MPQ3910Aリファレンスデザイン - LiDARアプリケーションのAPD用高電圧昇圧

1. 概要
1.1 説明
自動運転車は以前から話題になっていましたが、今では現実のものとなりつつあります。高度な自律性を可能にするために、車両は、周囲を検出するための組み合わせ手法 (カメラ、レーダー、およびLiDAR) を使用しています。
LiDARは幅広いデバイスです。レーダーと同じように機能しますが、RF波の代わりに光波を使用します。レーザーダイオードが光パルスを放出し、高度なフォトダイオード (APD) が反射を検知して、飛行時間や反射物体までの距離を決定します。
これらのタイプのフォトダイオードは、そのサイズに応じて最大300Vが必要なため、LiDARシステムに関する重要な設計上の課題は、APDセンサにバイアスをかけるための適切な高電圧電源を提供することです。電源はコスト・パフォーマンスにすぐれ、車載用のEMC規制に準拠している必要があります。
このリファレンスデザインでは、MPQ3910Aを使用して、DCMで動作する昇圧コンバータを制御します。この設計により、非常に高いデューティサイクルによるLiDARの制限を克服するために、費用対効果が高く、スペースを節約する部品が可能になります。昇圧された電圧は、より低い電圧定格の半導体を使用しながら、350V以上の出力能力を実現するチャージポンプを通じて効果的に2倍になります。これらの半導体は、高電圧のものよりも小型で安価であり、性能もすぐれています。
1.2 機能
- CISPR-25 Class5準拠
- 5V〜35Vの広い動作入力範囲
- 12V/1A対応のシングルNチャネルMOSFETゲートドライバ
- 設定可能な30kHz〜400kHzの周波数
- 外部80kHz~400kHz同期クロック
- 設定可能なソフトスタート (SS)
- 過電流保護 (OCP)
- 出力過電圧保護 (OVP)
- 短絡保護 (SCP)
- 外部電源オプション付き内部 LDO
- 軽負荷時のパルススキップ動作
- MSOP-10パッケージで提供
- AEC-Q100認定

図1 : 評価ボード
1.3 アプリケーション
- 車載用LiDAR用APD電源
2 リファレンスデザイン
2.1 簡略化された回路図
MPQ3910Aは、定格入力12V、出力300V/15mA、EMIフィルタ、極性保護を備えた昇圧コンバータです。図2は、MPQ3910Aのブロック図です。
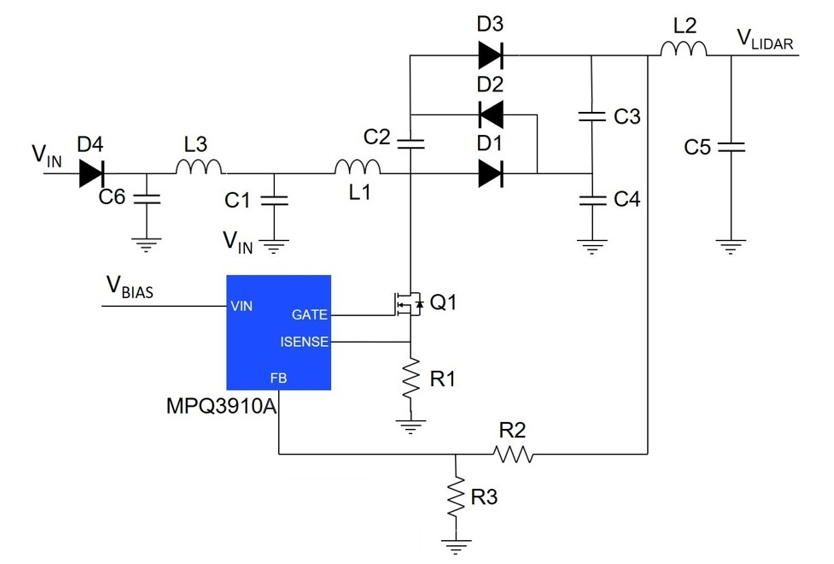
図2 : MPQ3910Aブロック図
2.2 関連ソリューション
このリファレンスデザインは、次のMPSソリューションに基づいています。
| MPSの集積回路 | 概要 |
| MPQ3910A | 5V~35V入力、ピーク電流モード、非同期昇圧コントローラ、AEC-Q100認定 |
2.3 システム仕様
| パラメータ | 仕様 |
| 入力電圧範囲 | 3VDC〜35VDC |
| 出力電圧 | 300VDC |
| 最大出力電流 | 15mA |
| スイッチング周波数 | 375kHz |
| ボードのフォームファクタ | 89mm x 63mm x 5mm |
| ピーク効率 | 83% |
| 300V出力リップル | 200mVP-P |
3 設計
3.1 回路図

図3 : 回路図
3.2 BOM
| 識別子 | 数量 | 値 | パッケージ | メーカー | メーカーP/N |
| C1、C3、C16 | 3 | 0.1µF、250V | 0805 | TDK | CGA4J3X7T2E104K125AE |
| C2、C4 | 2 | 0.47µF、250V | 1812 | Murata | GCJ43DR72E474KXJ1L |
| C5 | 1 | 15nF、50V | 0603 | Murata | GCM188R72A153KA37D |
| C6、C8、C9 | 3 | 4.7µF、50V | 0805 | TDK | CGA4J3X5R1H475M125AB |
| C7 | 1 | 47µF、50V | 6x6 | Panasonic | EEE-FT1H470AP |
| C10 | 1 | 0.47µF、450V | 1812 | TDK | C4532X7T2W474M230KE |
| C11 | 1 | 1µF、50V | 0805 | Murata | GCM21BR71H105KA03L |
| C12 | 1 | 4.7µF、25V | 0805 | TDK | CGA4J1X7R1E475K125AC |
| C13 | 1 | 0.47µF、16V | 0603 | Murata | GCM188R71C474KA55D |
| C15 | 1 | 6.8nF、16V | 0603 | Murata | GCM188R72A682KA37D |
| D1、D2、D3 | 3 | BAS21 | SOD-323 | Rohm | BAS21VMFHTE-17 |
| D4 | 1 | NRVTS245ESFT3G | SOD-123 | ON Semiconductor | NRVTS245ESFT3G |
| D5 | 1 | SMBJ30CA-E3/52 | SMB | Comchip | ATV06B240JB-HF |
| D6 | 1 | PMEG6010CEJ | SOD-323 | Nexperia | PMEG6010CEJ,115 |
| L1 | 1 | 12µH、1.75A | 6235 | Coilcraft | LPS6235-123MRB |
| L2 | 1 | 4.7µH、0.6A | 0805 | Murata | LQM21PZ4R7NGRD |
| L3、L4 | 2 | 1µH、1.3A | 0805 | Murata | LQM21PZ1R0NGRD |
| Q1 | 1 | SQJ454EP | SO-8FL | Vishay | SQJ454EP-T1_GE3 |
| R1、R3、R13 | 3 | 0Ω、5% | 0603 | Vishay Dale | CRCW06030000Z0EB |
| R2、R7、R8、R9、R10 | 5 | 100kΩ、1% | 0603 | Vishay | CRCW0603100KFKEA |
| R4 | 1 | 6.2kΩ、1% | 0603 | Panasonic | ERJ-3EKF6201V |
| R5 | 1 | 50mΩ、1% | 1206 | Panasonic | ERJ-8CWFR050V |
| R6 | 1 | 7.5kΩ、5% | 0603 | Vishay | CRCW06037K50FKEA |
| R11 | 1 | 82kΩ、1% | 0603 | Vishay | CRCW060382K0FKEA |
| R12 | 1 | 2kΩ、1% | 0603 | Vishay | CRCW06032K00FKEA |
| U1 | 1 | MPQ3910 | MSOP-10 | MPS | MPQ3910GK-AEC1 |
3.3 PCBのレイアウト

図4 : PCB レイヤー1

図5 : PCB レイヤー2

図6 : PCB レイヤー3

図7 : PCB レイヤー4
4 テスト結果
4.1 効率およびレギュレーション
VOUT = 300V、L = 12µH、fSW = 375kHz、TA = 25ºC

図8 : 効率 VS. 負荷電流

図9 : ラインレギュレーション

図10 : ロードレギュレーション
4.2 時間領域波形
VIN = 12V、VOUT = 300V、L = 12µH、fSW = 375kHz, TA = 25ºC
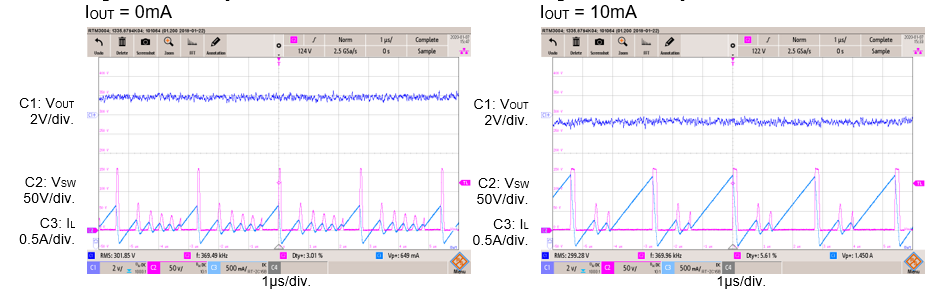
図11 : 定常状態 - 図12 : 定常状態

図13 : VINによる起動 - 図14 : VINによる起動

図15 : VINによるシャットダウン - 図16 : VINによるシャットダウン

図17 : ENによる起動 - 図18 : ENによる起動

図19 : ENによるシャットダウン - 図20 : ENによるシャットダウン

図21 : 単一ロードステップ - 図22 : 単一ロードステップ

図23 : 繰り返しロードステップ、5kHz - 図24 : 繰り返しロードステップ、10kHz

図25 : 繰り返しロードステップ、20kHz - 図26 : 繰り返しロードステップ、50kHz
アカウントにログイン
新しいアカウントを作成