MagAlpha磁気角度センサファミリの紹介

役立つ情報を毎月お届けします
プライバシーを尊重します
はじめに
位置または速度を検出する機能は、多くの機械システムの制御と監視における基本的な要件です。電動アクチュエータなどのアプリケーションでの低速位置測定は、歴史的に抵抗膜ポテンショメータを使用してきました。サーボモータなどの高速アプリケーションでは、通常、光学式エンコーダが使用されてきました。
ポテンショメータは安価ですが、可動接点ベースのアセンブリであるという欠点があります。これにより、機械的接点の摩耗や、湿気や汚れの侵入などの外部環境要因による損傷を受けやすくなります。光学式エンコーダは高精度を提供しますが、その構造が複雑であるため、価格が高くなります。エンジニアは、ホール効果センシングを実装する非接触回転磁気角度センサを使用することで、このジレンマを解決できます。
MagAlphaセンサには次の利点があります。
- SPI、ABZ、PWM、およびUVWインタフェースのオプションを使用した8〜14ビットの角度分解能
- 高い信頼性と長いアプリケーション寿命のための非接触磁気センシング
- 費用効果が高く、省スペースのパッケージ
- シャフトマグネットサポートの端または側面による機械的柔軟性
MPS MagAlphaセンサは、測定対象の磁場の水平ベクトルを感知する独自の垂直ホールプレート要素のアレイを利用します。この磁場は通常、センサの上または側面に配置された双極子の直径方向に分極された磁石から発生します。MagAlpha Hallアレイのセンシング技術は、多くの磁石からセンサへの位置をサポートします (図1を参照)。
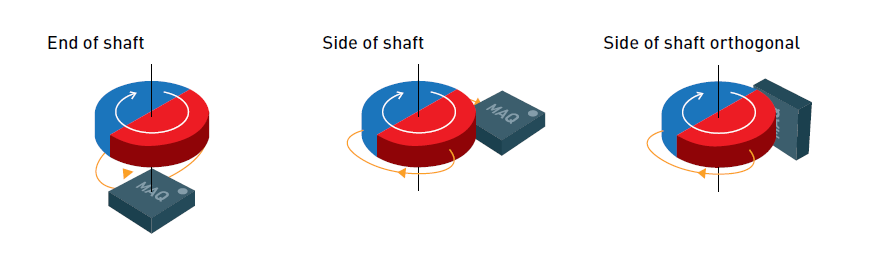
図1 : シャフトトポロジーサポートの端と側面
センサのフロントエンドには、さまざまな方向のホール要素の独自の配置が含まれています。このアレイは高速 (1マイクロ秒ごとに) で連続的にサンプリングされ、ほぼ正弦波の形をした内部信号波形を生成します。この波形のゼロ交差点での位相角は、測定される角度に直接関係します。角度サンプルは、高速カウンターを使用してデジタル化されます。このカウンターの値は、各測定期間のゼロ交差点の位相を反映しています。図2は、典型的なサンプル波形を示しています。これらの蓄積されたサンプルは、低遅延のデジタルフィルタリングブロックに渡され、ノイズが平均化され、センサ出力の解像度が向上します。フィルタの深さに応じて、最大14ビット (3シグマ) の解像度が可能です。
MPSは、この独自の「フェーズからデジタル」技術をSpinAxisTMと呼んでいます。これは、いくつかの点で従来のX - Yホールプレートおよびアークタンジェント計算手法とは異なります。従来のアークタンジェントベースのアルゴリズムでは、数百マイクロ秒の遅延が発生する可能性があり、その結果、角度の遅れが大幅に大きくなります (報告された角度と実際の機械的角度)。フロントエンドの高速サンプリングレートとデジタルフィルタの低遅延設計により、フロントエンドキャプチャから出力インタフェースで利用可能な角度情報までの角度ラグは通常わずか10µsです。
これにより、MagAlphaセンサは、非常に高い回転速度で低遅延で角度を取り込むことができます。待ち時間は約10µsに固定されているため、一定の回転速度での遅れは、単純に (10µs x 回転速度)(度/秒) です。たとえば、50,000rpmの場合、取得から出力までの角度の遅れは、毎秒300,000度 x 10µs = 3度になります。
SpinAxisTM技術は、総磁気抵抗 (GMR) または異方性磁気抵抗 (AMR) ベースの材料を使用するものなど、競合する磁気ソリューションと比較して、より広い範囲の磁場強度もサポートします。MagAlphaセンサは、15mTから100mTを超える電界強度をサポートできます。これにより、磁石の材料の選択と磁石とセンサの配置のデザインの柔軟性が高まります。

図2 : SpinAxisTMテクニック
デジタルフィルタブロック
デジタルフィルタブロックは、ターゲットアプリケーションに一致するように各MagAlphaセンサタイプで最適化されています。フィルタの深さ (処理されたサンプルの数と時間 はセンサの最終的な出力分解能に影響し、フィルタの深さが大きいほど (サンプルが多いほど) 解像度が高くなります。
より深いフィルタ深度のフォローアップ効果は、解像度が高くなるにつれてフィルタ帯域幅が減少することです (より多くのサンプルを処理するのに時間がかかるため)。同様に、帯域幅が減少すると、関連するフィルタの時定数が増加します。これはループ応答時間に影響を与え、角度の変化率または回転速度が動的に変化するシステムで使用されたときにセンサがどのように動作するかを決定します。MagAlphaファミリのフィルタ時定数 (tau)は、1ms〜16msの範囲です。この値を使用して、加速または減速中に結果として生じる角度遅れエラーを計算できます。速度変化時の角度遅れ誤差は、1秒あたりの度数で表した速度変化率 (つまり、加速 / 減速) にタウ値の2乗を掛けたものです。今後の記事では、この効果と、アプリケーションに適切な帯域幅を選択する方法について詳しく説明します。
センサーファミリ
MagAlphaデバイスのいくつかの範囲は、目的のアプリケーションに基づいて、さまざまなパフォーマンスと出力インタフェースタイプで作成されています。すべてのMagAlphaセンサは、デジタル角度値をSPIバスに出力し、一部のデバイスではSSIにも出力します。さらに、特定のバリアントは、モータ制御用のインクリメンタル直交ABZエンコーダ出力、PWM出力、またはUVW転流信号を提供します。その他の機能には、磁石の位置と磁場の強さをチェックするための選択可能な磁場検出しきい値、サイドシャフトモードの出力線形化レジスタ、およびプログラム可能なゼロ位置オフセットが含まれます。
サイドシャフトの線形化により、センサはホールアレイのX軸またはY軸のゲインを調整して、このモードに存在する追加の磁場ベクトルを補正し、線形出力応答を取り戻すことができます。ゼロオフセット調整は、センサの向きに磁極を手動で位置合わせする必要がないことを意味します。オフセットは、必要なゼロ角度位置に合わせてソフトウェアで調整できます。プログラム可能なすべての機能は、不揮発性のオンチップEEPROMメモリに保存できます。これらの設定は、電源を入れるたびに自動的に読み込まれます。図3に、MagAlphaセンサの一般的なブロック図を示します。
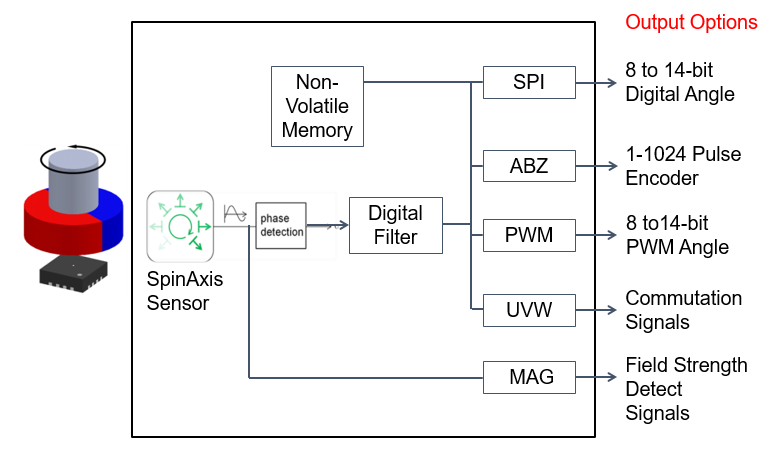
図3 : 一般的なMagAlphaブロック図
The full range of MagAlpha製品のフルレンジは、以下の表に要約されています。
|
アプリケーション |
型番 |
特徴 |
|
万能角度エンコーダ アクチュエータ |
10ビット高帯域幅 (3kHz) - 動的な閉ループ制御アプリケーションに最適化 |
|
|
位置 / 速度制御 |
12ビット中帯域幅 (390Hz) – 汎用制御に適切 |
|
|
|
低磁場、低帯域幅 (90Hz) で12ビット – サイドシャフトモード / 低磁場用に最適化 |
|
|
|
14ビット低帯域幅 (23Hz) – 高分解能、低速アプリケーション |
|
|
|
構成可能なフィルタ帯域幅を備えた9〜14ビット – アプリケーションに合わせて調整可能 |
|
|
|
|
|
|
BLDC用汎用角度エンコーダ (UVW出力) |
MA702と同じですが、ブラシレスモータ用のUVW転流信号があります |
|
|
サーボモータとアクチュエータ |
MA301 |
MA710と同じですが、ブラシレスモータ用のUVW転流信号を備え、サイドシャフトモード / 低磁場用に最適化されています |
|
|
9〜14ビット、構成可能なフィルタ帯域幅、アプリケーションに合わせて調整可能、ブラシレスモータ用のUVW |
|
|
|
|
|
|
BLDC転流用の3つのホールスイッチの交換 |
UVW出力、1〜8極ペアエミュレーション |
|
|
|
|
|
|
低電力アプリケーション |
MA780 |
自動サンプルサイクリングを備えた8〜12ビット、3mm x 3mm QFN |
|
|
MA782 |
自動サンプルサイクリングを備えた8〜12ビット、2mm x 2mm QFN |
|
|
|
|
|
ヒューマンマシンインタフェース、速度<200rpm |
8ビットSPI出力 |
|
|
|
8ビットSPI出力、1回転あたり64パルスABZ |
|
|
|
8ビットSPI出力、PWM出力 |
MA7xxファミリは、9〜14ビットのSPI出力分解能を備え、SSI、ABZ、およびPWMインタフェースをサポートします。このファミリは、アクチュエータ、エンコーダ、フィールド指向モーター制御 (FOC) など、一般的な角度検出または速度検出アプリケーションに適しています。このファミリに新たに追加されたのはMA732で、これにより、分解能、時定数、起動時間のデジタルフィルタパラメータのユーザープログラミング、および調整可能なABZヒステリシスが可能になります。
MA780およびMA782は、バッテリ駆動のデバイスなど、平均消費電力を低く抑える必要のあるアプリケーション向けに設計されています。これらは、自動スリープ、ウェイク、およびサンプル期間を備えた低電力モードを備えています。 MA780は3mm x 3mm QFNパッケージで提供されますが、MA782は小さな2mm x 2mm QFNパッケージで提供されます。
MA3xx ファミリは、9〜14ビットのSPI出力解像度を備え、ABZおよびUVWインタフェースをサポートします。 UVWインタフェースは、多くの三相ブラシレスモータに見られる3つの個別のホールセンサによって生成されるモータ転流信号を置き換えることができます。MA3xxファミリは、単純な双極子磁石を使用して、3つのホールセンサの波形をエミュレートし、1〜8極のペアを持つロータをサポートするUVW出力を生成できます。
SPI角度またはABZエンコーダ出力とUVW転流のこの組み合わせを使用すると、非常にコンパクトなブラシレスサーボモータの実装が可能になります。これは、固定子巻線に3つのホールスイッチを埋め込むことができない非常に小さな直径のマイクロモータで役立ちます。
MA330を使用すると、サーボモータ制御のループ帯域幅を最適化するためのデジタルフィルタパラメーターのプログラミングを強化し、ABZヒステリシスを調整して、特定の解像度設定で1ターンあたりのパルス数を増やすことができます。
3つのホールセンサを交換したいだけの非サーボアプリケーションの場合、MA102はUVW信号のみを提供する最小限の機能があるソリューションです。これらは、センサワイヤリングルームからモータコントローラに戻る信号対雑音比を向上させるために、相補的な出力極性を備えています。
車載用アプリケーションの場合、MAQ470およびMAQ430は、それぞれMA702およびMA30212ビット角度センサのAECQグレード1バージョンです。これらは-40°C〜+ 125°Cの動作をサポートし、車両アプリケーションのキャビンおよびボディセンサ電子機器での使用に適しています。典型的なアプリケーションには、インフォテインメントコントロール、HVACフラップ角度コントロール、およびポップアウトドアハンドルが含まれます。
最後に、単純なロータリユーザーインタフェースアプリケーションの場合、8ビットパーツのMA8xxファミリは、機械式ロータリスイッチまたはポテンショメータを置き換える費用効果の高い方法を提供します。これらはまた、すべてのMagAlpha部品で利用可能な磁場しきい値検出機能を備えており、ロータリノブの設計にプッシュボタンアクションを実装できます。
すべてのMagAlphaセンサは、省スペースの3mm x 3mm QFNパッケージ(2mm x 2mm QFNのMA782を除く)で提供され、3.3V電源で動作します。消費電流は通常10mA〜13mAの範囲であり、新しいMA780およびMA782低電力部品ではマイクロアンペアの平均電流が可能です。
MagAlphaセンサーファミリの詳細についてはhttps://www.monolithicpower.com/jp/products/sensors/position-sensors.htmlをご参照ください。
ファミリに関する次の記事では、デジタルフィルタ操作が出力分解能を決定する方法、およびさまざまなフィルタ帯域幅が角度ラグにどのように影響するかについて説明します。
アカウントにログイン
新しいアカウントを作成