力率改善 (PFC)

役立つ情報を毎月お届けします
プライバシーを尊重します
力率は、入力電源から取り出すエネルギーの総量に対する機器が出力に伝送できるエネルギーの比として定義されます。これは、特にEUなどの国や国際機関によって定められている規制により、電気機器の設計における重要な性能指数です。これは、欧州市場での販売のために機器が持つ必要のある最小力率または最大レベルの高調波を定義しています。
組織が力率の改善に投資している理由は、低品質の電力が電力網にとって本当の脅威であり、熱損失を増加させ、潜在的に停電を引き起こすためです。
力率の低下には、主に2つの原因があります。
- 変位 : これは、通常、インダクタやコンデンサなどの受動素子の存在により、回路の電圧と電流波の位相がずれている場合に発生します。
- 歪み : 波の元の形状の変化として定義され、これは通常、整流器などの非線形回路によって引き起こされます。これらの非線形波は、高調波成分が多く、グリッド内の電圧を歪ませます。
力率改善 (PFC) は、機器の力率を向上させるために使用する一連の方法です。
変位の問題を解決するために、回路の総無効電力を補償するために外付けの無効成分が一般的に使用されます。
歪みの問題を解決するには、次の2つのオプションがあります。
- 受動力率改善 (PFC) : パッシブフィルタを使用して高調波をフィルタリングすることでPFを改善します。これは通常、低電力アプリケーションで使用されますが、高電力では十分ではありません。
- アクティブ力率改善 (PFC) : スイッチングコンバータを使用して、歪んだ波を正弦波に成形するために変調します。新しい信号に存在する高調波はスイッチング周波数にあるだけなので、簡単にフィルタリングできます。これは最適なPFC方式と考えられますが、設計に複雑さが増します。
優れた力率改善回路は、力率の悪い機器が非効率になり、グリッドに不必要な負荷がかかり、接続された残りの機器に問題を引き起こす可能性があるため、最新の設計にとって重要な要素です。
AC/DC電源における力率改善 (PFC) の必要性
以前の寄稿文で説明したように、AC/DC電源は、入力AC電圧を出力で安定したDC電圧に変換するいくつかの回路で構成されています。これらの回路の中で最も重要なのは、AC電圧をDC電圧に変換する役割を果たす整流器です。ただし、この回路だけでは適切な動作を保証するには十分ではありません。
AC/DC電源を効率的かつ安全にするためには、絶縁、力率改善 (PFC)、および電圧低減を組み込む必要があります。これらの要素は、ユーザー、グリッド、および接続された機器を保護し、すべてのスイッチング電源にそれぞれある程度集積されています。
スイッチング電源の最初のステップは、入力電圧の整流です。整流は、信号をACからDCに変換する処理であり、整流器を使用して行われます。AC波の負電圧は、半波整流器を使用して遮断するか、全波整流器を使用して反転させることができます。
全波整流器は、グラーツブリッジと呼ばれる配置で接続された4つのダイオードで構成されます。これらのダイオードは、電源からの電圧が負から正になるにつれてオンとオフを切り替え、負の半波の極性を反転し、AC正弦波をDC波に変えます (図1を参照)。

図1 : フルブリッジ整流器の回路図
この波はリップル電圧と呼ばれる大きな電圧変動があるため、リザーバコンデンサがダイオードブリッジに並列に接続され、出力電圧リップルを滑らかにします。
しかし、整流器のリザーバコンデンサの波形を観察すると、コンデンサの入力電圧がコンデンサの電荷よりも大きい点から整流信号のピークまで、非常に短い時間の間にコンデンサに充電されていることがわかります。これにより、コンデンサに一連の短電流スパイクが発生し、正弦波のように見えません (図2を参照)。

図2 : 整流器出力の電圧および電流波形
これは、電源だけでなく、電力網全体にとって非常に大きな問題です。この問題の大きさを理解するには、まず高調波の概念に関する理解が必要です。
高調波とフーリエ変換
今まで見てきた電気波形のほとんどは正弦波です。しかしながら、特に反応性部品 (コンデンサ、インダクタ) または非線形成分 (トランジスタ、ダイオード) が存在する場合、波は純粋に正弦波であることができません。これらの波は、さまざまな、しばしば複雑な数学的関数によって定義されます。これにより、解析の背後にある計算がかなり困難になるため、この波の解析がはるかに困難になる可能性があります (図3参照)。

図3 : 歪んだ波 - 波形と波動関数
幸いなことに、19世紀にフランスの数学者ジャン=バティスト・ジョゼフ・フーリエは、任意の周期波形を異なる周波数の一連の正弦波と余弦波に分解する手法を思いつきました (図4を参照)。基本波と呼ばれるこれらの最初のものは、周波数が最も低い波です。次に、いくつかの特定の振幅と周波数を持つ、他の波が基本波と組み合わされます。経験則として、波形の形状が純粋な正弦波から逸脱するほど、高調波が多くなります。
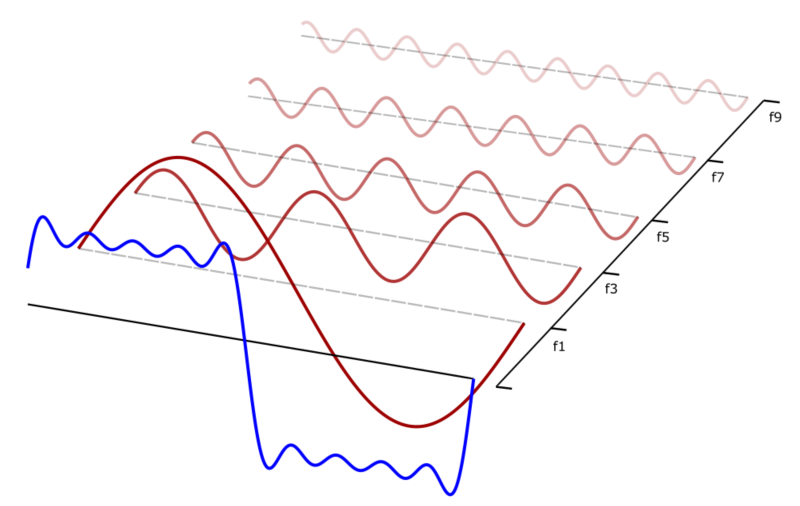
図4 : 任意波形のフーリエ級数への分解
高調波周波数は基本周波数の整数倍でなければなりません。たとえば、波の基本周波数が50Hzの場合、2番目の高調波周波数は100Hz、3番目の高調波周波数は150Hzになります。
高調波の最も重要なパラメータの1つは、基本周波数への影響の尺度である振幅です。通常、基本周波数は最大の振幅を持ち、高調波の振幅はその次数に比例して減少するため、第9高調波または第20高調波は事実上存在しません。これらの高調波の振幅をグラフ化して、任意の波形の作成において各高調波が果たす役割を示します。
コンデンサの電流の問題は、デルタ関数と非常によく似ていることです。このタイプの波は、理想的には、無限に短く、無限に強力なパルスです。この形状の波は、正弦波に分解するために当然複雑になり、実質的にすべての周波数にわたって多数の強力な高調波が生じます (図5を参照)。

図5 : デルタ関数と方形波の高調波分布
これは必ずしも問題ではありません。機器は依然として負荷に電力を供給するため、多くの低電力AC/DC電源メーカーは、電源の力率にのみ影響するそれについて何もしないからです。しかし、グリッドに接続された低力率の高出力デバイスが多すぎると、問題があり、停電の原因となることさえあります。
力率
交流電力には3種類あります。第1はアクティブパワーと呼ばれ、通常は実電力、またはPと呼ばれます。これは負荷に伝達される正味エネルギーを表します。負荷が純粋に抵抗性である場合、ライン内のすべての電力は有効電力であり、電圧と電流は互いに同じ位相で振動します。第二に、インダクタやコンデンサのように負荷が純粋に反応性である場合、電力は純粋に反応性であり、しばしばQで表されます。この電力は、反応性成分の磁界および電界を生成および維持するために使用されます。これらのフィールドにより、電流は電圧に対して位相がずれ、容量性負荷の場合は90°進み、誘導負荷の場合は90°遅れます (図6を参照)。これは、正の無効電力が負の無効電力によってキャンセルされるため、これらの純粋に無効負荷によって生成される全電力はゼロであることを意味します。
. V-I Waveforms and Associated Power for a 90° Phase Difference (Right)")
図6 : 同相V-I 波と関連する電力 (左) 90°位相差のためのV-I 波形と関連電力 (右)
実用的なアプリケーションでは、負荷は純粋に抵抗性または反応性ではなく、両方の組み合わせです。第3の交流電力型は、有効電力と無効電力の両方を付加したもので、皮相電力、またはSと呼ばれます。この加算は二次であり、有効電力、無効電力、皮相電力の関係はよく三角形で表現されます。
力率は、有効電力と皮相電力の関係であり、回路内の送電効率の測定に役立ちます (図7を参照)。

図7 : パワートライアングル
低力率は、変位と歪みの2つの因子を組み合わせたものです。第1のものは、線形負荷において、電流および電圧波を位相外にする反応性部品の存在に起因します。電圧と電流の位相差が総力率に与える影響は、次式 (1) を使用して波間の角度の余弦として計算される変位係数によって定義されます。
$$PF_{DISPLACEMENT}= COS (\theta_{V}-\theta_{I})$$しかし、手元の問題に戻ると、電源設計者が直面する問題は、電流と電圧波が位相がずれているだけでなく、電流波形が非線形関数であるパルス列になるという事実です。これは、電力とも呼ばれる電圧と電流の乗算も非線形であり、非常に非効率であることを意味します。回路に蛍光灯、電子デバイス、フルブリッジ整流器などの非線形負荷がある場合に発生します。これらの負荷は、非常に短く、急激なバーストで電流を吸い込み、非常に大量の高調波を生成し、信号に歪みを追加します。高調波の存在による信号に存在する歪みの量を記述するのによくある方法は、基本電流に対する高調波電流の割合を表す全高調波歪み (THD) の大きさによるものです。THD は次の式 (2) を使用して計算できます。
$$THD = \frac {\sqrt {\sum n ≠1 \space I_{n}^2 \space RMS}}{ {I_{fund. \space RMS}}} = \frac {RMS \space harmonic \space current}{RMS \space fundamental \space current}$$ただし、歪みが全力率に与える影響には、次式 (3) による全高調波歪みに関連する歪み係数を使用します。
$$PF_{DISTORTION}= \sqrt \frac {1}{1+THD^2}$$変位係数と歪み係数の積が力率を構成し、式 (4) で計算されます。
$$PF = PF_{DISPLACEMENT}\space x \space PF_{DISTORTION}= COS(\theta_{V}-\theta_{I}) \space x \space \sqrt \frac {1}{1+THD^2} $$力率はデバイスの動作に大きな影響を与えることはありませんが、電流がグリッドにポンプで戻されると、電力率の低下がもたらされます。例えば、ブレンダー内のDCエンジンなど、非常に低い力率の誘導負荷がグリッドに接続されている場合、エンジンが注入する高調波のために、近隣住宅のテレビ画面がちらつき始める可能性があります。大規模では、これはグリッドに大きな加熱損失を引き起こし、停電の原因となることさえあります。
当然のことながら、電源供給業者は、機器がグリッドに与え得る電力干渉の電力量に制限を設けています。これを行う最初の試みは、電気照明の開始とともに、他のデバイスからの干渉が白熱灯をちらつかせていることを認識した1899年でした。その後、1978年に国際電気技術委員会 (IEC) の規制が提唱され、消費者製品への力率改善の導入が強制されました。
それ以来、国によって力率制限に関する独自のガイドラインと規制が作成されています。米国では、任意のEnergy Starガイドラインに、すべてのコンピューティング機器が最高定格出力で動作する場合、PFが少なくとも0.9でなければならないと規定されています。EUでは、法律 (IEC31000-3-2) はより厳格であり、電気機器を電化製品 (A)、電動工具 (B)、照明 (C)、電子機器 (D) の4つのカテゴリーに分けています。各カテゴリには、各高調波 (39番目まで) が基本周波数に対する相対荷重に関する特定の制限があります。中国GB/T 14549-93または国際IEEE 519-1992などの国には、この法律の独自バージョンがあります。
図8に、周波数領域と時間領域の両方で、Class-Cデバイスに対して IEC61000-3-2 によって確立された波形制限を示します。ご覧のとおり、周波数領域の最大高調波振幅の値は矩形波の形状に従います。これは、時間領域内の結果の波を観察することによって確認されます。
 and Time (Right) Domains")
図8 : 周波数 (左) および時間 (右) 領域におけるClass-Cデバイスの最大高調波値
IEC61000-3-2で定義される波形は理想的な正弦波とは大きく異なるように見えますが、高調波と力率の安定化限界を超えるPFCのないデバイスを見つけることはそれほど難しくはありません。そのため、動作効率を高め、コンシューマ製品として販売できるようにするためには、あらゆる製品化された機器において、良好な力率改善回路が必要です。
力率改善 (PFC) とは?
力率改善 (PFC) は、電子機器のメーカーが力率を改善するために使用する一連の方法です。
前述のように、低力率は、信号内の変位または歪みの存在によって引き起こされます。コンデンサが位相を前方に引きずるのに対し、インダクタはそれを駆動し直すため、力率に対する変位の負の影響は比較的簡単に解決できます。システムの電流波が電圧より遅れている場合は、回路に適切なインピーダンスのコンデンサを追加するだけで、電流波の位相が電圧と同相になるまで前方に引き出されます (図9を参照)。
 and Power Transmission with Corrected Power Factor and PFC (Right)")
図9:PFCなしの低PF送電 (左) と修正された力率とPFCによる送電 (右)
一方、非線形回路に通常存在するシステムの歪み係数を改善することは、線形回路で見られる変位係数を補正するよりもやや複雑です。そのためには、次の2つのオプションがあります。
- 高調波をフィルタアウトする : 効率の損失を受け入れますが、入力にフィルタを追加することで、グリッドに注入される高調波の数を減らします。これはパッシブPFCと呼ばれ、高次高調波を除去することを目的としたローパスフィルタを使用し、理想的には50Hzの基本周波数のみを残します (図10を参照)。実用的なアプリケーションでは、機器のPFの改善にはあまり効果的ではなく、必要なコンデンサとインダクタの効率、サイズ、重量が低下するため、高電力ソリューションでは実用的ではありません。これは通常、数百ワットを超える電力を持つアプリケーションでは使用されません。
 and Passive PFC Filter Frequency Response (Right)")
図10 : DCMモードのアクティブPFC、出力電流波形 (左)、パッシブPFCフィルタの周波数応答 (右)
- アクティブ力率改善 : この方法では、電流波形の形状が変化し、電圧に従うようになります。このようにして、高調波ははるかに高い周波数に移動され、フィルタアウトがはるかに容易になります。これらのケースで最も広く使用されている回路は、昇圧コンバータです (図11を参照)。この回路は、変圧器と同様に、電流を低下させながら、DC電圧を上昇させます。最も単純な昇圧コンバータは、インダクタ、トランジスタ、およびダイオードで構成されています。

図11 : アクティブPFCを備えたスイッチモード AC/DC電源
昇圧コンバータには2段階の動作があります。第1段階では、スイッチが閉じられると、インダクタは電圧源 (この場合、整流器から出てくる電圧) によって充電されます。スイッチが開くと、インダクタは前の段で蓄えた電流を回路に注入し、出力の電圧を増加させます。この電流はまた、コンデンサを充電します。コンデンサは、インダクタの再充電中に出力の電圧レベルを維持する役割を担います。
スイッチング周波数が十分に高い場合、インダクタもコンデンサも完全に放電せず、出力の負荷は常に入力電圧源よりも大きな電圧を持ちます。これは連続導通モード (CCM) と呼ばれます。スイッチが閉じられる時間が長くなればなるほど (トランジスタのオンが長いほど)、出力の電圧が大きくなります。デューティサイクル (スイッチが全体のスイッチングサイクルに対してオンになっている時間) が適切に制御されていれば、入力電流波を正弦波に成形することができます。
ただし、すべてのPFCコンバータがCCMを使用するわけではありません。最終的なPF品質を犠牲にしますが、スイッチング損失を減らし、回路を安価にする別の方法もあります。この方法は、境界伝導モード (BCM) または臨界伝導モードと呼ばれ、インダクタが完全に放電されるのと同時にトランジスタを切り替えます (図12を参照)。これは、ゼロ電流スイッチング (ZCS) と呼ばれ、昇圧コンバータのダイオードをより迅速かつ容易に極性を変化させることができ、高品質で高価な部品の必要性を低減します。
 and Boundary Conduction Mode (Right)")
図12 : 連続導通モード (左) および境界伝導モード (右) のPFCインダクタ、トランジスタ、ダイオード電流
コンバータは入力電圧を追跡するため、出力電流は周波数50Hzの正弦波のように見えます。しかし、この電流波形はまだ純粋な正弦波とは大きく異なっているので、論理的に多数の高調波成分があります。これらの高調波成分はスイッチング周波数の倍数であり、50Hzの基本成分よりもはるかに高い (50kHz~100kHz) であるため、非常に効果的にフィルタアウトされます。これにより、力率が大幅に増加します。そのため、一部のスイッチング電源は最大 0.99のPF値に達します。
BCM力率補正を実装した製品の1つはMP44010コントローラです。昇圧コンバータに接続すると、ZCSピンはインダクタがいつ放電されるかを検出し、MOSFET (図13のQ1) を起動します。このICは電流と電圧を比較し、入力電圧の形状に従って電流ピークを形成します。

図13 : MP44410の代表的なアプリケーション回路
まとめ
力率は、電子機器の設計において考慮すべき重要な要素で、特にAC/DC電源の場合にそうです。ただし、適切なPFC回路を選択することは、利用可能なさまざまなトレードオフを分析することを意味します。
まず、低力率の原点が変位または歪みによるものかどうかを検出します。次に、回路の電力量に応じて、アクティブまたはパッシブPFCを選択します。アクティブPFCの場合、設計者は、効率と力率品質のトレードオフである連続導通モードと境界伝導モードのいずれかでコンバータを実装する必要があります。
実装するソリューションが何であれ、MPSには幅広いPFCコントローラが用意されており、ご質問があればMPSのエンジニアがお手伝いします。
興味のある内容でしたか? お役に立つ情報をメールでお届けします。今すぐ登録を!
アカウントにログイン
新しいアカウントを作成