MPS オープンソース人工呼吸器
自動バッグバルブマスク (BVM) 蘇生器
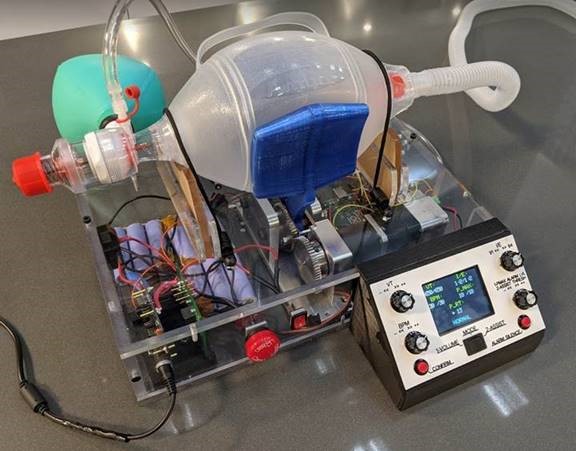
MPSエンジニアリングチームは、オープンソースの機械式バッグバルブマスク (BVM) ブリッジ人工呼吸器に取り組んでいます。モータ制御と電源に関する専門知識をソリューションに適用して、通常は手動プロセスであるものを迅速に自動化するのに役立てています。私たちは、COVID-19のパンデミックと戦うために取り組んでいる他の多くのオープンソースプロジェクトに触発され、アプローチするにあたって主にMIT E-Ventプロジェクトを参照して、実用的なソリューションを考え出しました。MPSは、オープンソースの設計アプローチを活用して、私達のスキルと専門知識を提供し、世にプラスになる影響を与える役割を分担する可能性を広げたいと考えています。
デバイスの機能
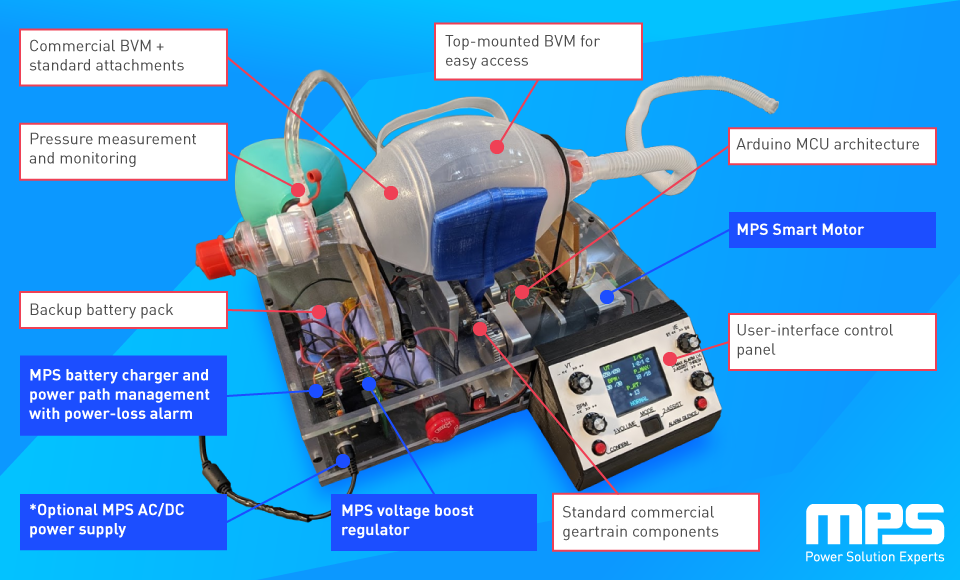
- 標準のバッグバルブマスク蘇生器の圧搾を自動化:
- 病院、救急車などで利用できる標準のBVMおよびBVMアクセサリと互換性があります
- 手動による介入が必要な場合、BVMは簡単に取付けそして取り外すことができます
- 以下の運用制御が可能:
- 一回の呼吸量 (VT) 、目標範囲 約200mLから約800mL
- 1分あたりの呼吸数 (BPM) 、8bpmから40bpm
- 吸気 / 呼気 (I / E) 時間比、1:1~1:4
- 圧力の測定と監視:
- 最大吸気 (PIP) 、プラトー、そしてPEEP時の圧力
- 安全機能:
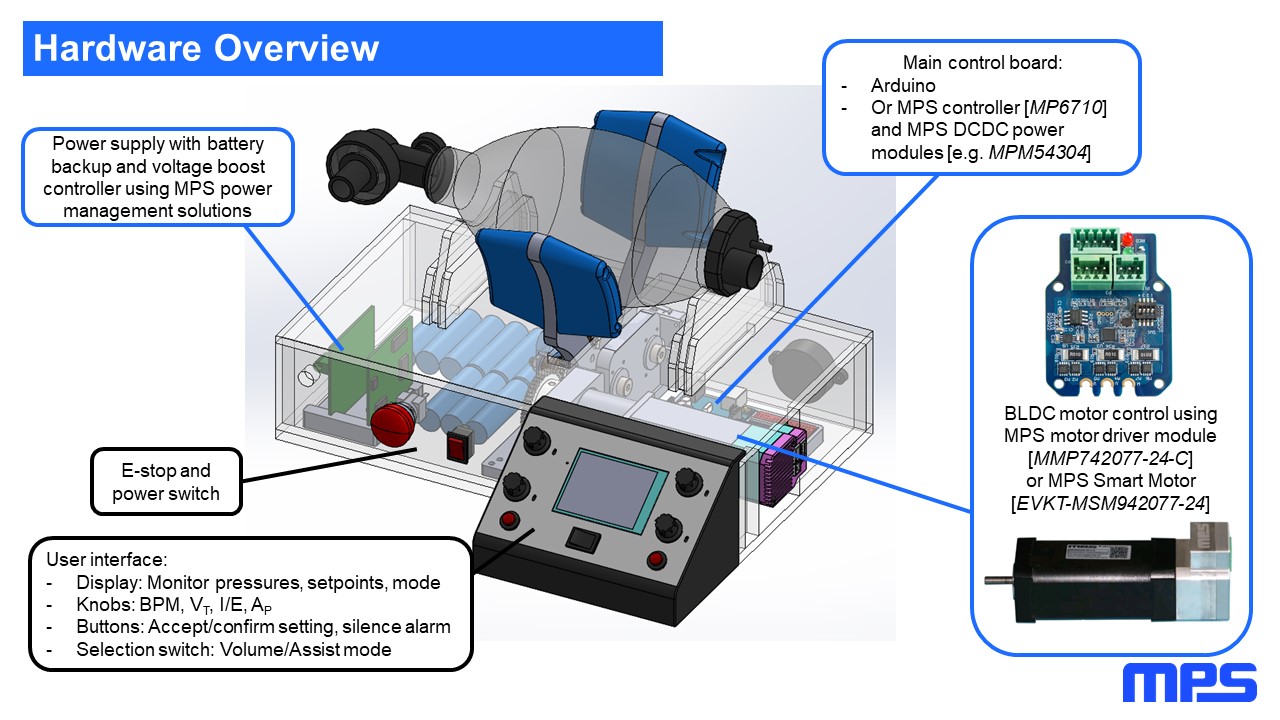
- システム障害が発生した場合にBVMを手動で使用できるようにするフェイルセーフ (E-stop電源切断および予備ドライブ可能なメカニズム)
- 主電源喪失および圧力イベント (圧力喪失、ピーク圧力の超過など) の可聴アラーム
- バッテリバックアップ
- セットポイントの変更を実装するための確認ボタン
概要ビデオ
ビデオアップデート 2020年4月17日
ビデオケーススタディ
設計上の利点
- 電源パス付きの専用充電器ICがバッテリパックを管理し、次の利点を提供
- AC電源なしで約60分作動
- AC電源が供給されているときにバッテリパックを完全に充電しておきます
- ACからバッテリへのシームレスな移行を提供し、停電時にも継続的な運用を可能にします
- 充電諸特性がバッテリパックの安全な動作領域に準拠していることを確認します
- すべてのスイッチングFETを統合することにより、コンポーネント数の削減と効率の向上を可能にします
- モータシステム
- オールインワンに統合された位置センサ、ドライバーパワーステージおよびFOC制御エンジン
- GUI で簡素化されたモータ制御プログラミング
- 他より30%小型
- 非常に効率的で、バッテリでもでも60分のランタイムが可能
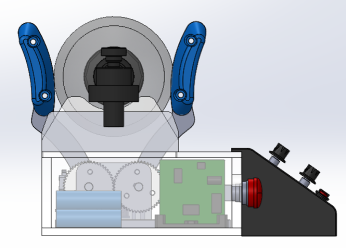
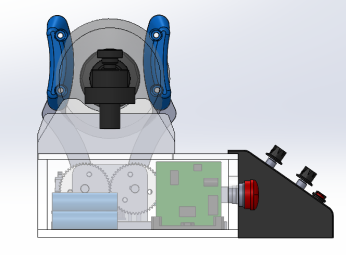
- 機械加工、3Dプリント、2Dカット、および市販の駆動系部品の組み合わせでシンプルな機械設計
- 標準MPS製品:
- 電源詳細
- バッテリバックアップ、BMS
- 内部電源システム
- モータとモータコントローラシステムの詳細
- 医療専門家からのデバイスの認定と使用に関する推奨事項
- 電子機器受託製造サービス (EMS) または受託製造 (CM) は、医療規制および製造の専門知識に基づいて行っています。
- 部品供給元
|
|
 |
|
状況アップデート 2020年6月15日
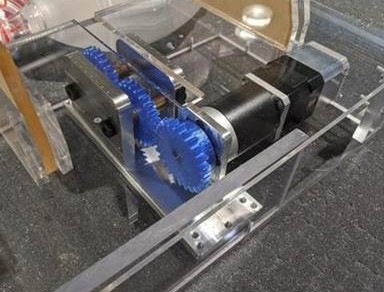
- 制御コードファイルを、設計ドキュメントページの更新されたファイルセットと共に、ダウンロードできるようにしました。この新しいファイルセットには、私たちが行ったギアの変更に追随するために更新されたCADモデルとパーツリストも含まれています。最新のテストから、BVMを圧迫し、モータを最適な出力範囲に配置するための追加のトルク機能を得るには、より深いギア減速を追加することが適切であることが分かりました (1:1平歯車から2:1に変更し、ギアボックスを含む総削減比は200:1となりました) 。更新されたすべてのファイルには、それらを強調するために「200615」という接尾辞が付けられています。
状況アップデート 2020年5月4日
- 設計のサポートドキュメントを用意し、ダウンロードできるようにしました。それに含まれているのは、操作および組立ノート、高レベルの回路図、市販および製造部品のBOM、および3DCADファイルです。いくつかのバグに取り組んでおり、またコードをクリーンアップしているため、リリースに適した状態になるまで制御コードはアップロードしていません。
状況アップデート 2020年4月17日
- 可聴アラームが電力喪失に備えて組み込まれました。他のアラーム機能のプログラミングが進行中です。
- 絞り出しアームの待機ルーチンが実装されました。個別のリミットスイッチの代わりに、スマートモータの電流検出機能を使用してこれを行います。プログラムが起動すると、アームがエンクロージャの端に当たるまでゆっくりと開き、エンクロージャの端がホーム基準位置として記録されます。
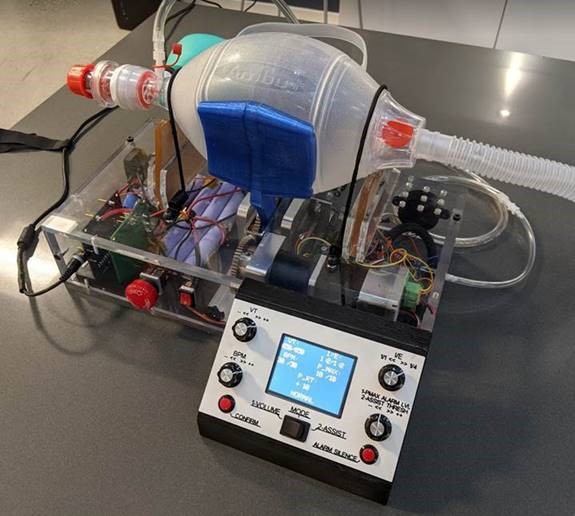
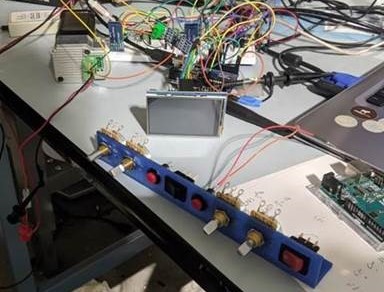
- 配線と周辺機器は、エンクロージャ内に完全に収まるより緊密なパッケージに統合され、制御入力は制御ボックスに取り付けられています。
- 圧力センサをBVMに接続しました。ディスプレイには今のところリアルタイムの圧力値が表示されます。各サイクル (ピーク、プラトー、およびPEEP) で必要な特定の圧力値を検出して表示できるようにするために、ある種のアルゴリズムに取り組む予定です。
- BVMを一定の位置に保つのに役立つシンプルな弾性保持ストラップを追加しました
 |
 |
今後のステップ
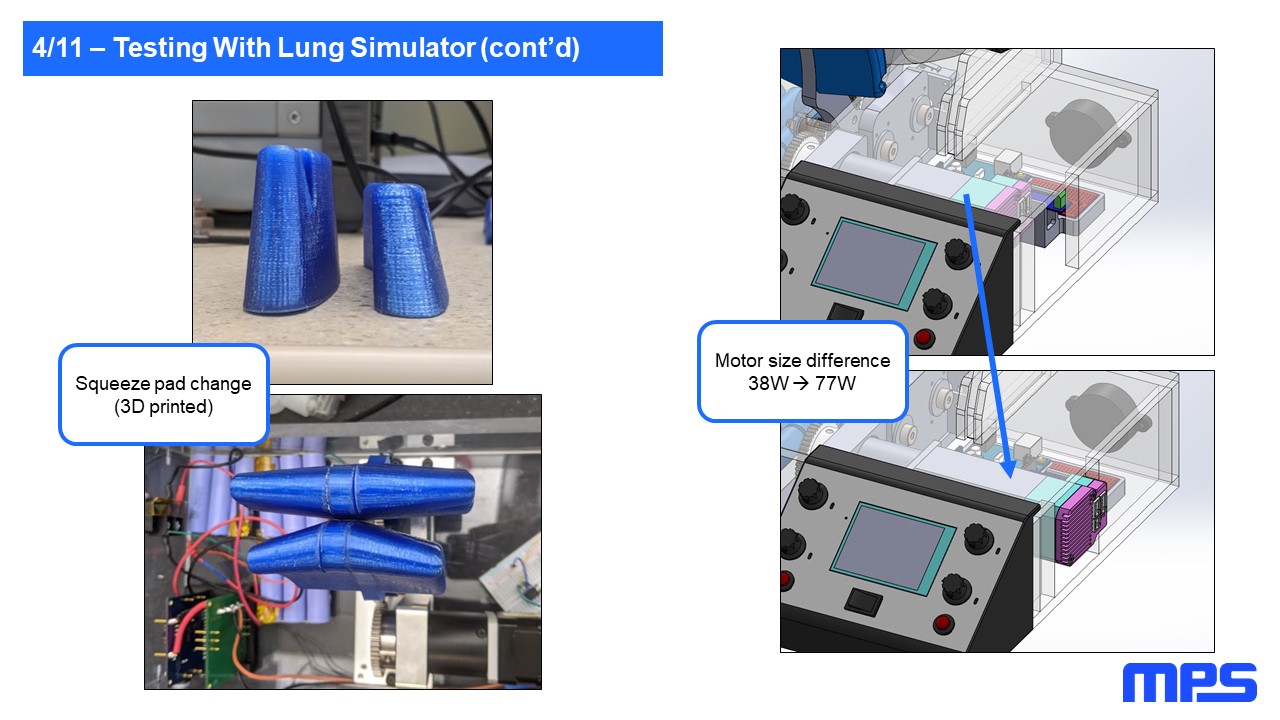
- 77W スマートモータを取り付けて、最初に使用した38Wモータと交換します
- 圧力監視機能を実装します
- 追加のアラーム機能を実装します
- FDA / EUA / WHOの要件を満たすために必要な追加機能を調査します
- このバージョンのプロトタイプの設計ドキュメントをまとめて、MPSのウエブサイトにアップロードする準備をします (市販部品のBOM、機械モデルと組立ノート、高レベルの回路図、およびArduinoコード)
状況アップデート 2020年4月11日

状況アップデート 2020年4月10日
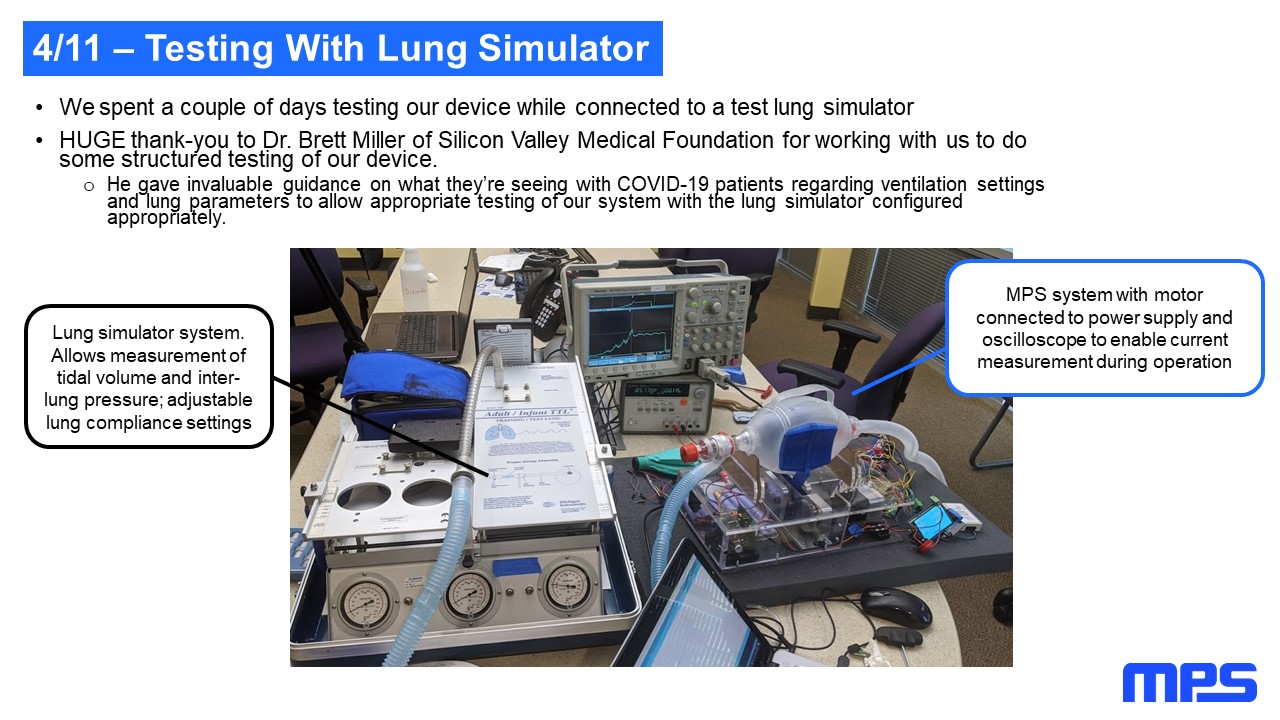
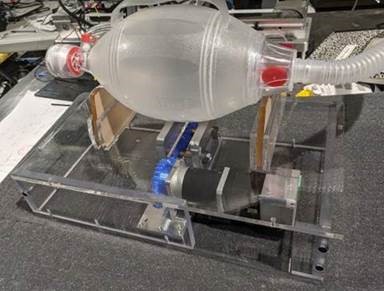
- 医師の指導の下、肺シミュレータ試験機を使用して設計と性能をレビューしました。一回の呼吸量とモータトルク上限をテストしました
- 肺の剛性と圧力の要件の最大条件下でのボリュームデリバリを増やすためのアーム設計を更新
- モータのピーク要件の確認
- 今後のステップ:
- アームデザインの更新
- アーム位置の初期化 / 起動ルーチンを統合し、リミットスイッチが取り付けられました
- 医師の推奨に従って、気流と圧力の測定回路を最適化するための追加の取付け/配管を位置決めし調達します
- システムの配線 / 美観をクリーンアップ (両方の電源回路に緊急停止を統合し、ノブを移動し、より優れた統合コントロールパネルに表示するなど)
- 追加のアラーム機能を実装する
- 圧力表示とアラームを備えた圧力センサの校正とテスト
状況アップデート 2020年4月8日
- 一回呼吸量、BPMおよびI / Eの調整に有効に機能する機械的機能
- 主入力電力喪失の場合のバッテリバックアップを含む、実験室の電源から独立してシステムを実行するための統合MPS電力管理ハードウェア
- 圧力監視の統合とメインアームの初期化ルーチンに取り組んでいます
- 絞りアームを除いて機械加工部品が出来上がっています。プラスチック製のハウジングが組み立てられ、モータには3Dプリントされたギアが取り付けられています
- バッグサポートは交換可能で、バッグの位置を上げ下げできるようにいくつかのセットを用意しました。また、必要に応じてバッグを所定の位置に保つために、シンプルなゴムバンドのアタッチメントを追加する予定です
 |
 |
 |
アカウントにログイン
新しいアカウントを作成