磁気角度センサ : 解決策の説明

はじめに
光学式エンコーダは機能的に類似しているため、磁気エンコーダ (機械シャフトに取り付けられた磁石の角度をデジタル形式で提供するデバイス) の主な特性として「分解能」がよく使用されます。分解能は、センサが分解できる最小の角度を示すため、重要なパラメータです。残念ながら、製品を比較する場合、しばしばユーザーの誤解を招く可能性があります。これは、分解能が市販用文書と技術文書の両方において異なる方法で定義されているためです。
本稿では、さまざまな製品のデータシートで確実に判断できるように、分解能を定義する上で最も意味のある方法を提案します。また、磁気エンコーダの場合、分解能だけでは製品を適切に比較できないことも示します。多くの磁気位置センサのデータシートにはないことが多いセンサ帯域幅も、磁気角度センサを比較するためには必要です。
測定誤差
分解能を定義する前に、測定誤差に関するいくつかの点を明確にすることが重要です。測定誤差は、量の測定値とその真の値との差として定義されます。この誤差は、次に説明する2つの構成要素に分けることができます。
- 系統 (またはバイアス) 誤差 : 系統誤差は、同じ条件下で実行された複数の測定で一定に保たれる構成要素です。この誤差は、多数の測定値の平均と測定量の真の値との差として推定できます。
- ランダム誤差 : 確率誤差は、トータルの誤差から系統誤差を差し引いたものです。これは、同じ条件下で実行された一連の測定における予測不可能な変動を表します。
図1は、ランダム誤差と系統誤差のさまざまな組み合わせを示しています。測定値には3つのグループがあり、ランダム誤差と系統誤差の量が異なります。グループAはランダム誤差が大きく、グループBは系統誤差が大きく、グループCは似たような値のランダム誤差とシステム誤差を持っています。
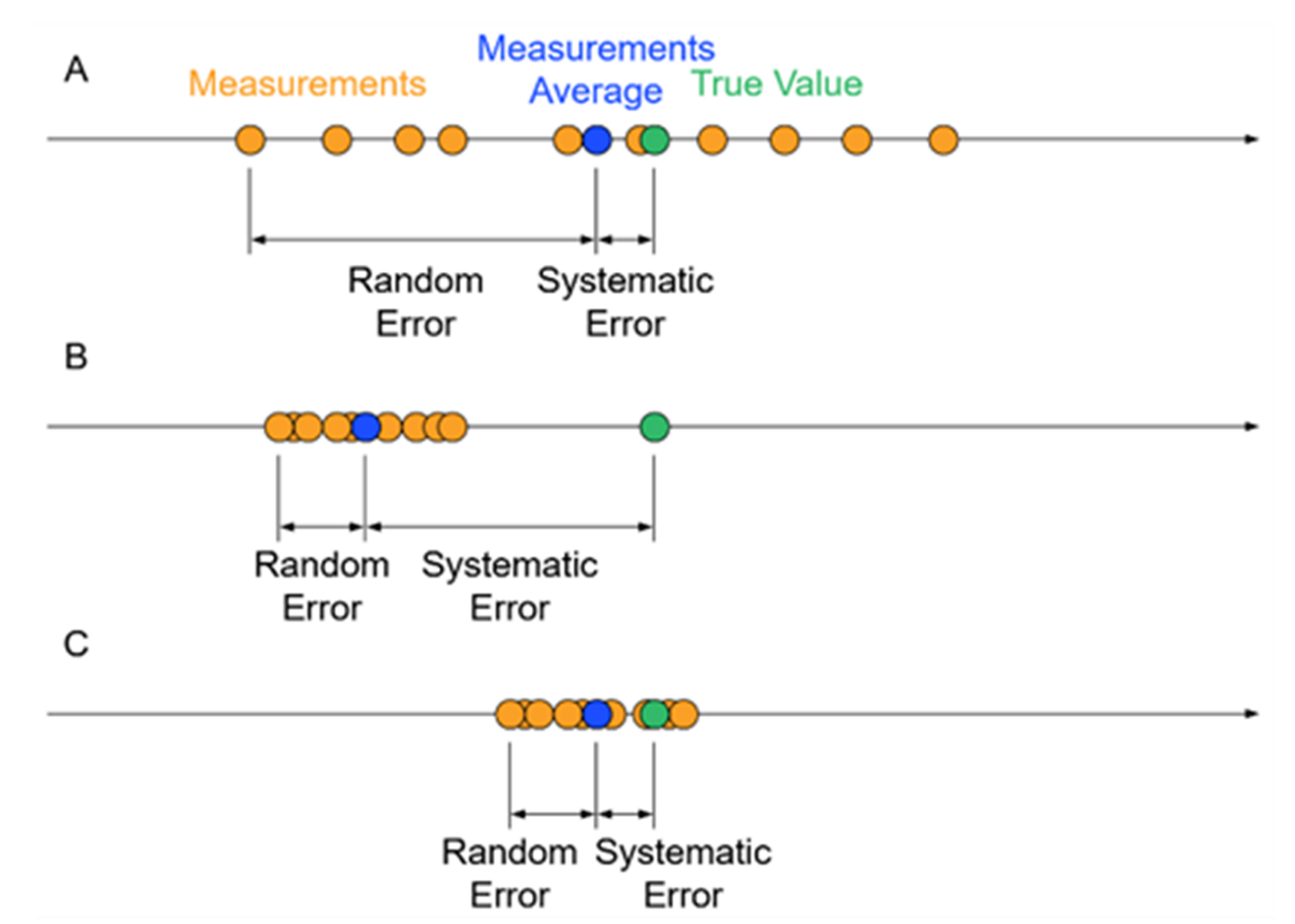
図1 : ランダム誤差と系統誤差の組み合わせ
磁気角度センサのデータシートでは、系統誤差とランダム誤差はそれぞれINLと分解能として表されます。簡単にするために、本稿ではセンサに系統誤差がないと仮定します。つまり、平均値を真の値として仮定します。
関連コンテンツ
-
ビデオ
サーボ制御ループの角度位置センサの分解能と帯域幅を理解する
磁気角度位置センサの主な仕様と利点を探る
-
寄稿文
磁気センサによる信頼性を向上する触覚HMIの最適化
比類のない長寿命と低消費電力を備えた非接触で費用効果の高いHMIソリューションを設計するための簡単な設計ガイドラインについて学びます
-
事例

MA600の使用事例 : 精密ロボット光学
MA600は、光学式エンコーダと厳密に競合し、市場に出回っている既存のホールベースの角度位置センサのすぐれた代替品を提供します。
-
アプリケーションブロック

ロボット工学
ロボット工学におけるMPSの統合モータ・ドライバおよびバッテリ管理ICソリューションを探ります
標準偏差と信頼性
測定におけるランダム誤差の量を定量化するために使用できる測定基準は、標準偏差 (σ) です。統計で、σは一連のサンプルの分散を平均値の周りで測定します。分散が大きいほど、σは高くなります。このパラメータは、二乗平均平方根 (RMS) ノイズとも呼ばれます。
一連の測定値は、多くの場合、ガウス曲線または正規曲線とも呼ばれる釣鐘型の曲線分布に従います (図2参照)。これは、ランダムな変動が過去の誤差に依存しない場合です。ガウス曲線は測定値の平均 (µ) でピークに達し、σはその幅を特徴付けます。ガウス曲線の下の合計面積が1に正規化されていると、値の幅 [a1, a2] で区切られた領域は、測定結果がa1とa2の間のどこかに入る確率になります。幅が大きいほど、1回の測定がその範囲に収まる信頼性が高くなります。
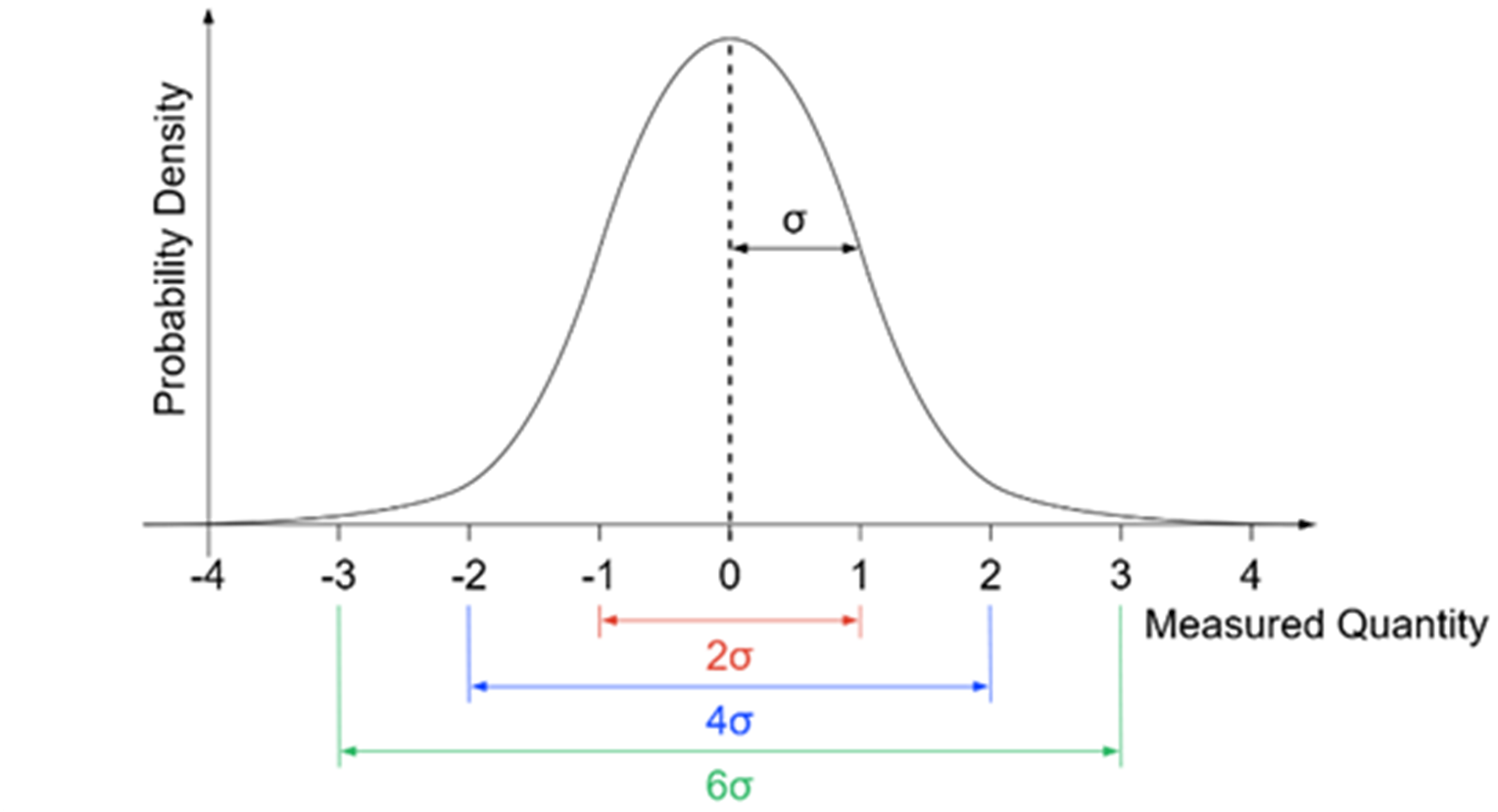
図2 : µ=0およびσ=1のガウス分布
表1に、測定値が範囲 [µ -nσ, µ+nσ] に含まれる確率または信頼性を示します。
表1 : nの値に対する信頼係数
| n | 信頼性 (%) |
| 1 | 68.269 |
| 2 | 95.450 |
| 3 | 99.730 |
| 4 | 99.993 |
分解能の定義
アメリカ国立標準技術研究所 (NIST) は、分解能を「測定結果の特性における小さな変化を検出し、忠実に示す測定システムの能力」と定義しています。
分解能は、計測器が検出できる最小の間隔です。この間隔を決定するために、本稿ではランダム誤差の分布がガウス分布に従うものと想定します。これは、「かなり高い確率で両方の角度を区別できるようにするには、2つの角度はどれくらい離れている必要があるだろうか?」という質問につながります。
2つの角度の間の距離が6σよりも小さい場合、角度を中心とする2つのノイズ分布は大きく重なります (図3の「A」で表示)。測定結果が重複領域にあると、本当の角度が角度a1であるかa2であるかを知ることはできません。2つの角度の間の距離が6σ以上の場合にのみ、1回の測定で99.73%以上の信頼度により、これら2点を区別できます (図3の「B」で表示)。したがって、センサの分解能は6σ間隔です。
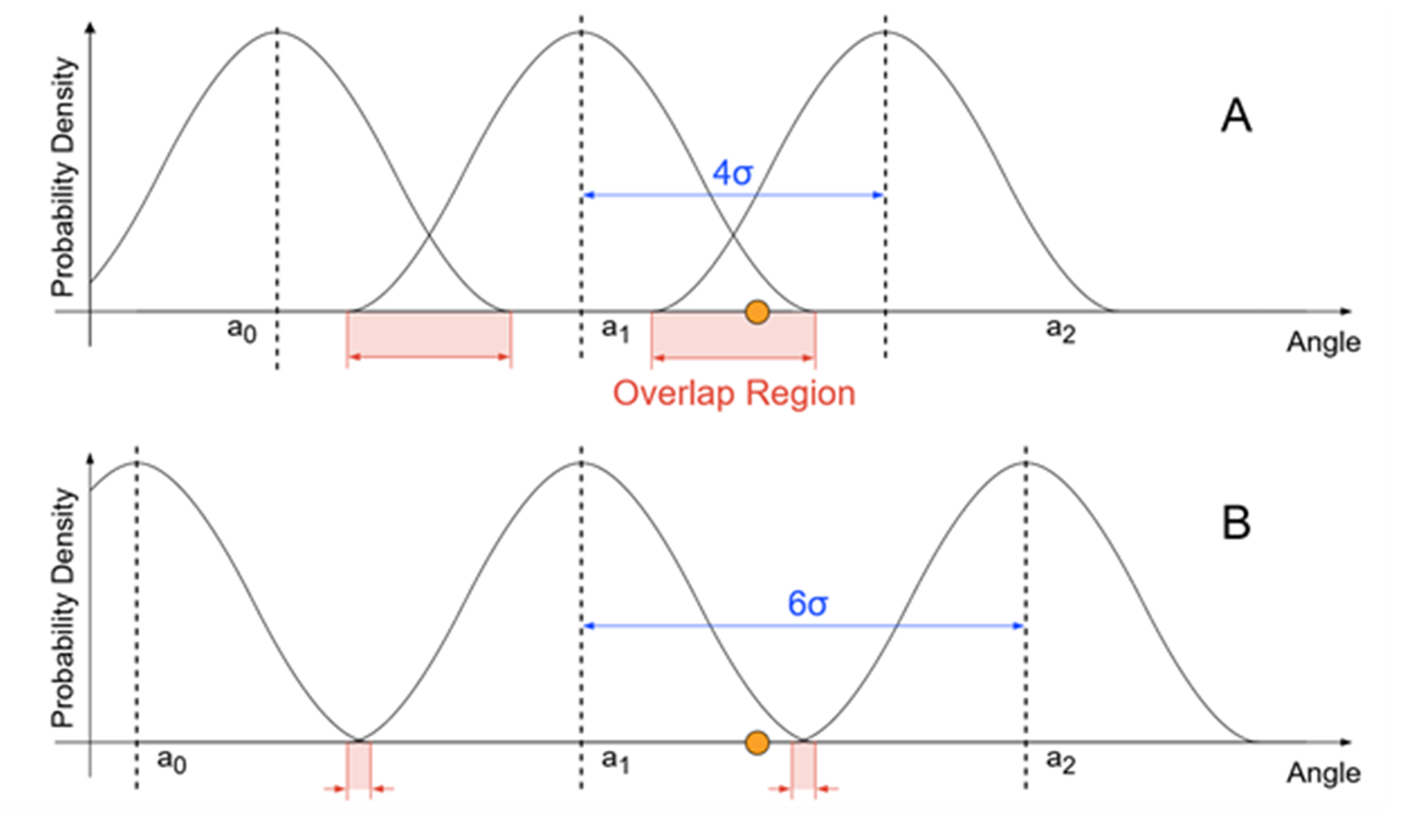
図3 : µ1を中心とした6σの間隔に含まれるサンプル
アナログからデジタル (AD) への変換
一般に、位置センサの出力はデジタル形式で与えられます。たとえば、ABZまたはSPIインタフェースを通して提供される場合があります。この状況では、磁気センサからのアナログ信号をデジタル化する必要があります。図4に、デジタル磁気角度センサの簡略化したブロック図を示します。この図には、次のセクションで詳しく説明するフィルタブロックが含まれています。
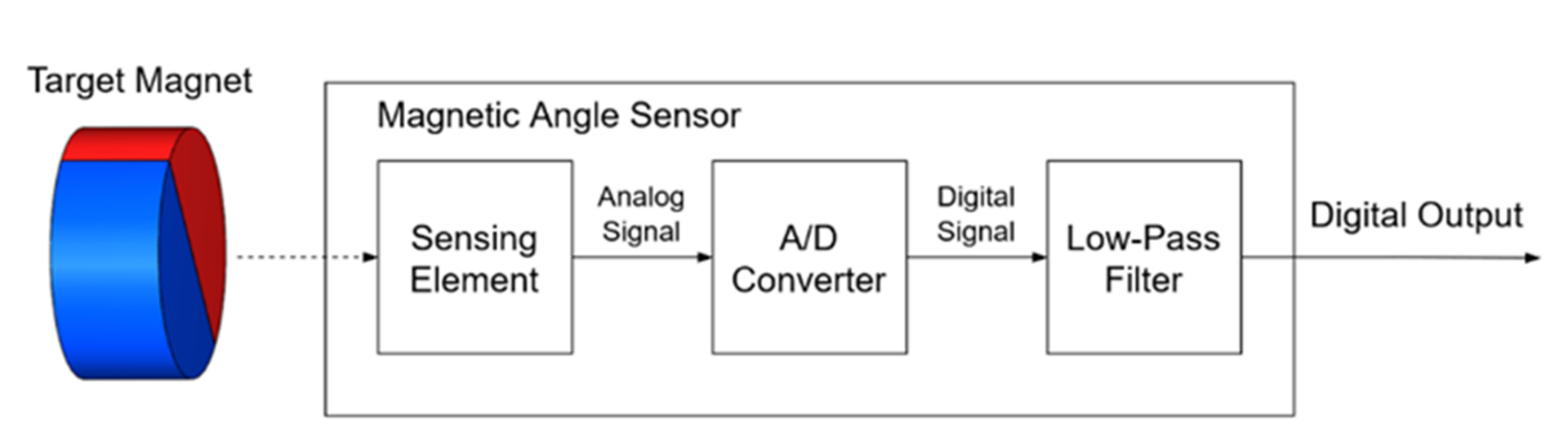
図4 : デジタル磁気角度センサ
AD変換のステップサイズ (つまり、アナログ領域の値の幅をデジタル領域のステップ数で割ったもの) が、しばしばセンサの分解能として誤って解釈されることがあります。この解釈は、アナログ信号のピーク・ツー・ピークノイズがAD変換のステップサイズよりも小さい場合にのみ正しくなります。
ただし、これはほとんどの場合で当てはまりません。アナログ信号のピーク・ツー・ピーク ノイズは多くの場合、ADステップを超えるため、出力の最下位ビット (LSB) のランダムなフリッカーとしてセンサのデジタル出力に現れます。これが、A/Dコンバータ (ADC) メーカーが「ノイズのない分解能」や「ピーク間分解能」などの指標を定義した理由です。
図5は、ノイズがアナログ領域からデジタル領域に伝達される様子を示しています。この例では、ステップサイズは1ですが、ピーク・ツー・ピークノイズは6です。さらに、連続分布と離散分布がそれぞれX軸とY軸に表示されています。ノイズはデジタルステップを超えるため、ステップサイズを小さくしても分解能は向上しません。
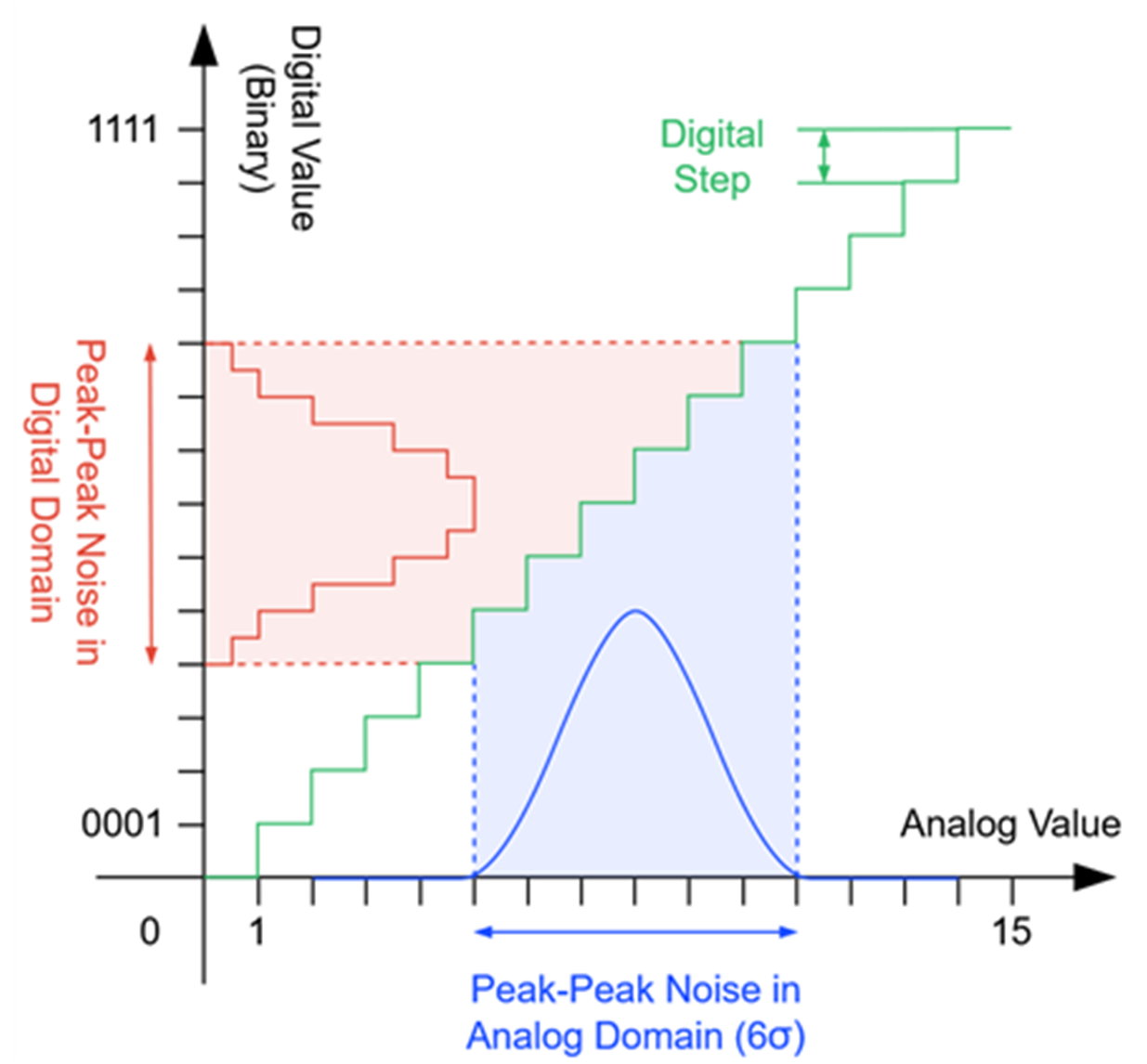
図5 : AD変換時のノイズ
デジタル形式で測定値を提供する場合、分解能は式 (1) で計算されるビットで表すこともできます。
$$分解能_{bit} = log_2 \frac {FS}{6 \sigma}$$ここで、FSは測定される量のフルスケールです。
角度測定の場合、FS = 360°で、分解能は式 (2) で推定できます。
$$分解能_{bit} = log_2 \frac {360}{6 \sigma}$$帯域幅
センサの性能について議論する際に見落としがちな重要なパラメータは、カットオフ周波数とも呼ばれる帯域幅です。センサの帯域幅は、センサで測定できる信号の周波数幅に対応します。センサ帯域幅よりも大きな周波数の信号は減衰します。センサの詳細な特性評価には、分析またはグラフ形式での伝達関数が必要です。最低限、カットオフ周波数を提供する必要があります。
図4は、センサにローパスフィルタ段を実装できることを示しています。これにより、センサ出力のノイズが減少します。この場合、センサの帯域幅はフィルタの帯域幅と同じです。ノイズ分布がガウス分布の場合、フィルタ帯域幅を4分の1に減らすと、ノイズが2分の1に減少し、分解能が1ビット増加します。これは、ノイズまたは分解能に関する情報が帯域幅に関する情報に対応する必要があるということです。
アプリケーションに対して低すぎる帯域幅は、劇的な影響を与える可能性があります。センサが制御ループ内で使用される場合、システムが不安定になる可能性があり、モータが振動、ノイズ、および / または効率の低下を示す可能性があります (図6参照)。この図で、Rは位置基準、AMはモータシャフト角度、ASはセンサ出力です。一般的な設計ルールは、フィルタ帯域幅を制御システムまたは制御ループの帯域幅の少なくとも10倍にすることです。
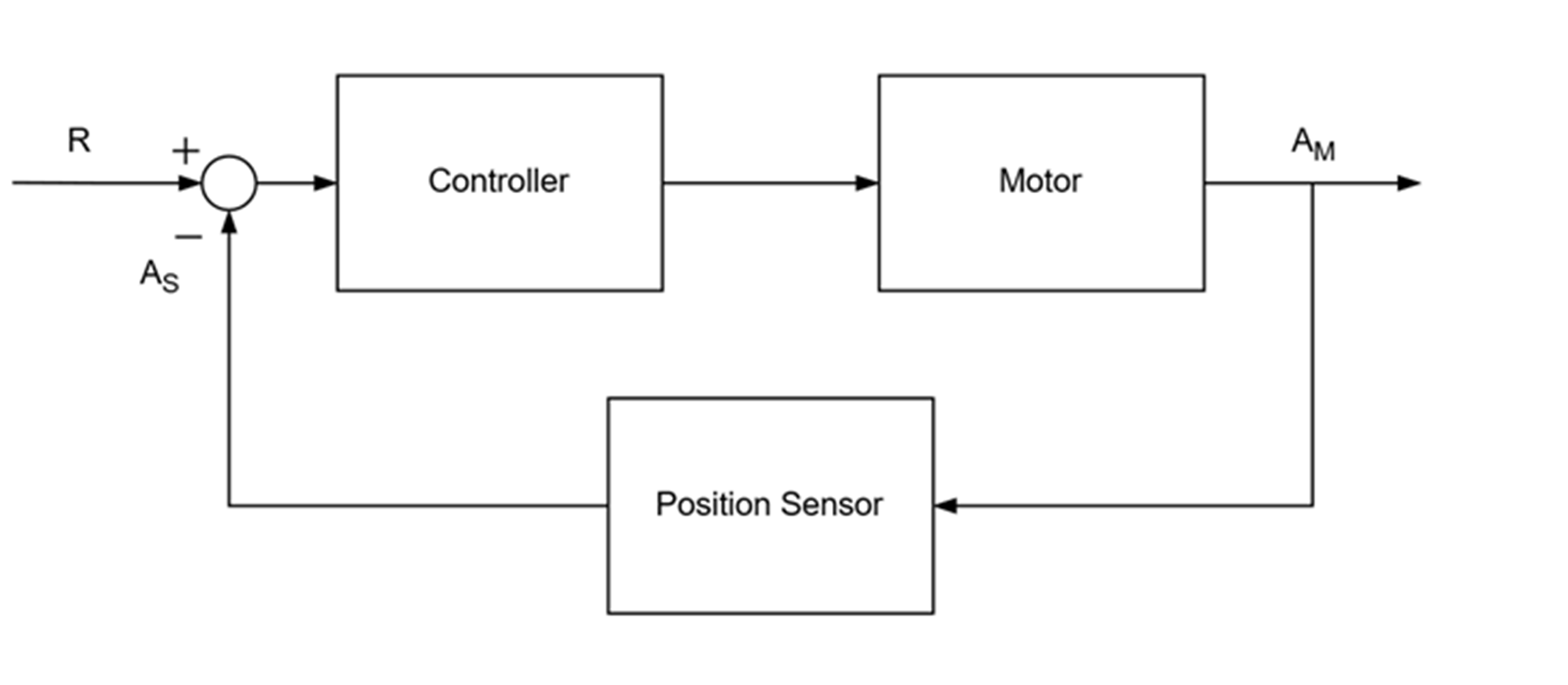
図6 : モータ制御ループ
図7、図8、および図9は、それぞれ角度測定、ノイズ、および制御ループ性能に対するローパスフィルタの帯域幅 (BW) の影響を示しています。
図7は、高いBWフィルタ下でモータシャフト角度とセンサ出力がほぼ重なっていることを示しています (それぞれ青と緑の線で表示)。一方、より低いBWフィルタを使用したセンサ出力は、モータシャフトの位置に正確に追従できません (赤い線で表示)。

図7 : センサ出力に対する異なるフィルタ帯域幅の影響
角度にBWフィルタを使用すると、ノイズが大幅に減少します (図8参照)。帯域幅が狭くなるにつれて、ノイズはさらに減衰します。
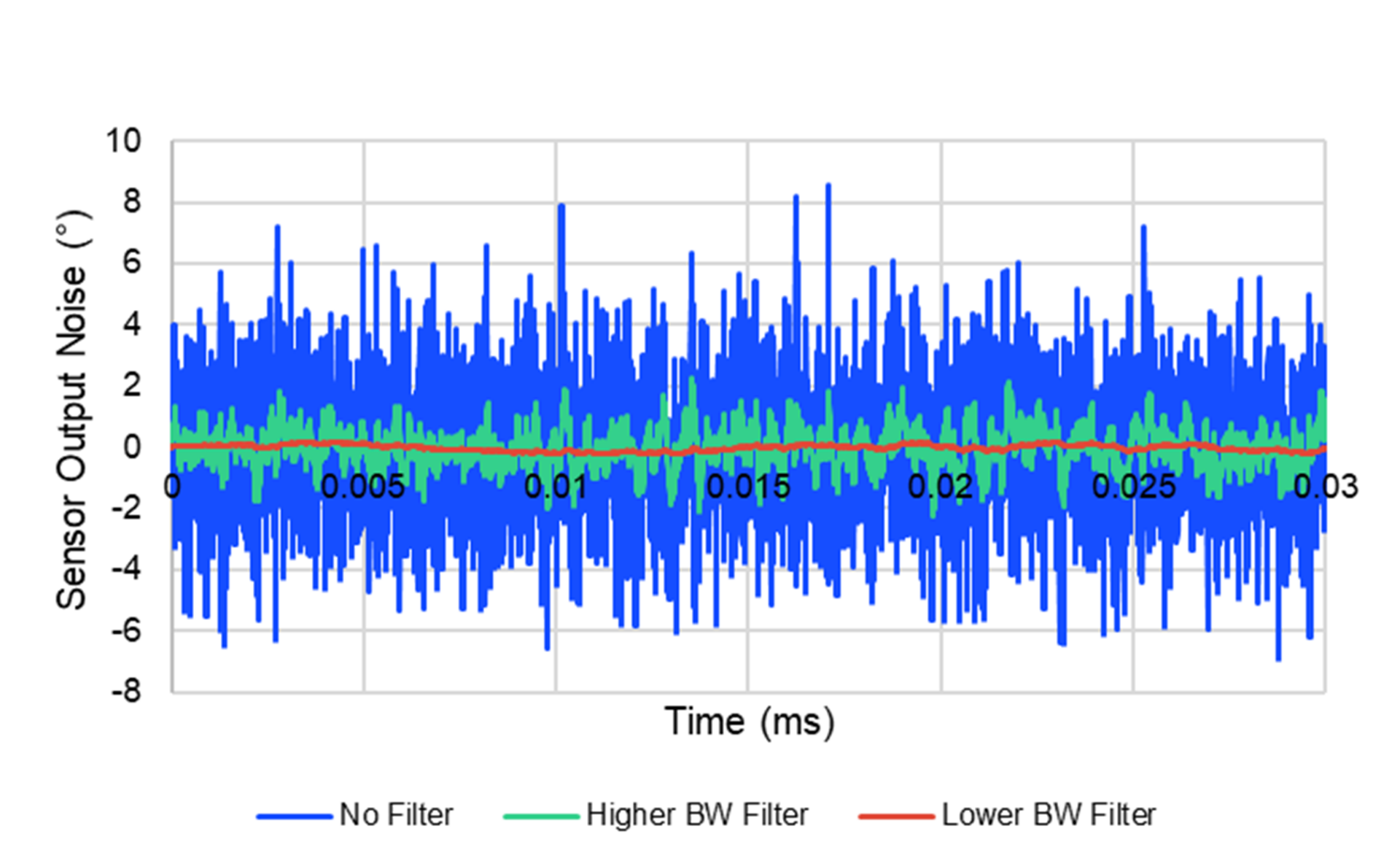
図8 : センサ出力に対する異なるフィルタ帯域幅の影響
図9は、さまざまなフィルタ帯域幅がモータ制御ループの性能にどのように影響するかを示しています。フィルタの帯域幅が低い場合 (赤い線で表示)、オーバーシュートが多くなり、整定時間が長くなります。
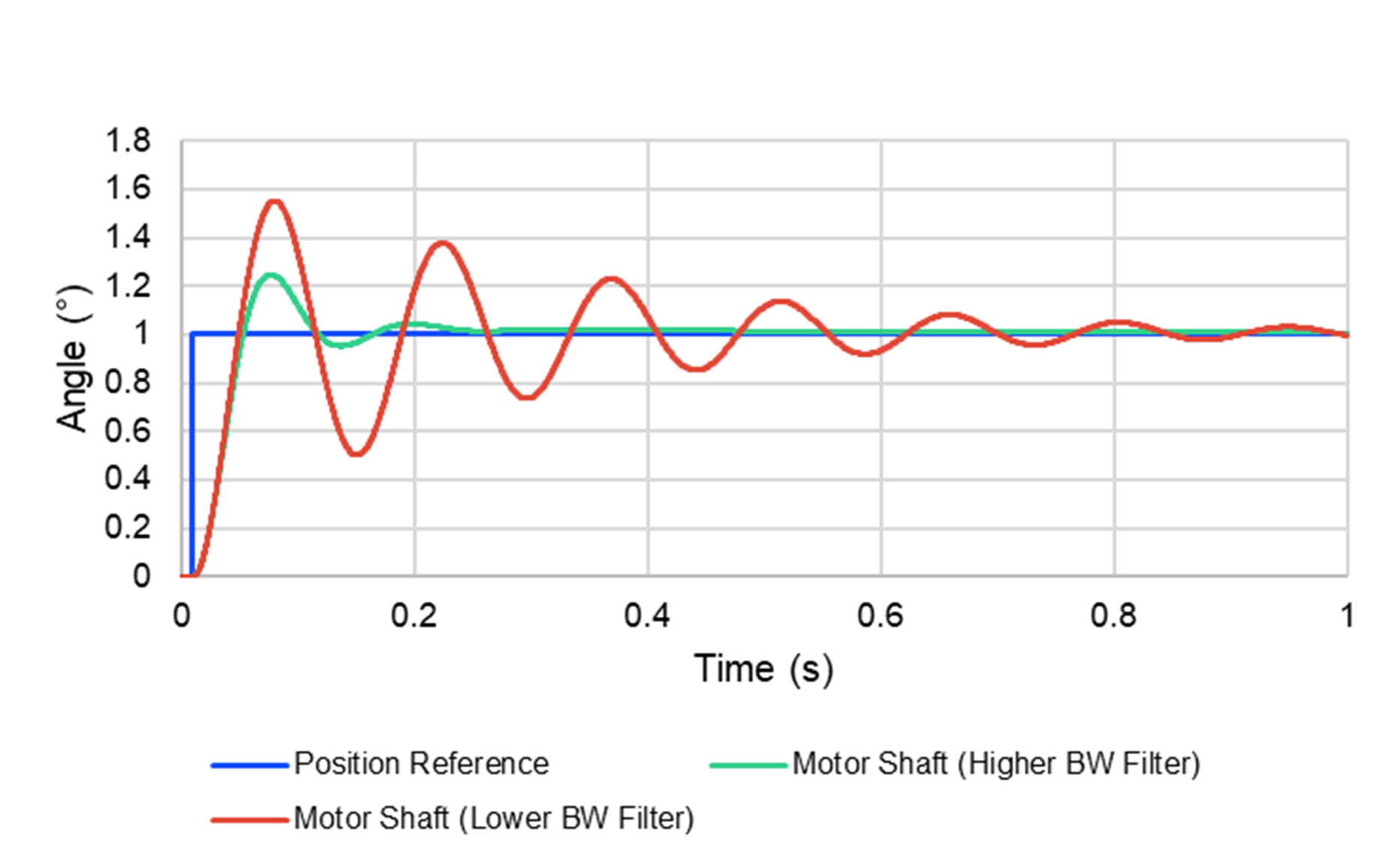
図9 : モータ制御ループの性能
データシートで探すべきもの
センサがアプリケーションに適していることを確認するには、デジタルステップと実際のセンサ分解能を区別することが重要です。
しばしば、SPI分解能、AD分解能、ABZ分解能などの用語が使用される場合、それらは測定のデジタル表現に使用されるビット数を表すものですが、実際のセンサ分解能を表すものではありません。
RMSノイズ、ピーク・ツー・ピークノイズ、角度ノイズ、またはノイズ密度などの仕様がセンサのデータシートに含まれている場合、それらは通常、センサの分解能を取得するための最も信頼できるソースになります。次に、設計者は式 (1) を使用して、ビットで表される分解能を計算できます。
表2は、データシートの例を示しています。この状況では、分解能は実際にはデジタルステップを参照しているため、誤解を招きかねません。フィルタ帯域幅が設定可能な場合、複数のノイズ値が記載される場合があります。表に示されている最小ノイズ値を使用すると、分解能は式 (3) で計算できます。
$$分解能_{bit} = log_2 \frac {360}{6 \sigma} = log_2 \frac {360}{0.06} = 12.55$$分解能と帯域幅の両方を比較することで、製品間の実際の性能の違いを特定できます。フィルタ帯域幅は、時定数、ステップ応答、カットオフ周波数などのいくつかのパラメータで表すことができます。表2は、フィルタの時定数とフィルタのカットオフ周波数を使用した例を示しています。
表2 : データシートの例
| パラメータ | シンボル | 条件 | 最小 | 代表値 | 最大 | 単位 |
| 分解能 | RES | - | 14 | - | ビット | |
| RMSノイズ | σ | フィルタ設定 = 0 | 0.004 | 0.08 | 0.14 | deg |
| フィルタ設定 = 3 | 0.006 | 0.01 | 0.017 | deg | ||
| フィルタ時定数 | τ | フィルタ設定 = 0 | - | 125 | - | µs |
| フィルタ設定 = 3 | - | 1000 | - | µs | ||
| フィルタのカットオフ周波数 | fCUTOFF | フィルタ設定 = 0 | - | 3000 | - | Hz |
| フィルタ設定 = 3 | - | 350 | - | Hz |
MPSセンサの性能
多くのMPSの角度センサでは、データのデジタル表現は16ビットです。一方、分解能、検出技術 (ホールまたはTMR)、およびフィルタ帯域幅は、部品によって異なります。
表3に、MagAlphaファミリの一部のセンサの分解能と帯域幅の値を示します。一部のセンサには設定可能なフィルタ帯域幅があり、さまざまなアプリケーション要件に適応できますのでご注意ください。
表3 : MagAlphaファミリ
| 製品型番 | 45mT(ビット)での分解能 | フィルタ帯域幅 (Hz) | テクノロジー | 代表的アプリケーション |
| MA600 | 14.5〜12 | 150〜13000 | TMR | 閉ループ位置 / 速度制御 |
| MA732 | 14〜9 | 23〜6000 | ホール | 閉ループ位置 / 速度制御、汎用位置センサ |
| MA330 | 14〜9 | 23〜6000 | ホール | BLDCモータ転流 |
| MAQ430 | 14〜9 | 23〜6000 | ホール | 車載用 |
| MA730 | 14 | 370 | ホール | 高分解能エンコーダ |
| MA704 | 10 | 3000 | ホール | 閉ループ位置 / 速度制御 |
| MA780 | 12〜8 | 39〜160000 | ホール | 低電力 |
| MA800 | 8 | 90 | ホール | HMI |
この表は、TMRセンシング技術がMA600センサ内部でどのように使用され、ホール効果ベースのセンサと比較して、より高い帯域幅ですぐれた分解能を実現するのに役立つことも示しています。
結論
本稿では、確率誤差の説明から始まる分割能の定義と、標準偏差と信頼性の統計的概念について説明しました。また、デジタル形式で提供される場合のデジタル表現 (センサ出力で提供されるビット数) とセンサ測定の分解能の違いも明確にしました。
本稿では、フィルタリングの効果を示すことで、製品の実際の性能を判断するには分解能と帯域幅の両方を考慮する必要があることを証明しました。最後に、本稿では、代表的な磁気角度センサのデータシートの例を示し、そこに含まれる情報を正しく解釈する方法を紹介しました。
_______________________
興味のある内容でしたか? お役に立つ情報をメールでお届けします。今すぐ登録を!
アカウントにログイン
新しいアカウントを作成