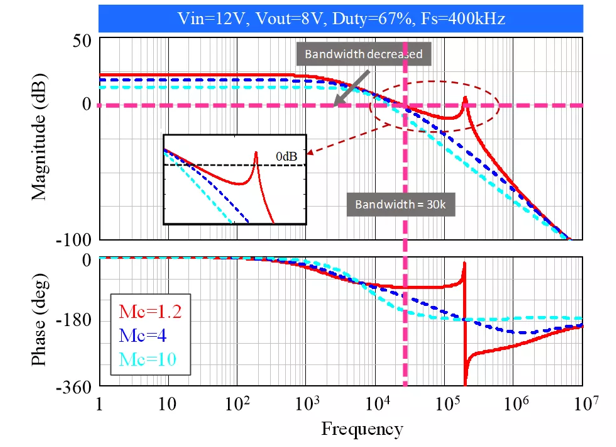
図10 : スロープ補償を使用したGi-v(s)ボード線図
結論
結論として、スイッチング電源の安定性を維持するには、分数調波振動を制御することが重要です。本稿では、時間領域と周波数領域を使用して分数調波振動を認識する方法について説明しました。また、スロープ補償が、その悪影響があっても、分数調波振動をどのように低減できるかについても説明しました。
MPSは、絶縁型DC/DCコンバータおよびモジュールなど、DC/DCの安定性を実現する最先端の電源ソリューションを提供します。
_______________________
興味のある内容でしたか?お役に立つ情報をメールでお届けします。今すぐ登録を!
アカウントにログイン
新しいアカウントを作成