動的速度オブザーバを利用したPMSMのフィールド指向制御
Jia Li、エンジニア、MPS
永久磁石同期モータ (PMSM) は、電気自動車、電気飛行機、ロボット工学、家庭用電化製品などの工業製造で広く使用されています。ベクトル制御は通常、永久磁石同期モータ (PMSM) を駆動して動的応答を向上させ、機械の潜在能力を最大限に活用するために実装されます。
ベクトル制御を実現するには、ロータの速度と位置を決定することが必須です。光学二次センサとホールセンサは、モータの速度と位置を測定するために最も一般的に使用されます。ただし、光学二次センサとホールセンサは高価であり、駆動コストが増加します。
PMSMドライブの有望なソリューションの1つは、低コストの磁気角度センサと動的オブザーバを使用して正確なロータ速度を推定する組み合わせです。本稿で紹介するMPSのモータ制御モジュールには、モータ制御ASIC、磁気角度センサ、三相MOSFET電力段、NEMA23およびNEMA17形式のモータに適合する1つのPCB上のプリドライバが含まれています。
モータ制御ASICは、電気モータドライブなどのアプリケーションに優れた計算能力を提供します。これは、PMSMロータの絶対位置を検出する12ビット分解能の磁気角度センサであるMA702と連動します。MA702は、光学二次センサやホールセンサよりも安価です。プロセス全体を通してロータの位置を知ることにより、PMSMの機械式に基づいて動的状態オブザーバを構築し、モータ速度を検出できます。ASICは、動的オブザーバを使用して位置測定ノイズをフィルタで除去し、ロータ速度を推定して、PMSMにフィールド指向制御 (FOC) を採用します。
フィールド指向のPMSM制御
三相PMSM機械方程式は、方程式セット (1) で表すことができます。
(1)
$$v_{as}=r_s i_{as}+ρλ_{as}$$
$$v_{bs}=r_s i_{bs}+ρλ_{bs}$$
$$v_{cs}=r_s i_{cs}+ρλ_{cs}$$
$$T_e = {P\over 2} λ'_ m [cos (θ_e) i_{as} + cos (θ_e - {2\over 3} π ) i_{bs} + cos (θ_e + {2\over 3} π) i_{cs}] $$
ここで、v、i、およびλは、それぞれ電圧、電流、および磁束です。下付き文字a、b、およびcは、フェーズa、b、およびcの変数を表します。下付き文字sは固定子変数、 ρは特定の値の導関数、PはPMSMの極数です。
電磁トルク$T_e$が三相電流と回転子磁束によって生成されます。$λ'_m$はPMSMのステータ側に感知されたロータの磁束です。角度$θ_e$は磁束と固定子の位相との間の電気角です。
PMSMのFOCを実現するには、エアギャップ磁束と電磁トルクを分離するためにq-dの下で動的モデルが必要です。Clarke-Park変換に続いて、同期して回転するq-dフレームの下の式セット (1) のPMSMモデルは、式セット (2) を使用して計算されます。
(2)
$$v_{qs}=r_s+ω_r λ_{ds}+ρλ_{qs}$$$$v_{ds}=r_s-ω_r λ_{qs}+ρλ_{ds}$$$$λ_{qs}=L_s i_{qs}+L_m i_{qr}$$ $$λ_ds=L_s i_{ds}+L_m i_{dr}$$
下付き文字q-dはq-d軸変数です。$L_s$が自己インダクタンスであり$L_m$が機械の相互インダクタンスです。制御をさらに簡素化するには、q軸にゼロの回転子磁束が存在するときに、回転子磁束をd軸に揃える必要があります。磁束は、方程式セット (3) で計算されます。
(3)
$$λ_{qs}=L_s i_{qs}$$
$$λ_{ds}=L_s i_{ds}+λ'_m$$
電磁トルクは式 (4) で推定されます。
(4)
$$T_e = {3\over 2} {P\over 2} (λ'_m i_{qs} + (L_d - L_q) i_{ds}i_{qs}$$
式セット (1) 、式セット (2) 、式セット (3) 、および式 (4) の変換手順に従って、磁束はd軸電流によって直接制御できます。$i_ds$が一定の場合、トルク$T_e$はQ軸電流を操作することで直接制御できます。$i_ds=0$を保つ場合、電磁トルクは$i_qs$に正比例します。
図1は、上記の導出から得られたPMSMのFOCの概略図を示しています。

図1: PMSMのFOC概略図
外側のループ基準は測定された変数と比較され、エラーをコントローラ (最も一般的なPIコントローラ) に供給して、コマンドトルク電流$IQ_{ref}$を生成します。d軸電流基準 $ID_{ref}$は、磁束要件に従って設定されます。電流レギュレータ / コントローラの出力$VD_{ref}$, $VQ_{ref}$, $VD_{ref}$および$VQ_{ref}$は、空間ベクトルPWM (SVPWM) のために入力されます。SVPWMブロックは、インバータがPMSMを駆動するためのゲート信号を生成します。
動的オブザーバベースで速度センサ無しのドライブ
MA702は、永久磁石$θ_e$の位置を検出します。ロータの速度は$ω_e=ρθ_e$として算出することができます。MA702はデジタルセンサとして、必然的に測定位置にノイズを導入します。相対測位を使用してモータ速度を直接取得すると、制御方式は役に立ちません。システムにデジタルフィルタ / 推定器を追加することは、この問題に対する中立なソリューションです。
システム推定器は、方程式セット (5) を使用して機械的PMSMモデルに基づいて構築できます。
(5)
$$ρω_m=- {B\over J} ω_m- {T_l\over J} + {T_e\over J}$$
$$ρθ_m=ω_m$$
ここで、$T_e$が電磁トルクであり、$T_l$が負荷トルクです。$ω_m$と$θ_m$は機械的ロータ速度および位置であり、電気的ロータ速度および位置$ω_e$と$θ_e$と比較されます。機械速度および位置時間${P\over 2}$は、電気速度と位置に等しいです。PはPMSMの極番号です。パラメータJとBは、それぞれPMSM慣性とロータと負荷の複合粘性摩擦を表します。
The MA702は、ロータの絶対位置をモータ制御ASICに供給し、機械モデルシステム行列Aを2つの非ゼロ要素のみを持つ単純な3 x 3マトリックスにします。より単純なシステムマトリックスは、MCUの計算負荷を軽減し、アルゴリズムの実装を容易にし、実行を高速化します。
オイラー法を使用して、式セット (5) でPMSMの機械モデルを離散化します。状態変数x、∈、および$R^n$は、方程式セット (6) を使用して離散時間で表すことができるシステムプロセスの状態です。
(6)
$$x_k=Ax_{k-1}+Bu_{k-1}+w_{k-1}$$$$y_k=Hx_k+v_k$$$$p(w) \sim N(0,Q)$$$$p(v) \sim N(0,R)$$
ここで、uは入力変数、yは出力測定値です。wとvは、それぞれQとRのノイズ共分散を持つプロセスノイズと測定ノイズです。
古典制御理論に従って、推定量ゲインKの状態推定値は式 (7) で計算できます。
(7)
$$x ̂_{k|k}=x ̂_{k|k-1}+K(y_k-Hx ̂_{k|k-1})$$
表記$a_{n|m}$はステップnでのaの推定を表し、$m\le n$であるステップmの観測値によります。カラット (^) は、変数が推定されることを示します。一定のゲインKを使用する従来の状態オブザーバとは異なり、動的オブザーバは、反復ごとに推定ゲインKを再帰的に更新します。
FOC回路図 (図1を参照) と比較すると、動的速度オブザーバベースのドライブ回路図は、オブザーバを実行するためのシステム入力として機械測定を使用します (図2を参照) 。動的オブザーバーは、フィルタ処理された、または推定されたロータ速度を出力します。ロータ位置は、PMSMのFOCを実行するために使用されます。

図2: 動的オブザーバベースの PMSM FOC
シミュレーション結果
Matlab / Simulinkを使用して、シミュレーションを実行しました。アルゴリズムを検証するために使用するモータは、MPS eMotion SystemTMスマートモータMMP757094-36です。MMP757094-36は、サーボモータ・アプリケーション向けに完全に集積されたスマートモータ・ソリューションファミリの一部です。表1にモータのパラメータを示します。
表1: モータパラメータ
|
固定子相抵抗 |
600mΩ |
|
固定子相インダクタンス |
600μH |
|
モータ慣性 |
210g * cm2 |
|
トルク定数 |
76mN * m/A |
|
ポールペア |
4 |
図3は、推定速度が実際のモータ速度をどのようにトレースするかを示しています。推定速度と実際の速度は両方とも、約0.05秒後に定常状態になります。図4は、速度応答が安定した後、誤差共分散の行列式の絶対値がゼロに低下することを示しています。動的オブザーバゲインは、速度応答によって変化します。過渡期間の後、オブザーバゲインKは一定のゲインになります。

図3: 速度応答
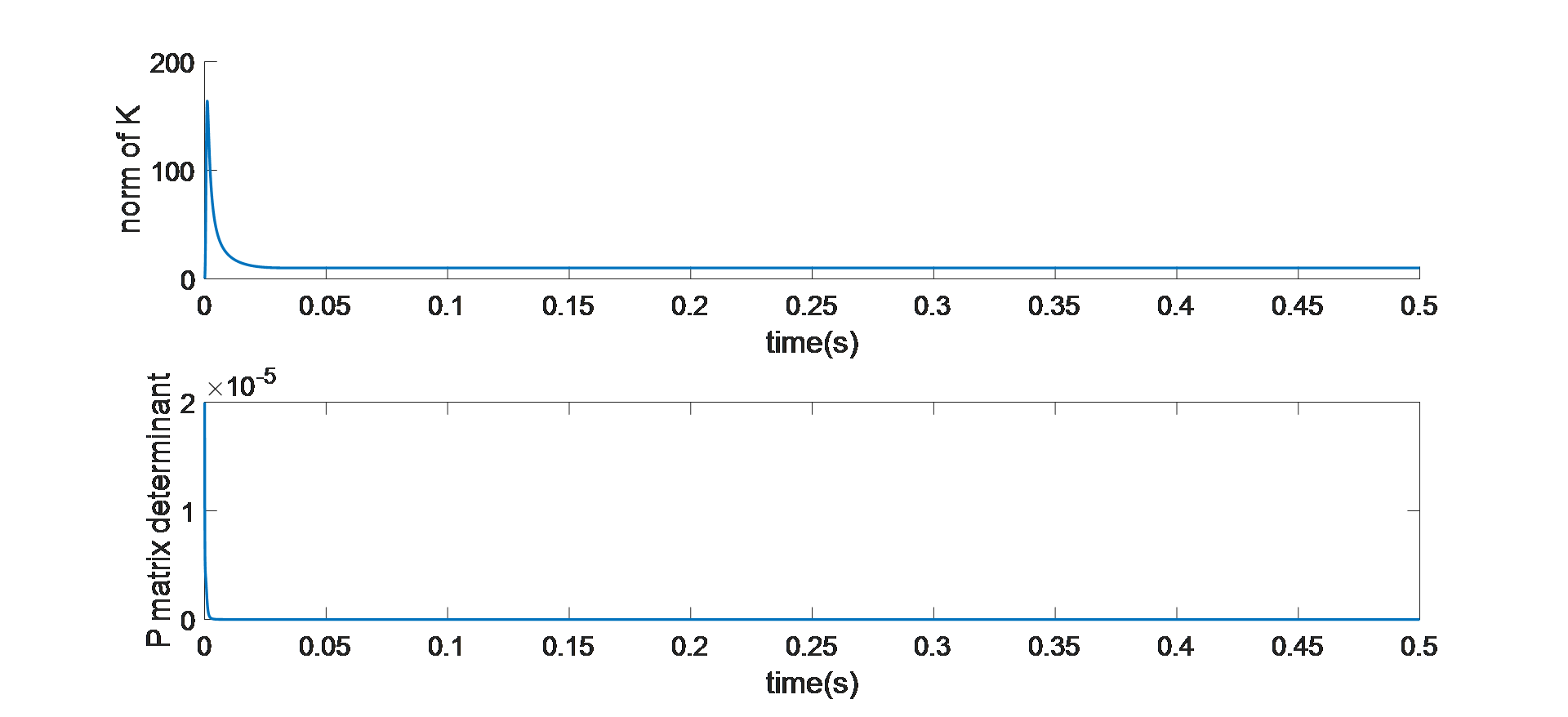
図4: エラー共分散とオブザーバゲインダイナミクス
リアルタイムのハードウェア結果
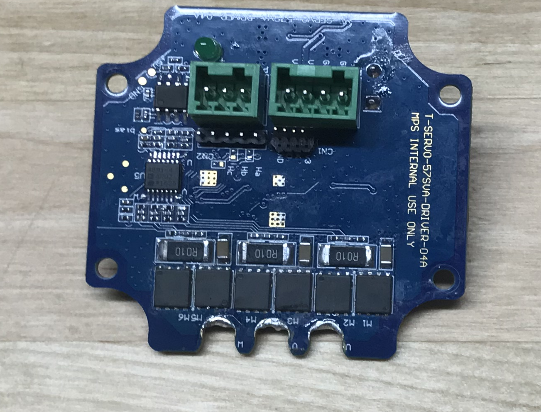
アルゴリズムを検証するために、リアルタイムのハードウェア実験結果も測定されました。NEMA 23 57mmモータ用に設計されたモータ制御モジュールは、モータに直接取り付けることができます。
 |
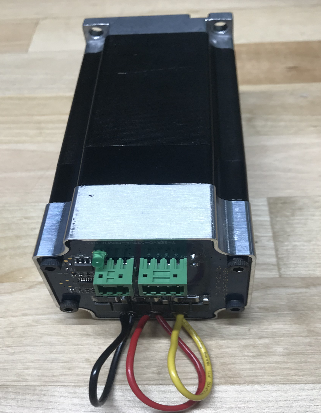 |
図5: MPSのモータ制御モジュール (左) とMPSのスマートモータ (右)
前のセクションで説明したように、MA702角度センサがロータの絶対位置をモータ制御ASICに供給することで、動的オブザーバの再帰的反復の実装が容易になり、計算の負担が軽減されます。測定は1つの変数のみであるため、複雑な行列変換を行う代わりに、オブザーバゲインの計算は単純な除算になります。動的オブザーバの計算全体は、反復ごとに20μs以下だけかかります。
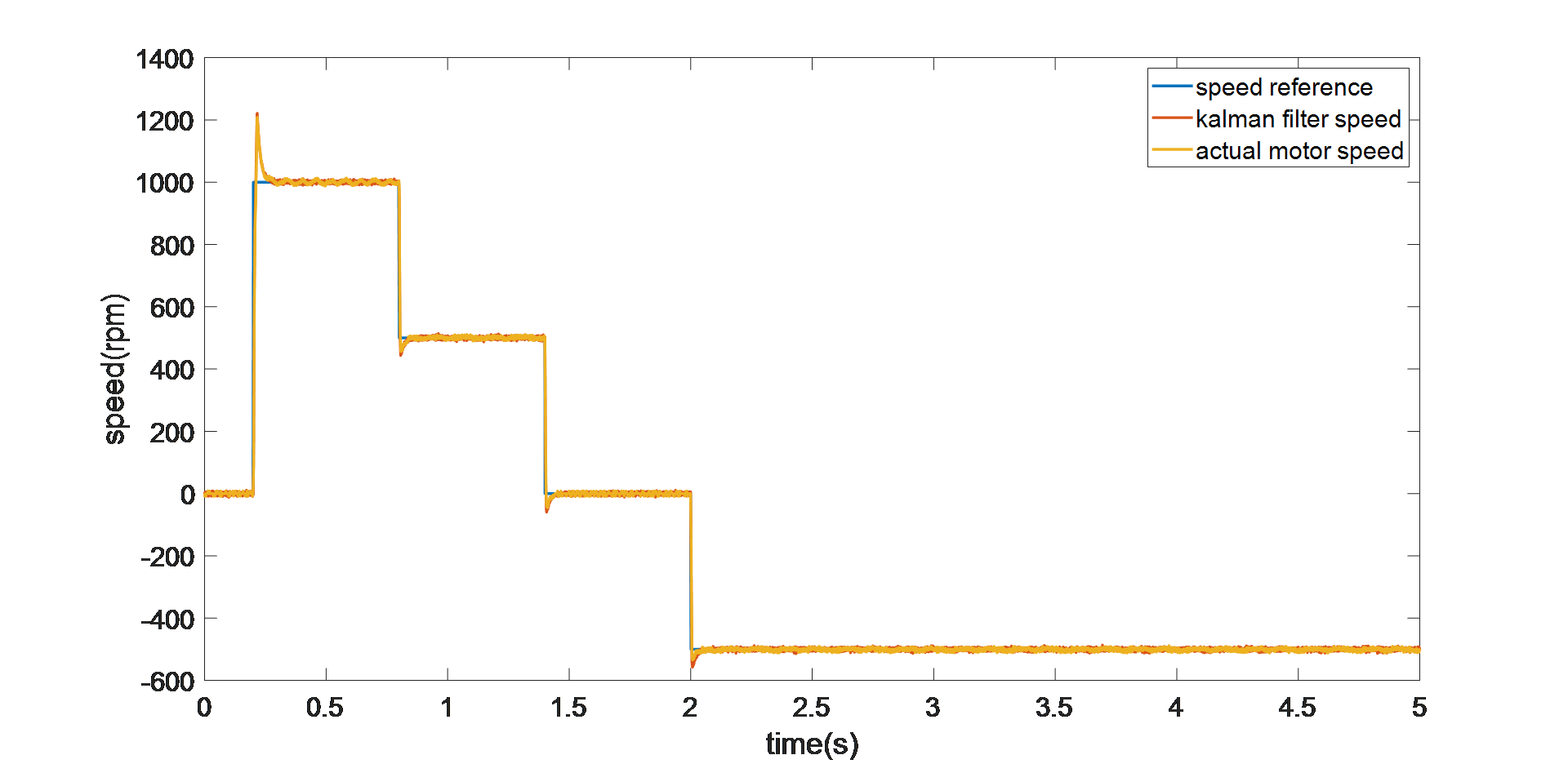
図6: リアルタイムでのステップスピード応答
図6は、1000rpmから-500rpmまでの幅広い速度リファレンスが、ステップを変更してシミュレーションシステムに供給されることを示しています。動的オブザーバの推定速度は、さまざまな速度基準ステップに直面しているモータ速度を追跡できます。アルゴリズムは、停止参照を提供することもできます。
結論
本稿では、PMSM FOCの有望なソリューションを、低コストの磁気角度センサと動的オブザーバを組み合わせて正確なロータ速度を推定する方法として紹介しました。このアルゴリズムは、MPSのモータ制御ASICに実装されています。MA702は、高解像度のオンボード角度センサを提供するため、アルゴリズムは高次元の逆行列計算を回避します。これにより、コード開発と計算に費やす時間が容易になります。シミュレーションとリアルタイム検証の両方の結果は、提案されたソリューションが優れた動的性能を持ち、さまざまな速度基準が与えられた場合にPMSMを制御できることを示しています。
_________________________________
興味のある内容でしたか? お役に立つ情報をメールでお届けします。今すぐ登録を!
アカウントにログイン
新しいアカウントを作成