追加センサによる昇圧PFCコンバータの入力電力推定の実現可能性と精度の分析

はじめに
PFCコンバータは、メインラインからDC出力電圧を供給し、同時に高力率 (PF) と低電流歪みを維持するために、産業界で広く使用されています。通信、サーバー、ワークステーション電源、プラグイン電気自動車など、これらのアプリケーションの一部では、エネルギー消費をモニタし、システム効率を向上してインテリジェント・システム管理を実現するために、有効な入力電力をリアルタイムで測定する必要があります。この電力計測機能を実行するために、ブリッジ整流器の前に、専用の電圧および電流センサが通常取り付けられています。ただし、これらのセンサすべてにより、追加センサがシャントベースであるかホール効果ベースであるかにかかわらず、こういった電源でかなりのコスト、複雑さ、および電力消費が増加することになります。
昇圧PFCコンバータの基本的なモデリングによると [1]、PFCコントローラは通常、入力電圧、出力電圧、およびインダクタ電流をサンプリングして、スイッチング周波数とデューティサイクルを制御します。このようにして、出力電力が調整され、入力電流が同時に整形されて、高いPFと全高調波歪み (THD) が実現されます。したがって、PFCコントローラには通常、電力推定に使用できる加工されていない情報があります。デジタルコントローラが業界で広く採用されていることを考えると [2, 3, 4]、この情報は通常、PFCコントローラからのデジタル通信インタフェースを通じてリアルタイムでアクセス可能です。これにより、追加の電圧および電流センサによって実施される従来の電力計測の代わりに、間接計算を介して入力電力をモニタするアプローチが可能になります。
許容可能な精度で実際の入力電力を推定するには、いくつかの重要な要素を考慮する必要があります。まず、電磁両立性 (EMC) 部品やブリッジ整流器など、入力の受動素子によって、昇圧コンバータで調整される電力と実際の入力電流で違いが生まれます。ただし、受動素子によってもたらされる追加電力はモデル化が簡単であるため、これは主要な問題ではありません [5]。言い換えると、設計された回路パラメータに基づいて直接計算可能だということです。特に高周波歪みが基本的な電力計測要件の主な関心事ではないことを考えるとそうなります。ただし、一部の非理想的な影響が、インダクタ電流推定の精度にさらに複雑な影響をもたらします。ターンオンとターンオフの遅延は、実際のインダクタ電流とスイッチング周波数を制御目標から逸脱させます。DCMの寄生振動により、インダクタ電流に別の変数が加わります。さらに、これらの影響はすべて動作条件によって変化します。ほとんどの実用的なアプリケーションは、マルチモード制御方式を採用しています [6, 7, 8, 9]。これは、従来の臨界モード (CrM) 制御方式または固定周波数の連続導通モード (CCM) 制御方式よりも優れた軽負荷性能をもつためです。電力を正確に推定するには、さまざまな動作条件下でこれらの非理想的な影響を考慮する必要があります。PFCモデルの可観測性に基づき [10]、インダクタ電流を検出しなくても、PFC制御方式を実装できます [11, 12]。したがって、遅延によって発生する電流の誤差は、入力電圧と出力電圧、およびPFCインダクタなど、他のシステム状態とパラメータの適切なモデリングに基づいて補正することもできます。一方、DCMの寄生振動は、時間領域でモデル化でき [13, 14]、これに基づいて、各スイッチングに対応する誤差も推定できます。
本稿では、これらによる影響をマルチモードPFC制御方式に基づいて詳細に分析し、広い動作範囲にわたって、正確な有効電力の推定を実現するために、入力電力推定のために実行しやすい、改善されたアルゴリズムを提案します。400Wの定格電力をもつプロトタイプを、HR1211GY、デジタルPFCおよびLLCを組み合わせたコントローラベースで構築しました。コントローラは、CCMとDCMの動作をスムーズに切り替えるマルチモードPFC制御方式を実装しています。このような産業界で主流の制御方式に基づく実験結果により、提案された推定アプローチの実行可能性と普遍的な適用性を検証しました。
関連コンテンツ
-
寄稿文

デジタルPFC + LLCコンボコントローラが、高速充電アダプタの新時代を加速
急速充電テクノロジーは絶えず進化しており、市場では高出力アダプタや複数のUSBPDポートを備えた新しいアダプタモデルの需要が高まっています。
-
ビデオ

PFC + LLC電源ソリューション
5Gネットワークの開発は、基地局の電力供給に新しく刺激的な課題をもたらします。
-
リファレンスデザイン
オフライン600Wバッテリ : HR1211付きPFC + LLC
EVHR1211-Y-00Bは、リチウムイオンチャージャの評価ボードです。リチウムイオンチャージャは、通常、e-モビリティおよび無停電電源装置のアプリケーションで使用されます。
-
ウェビナー

3kW AC/DC PFCトーテムポールソリューションに向けたMPSの高電力ソリューション
トーテムポールPFC設計用のドライバやデジタルコントローラを含むMPSの高電力ソリューションをどのようにAC電源に適用するかご覧いただけます。
マルチモードPFC制御方式
図1に示すように、制御方式は出力電圧VOをサンプリングし、そしてそれを出力基準VO_REFと比較し、PIループレギュレータを介して内部補償状態vCOMP(n)を導き出します。したがって、内部電流ループは、次のようなインダクタ電流の制御基準を作りだします。
ここでvIN(n)はサンプリングされた瞬時入力電圧であり、VIN_PKはラインサイクルのピーク電圧です。
2iREF(n)を、各スイッチングサイクル中にMOSFETがオフになる直前にサンプリングできる、インダクタのピーク電流iPK(n)と比較することで、制御方式がコンバータをCCMまたはDCMのどちらで動作させるかを決定できます。CCMで動作する場合、スイッチング周波数fSは、定常状態として最大スイッチング周波数fS_MAXに調整されます。そして、すべてのスイッチングサイクルの平均電流をiREF(n)に等しく保つために 、インダクタ電流iLが、次のような目標のバレー電流、iVallyまで減少すると、MOSFETは常にオンになります。
同時に、PFCインダクタの磁化バランスを保証するために、オン時間TON(n)は次のように制御されます。
DCMで動作する場合、オン時間は依然として同じ方法で制御されますが、 iREF(n)に等しい平均電流を維持するためにスイッチング周波数が下げられます。一般的に、スイッチング周波数は次のように制御されます。
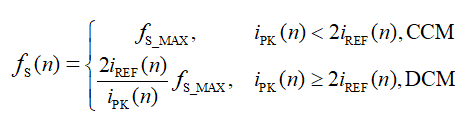
このように、1つのスイッチングサイクルの平均iLは常にiREFに等しくなります。理想的には、iREFを使用して、入力電力を計算できます。ただし、次のセクションで示すように、非理想的な影響を補正しないと、推定精度を保証できません。
寄生効果による電流制御誤差
昇圧コンバータの実際の電流と制御ターゲットの間の誤差をもたらす主な寄生効果は、スイッチング遅延と電流振動です。寄生効果はコンバータのパラメータに関係し、動作条件によって変化します。
CCMでは、図2に示すように、ターンオン遅延TD_ONとターンオフ遅延TD_OFFを介して誤差が発生します。ターンオン遅延により、目標バレー電流を下回るアンダーシュートが発生しますが、ターンオフ遅延により、サンプリングポイントがインダクタ電流の実際のピークポイントから外れます。1つのスイッチングサイクルの平均誤差は次のようにして計算できます。
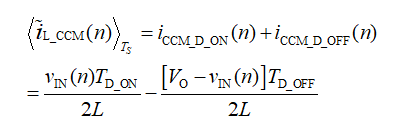
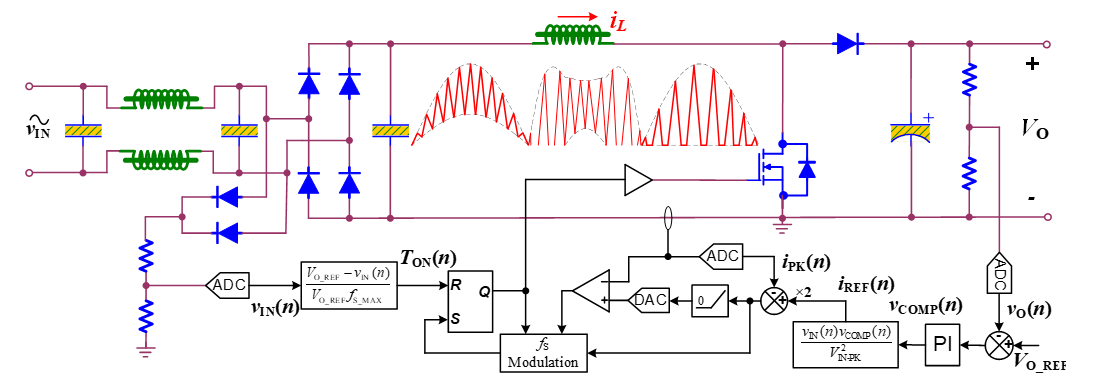
図1 : マルチモードPFC制御方式の昇圧コンバータ
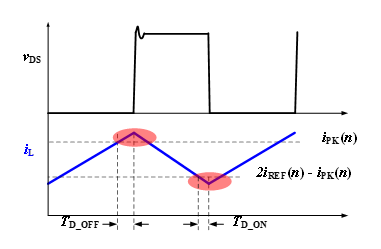
図2 : CCMでの電流誤差の主な原因
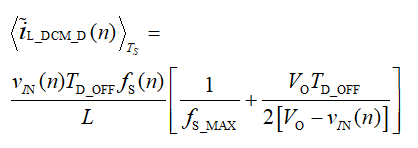
ここで、Lは PFCインダクタのインダクタンスです。
DCMでは、図3に示すように、インダクタ電流は常にゼロから始まるため、ターンオン遅延はインダクタ電流に影響を与えません。ただし、ターンオフ遅延は、依然としてインダクタ電流のピークサンプリングに同様の影響を及ぼします。誤差モデルは、電流のピークとデューティの両方に影響を与えるため、CCMのモデルとは異なります。DCMのターンオフ遅延によって引き起こされる1つのスイッチングサイクルの平均誤差は、次の式で取得できます。
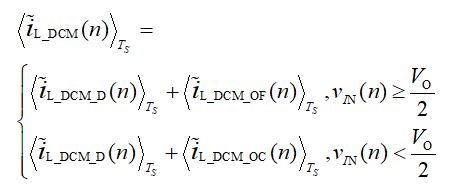
さらに、DCM振動も、電流誤差のもう1つの主な原因です。PFCインダクタ電流がゼロに低下すると、インダクタはMOSFETとフリーホイールダイオードの等価寄生容量によって振動します。振動の初期状態は、インダクタ電流がゼロで、ドレイン-ソース電圧vDSがVOです。MOSFETのボディダイオードのクランプ効果により、vDSがゼロまで振動するかに応じて、振動には2つの場合が考えられます。
vINがVO / 2を超えると、図3 (a) に示すように、振動はどの点でも固定されずに、自由減衰で進行します。したがって、1つのスイッチングサイクルでの平均振動電流は次のようになります。
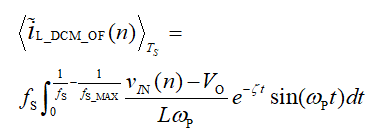
ここで、ωPとζは振動の角周波数と減衰係数です。
vINがVO / 2を下回る場合、図3 (b) に示すように、vDSがゼロまで低下すると、振動はボディダイオードによってクランプされます。クランプ期間中、インダクタ電流は、電流の極性が再び反転するまで、一定のスルーレートで増加します。その後、自由振動が再開します。したがって、この場合の振動は3つのセクションで構成され、最初の2つの持続時間はそれぞれ次のようにして計算できます。
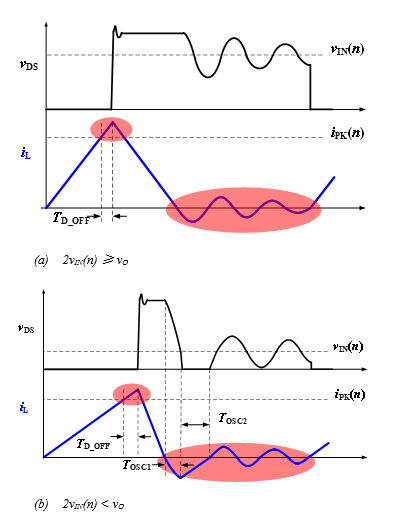
図3 : DCMの電流誤差の主な原因
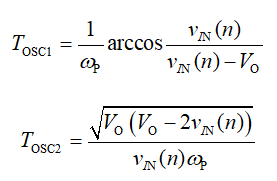
これに基づき、1回のスイッチングサイクルでの平均振動電流は次のように求められます。
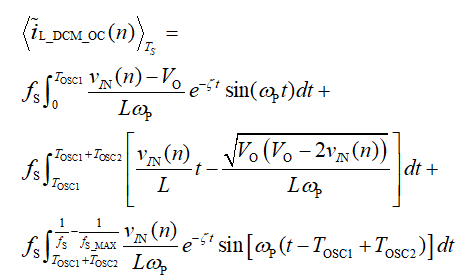
これに基づく、DCMの一般的な電流誤差は次のとおりです。
各動作条件での寄生効果による電流誤差は、(5)〜(11) で公式化されます。ただし、実用的なアプリケーションで使用するための普遍的な電流誤差補償アルゴリズムを作るには、各条件間の境界も実行する必要があります。AC入力ラインサイクルの第1四半期におけるCCMとDCM間の遷移角度をθTと仮定し、境界導通時の入力電圧と基準電流は以下です。
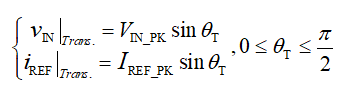
ここでIREF_PKは完全なラインサイクルのピーク基準電流であり、(1) に基づくvCOMPから導き出せます。AC入力ラインサイクルの各1/4の遷移角度は、互いに対称です。
インダクタ電流も遷移点で境界伝導状態であるため、次の式になります。
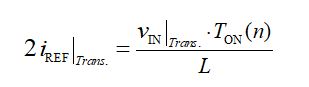
(2)、(12)、および (13) に基づいて、次のように推定できます。
したがって、θTの分布は 図4にプロットされています。θTが0に等しい場合、コンバータはCCMでのみ動作します。θTがπ / 2に等しい場合、コンバータはDCMでのみ動作します。θTが0とπ / 2の間にある場合、コンバータは1つのAC入力ラインサイクル中にCCMとDCMの両方で動作し、負荷が増加したり入力電圧が減少したりすると、CCMの時間が長くなります。
図4 : CCMとDCMの分布 vs. 入力と負荷条件
有効入力電力の推定
セクションIIIの分析で示されているように、さまざまな動作条件での寄生効果を補正することにより、有効入力電流を正確に推定できます。有効入力電力を導き出すには、入力の受動素子によって発生する電力損失にも対処する必要があります。
図1に示す回路図を代表的な例として、PFCコンバータの入力の受動素子には、主にLCフィルタとブリッジダイオードが含まれます。フィルタコンデンサを流れる無効電流は有効電力に寄与せず、コンデンサのリーク電流は十分に小さいことを考慮すると、フィルタコンデンサは有効電力の推定にほとんど影響を与えません。一方、ブリッジダイオードによって生じる電圧降下とフィルタインダクタの寄生抵抗は、かなりの電力損失をもたらし、電力推定に含める必要があります。受動素子の前の入力電圧は、次のように導き出せます。

ここでVF_BDは、1つのブリッジ整流ダイオードの順方向電圧で、RLは、すべてのフィルタインダクタの総等価抵抗です。vIN(t) = VIN_PKsinωLt は、PFC 制御方式でサンプリングした入力電圧vIN(n)に基づいて再構築された電圧で、ωLは入力ライン周波数です。
上記のすべての分析を組み合わせると、有効入力電力は次のように推定できます。
実験的な検証
入力電力の分析と提案された推定を検証するために、400Wのプロトタイプを構築してテストしました。プロトタイプは、デジタルマルチモードPFCおよびLLCコンボコントローラであるHR1211GYをベースに設計し、実装しています。PFCステージの回路と制御方式は図1と同じで、図5にプロトタイプの写真を示します。PFCステージの仕様と主要部品のパラメータは次の通りです。VIN_RMS = 90V - 265V、fL = 50Hz、RL = 100mΩ、VF_BD = 0.75V、VO = 400V、fS_MAX = 100kHz、L = 190µH、IPP60R099C7XKSA1はプライマリMOSFET、STPSC406Dはフリーホイールダイオードで、ωP = 5.93×106rad/s、TD_ON = 300ns、TD_OFF = 150nsです。そして、電力推定に必要な他の瞬間状態、vCOMP、VIN_PKとVOには、HR1211GYの内蔵UARTインタフェースからリアルタイムでアクセス可能です。
入力電流とPFCインダクタ電流の波形を以下に示します。図6は、PFCコンバータが低ラインおよび全負荷状態下で、CCMで完全に動作することを示しています。スイッチング周波数はfS_MAXでクランプされ、およびピーク電流とバレー電流の両方が正弦波で調整されます。
図5 : 実験用のHR1211GYに基づく400Wプロトタイプ
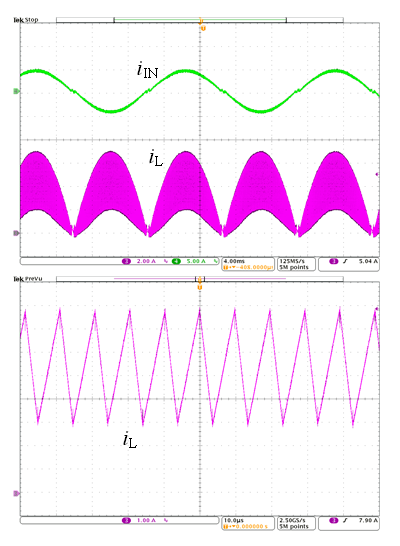
図6 : VIN_rms = 110VおよびPO=400Wでの実験波形
図7に示すように、高ラインおよび全負荷状態では、PFCコンバータはCCMとDCMの混合で動作します。波形は、インダクタ電流のCCMとDCM間の遷移を示しています。このように、ピークインダクタ電流は入力ラインのピークで低くなりますが、インダクタ電流のスイッチングサイクル平均は、コントローラによって正弦波になるように調整されたままです。
軽負荷状態では、図8に示すように、PFCコンバータはDCMで完全に動作します。負荷が減少するにつれて、スイッチング周波数は低くなります。
提案された電力推定アプローチでは、10%から100%の負荷までの入力電力が、上記のこのプロトタイプのパラメータとデジタルコントローラHR1211GYから読み取られた瞬間の状態に基づいて計算されます。図9に、WT310Eパワーメータを使用した実際の測定データと比較した計算結果を示します。
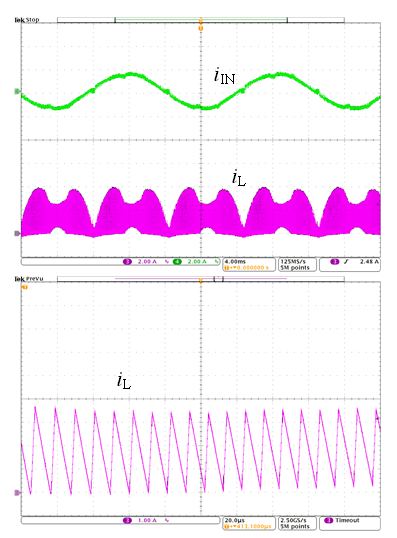
図7 : VIN_rms = 230VおよびPO=400Wでの実験波形
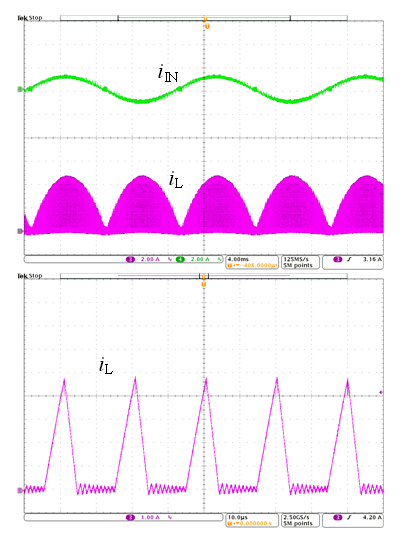
図8 : VIN_rms = 110VおよびPO=100Wでの実験波形
広い負荷範囲で推定誤差が3%未満であることがわかります。さらに、異なる入力条件が同じ推定アルゴリズムでカバーされています。
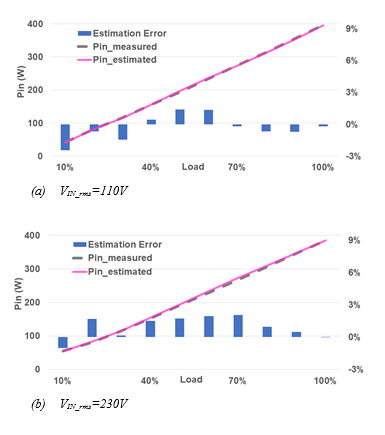
図9 : 計算された入力電力と測定された入力電力の対比
結論
本稿では、昇圧PFCコンバータ用の追加センサなしで有効入力電力推定の実行可能性を検討しました。このホワイトペーパの分析では、ターンオンとターンオフの遅延、DCM振動、DCMとCCMの間の遷移、受動素子の有効電力損失などの寄生効果の影響を説明しています。システムの数学的モデリングと寄生効果に基づいて、入力電力を正確に推定するためのアルゴリズムを提案しました。これは主流のマルチモードPFC制御方式の特性を考慮し、幅広い動作範囲に対応できます。提案された推定アプローチは、HR1211GYベースの400WブーストPFCプロトタイプの実験結果によって検証されています。デジタルPFCコントローラが実際のアプリケーションでますます普及するにつれて、本研究は、センサを追加することなく、基本的な電力計測機能を実装することにより、システムの複雑さとコストを削減し、将来的に電源製品の信頼性を向上させることが可能なアプローチを提供します。
参考文献
- D. Simonetti, J. Vieira, and G. Sousa, “Modeling of the high-power factor discontinuous boost rectifiers,” in IEEE Trans. Ind. Electron., vol.46, no. 4, pp. 788–795, Aug. 1999.
- K. De Gusseme, D. M. V. de Sype, A. P. Van den Bossche and J. A. Melkebeek, "Sample correction for digitally controlled boost PFC converters operating in both CCM and DCM," in Proc. IEEE Appl. Power Electron. Conf., 2003, pp. 389-395 vol.1.
- [K. De Gusseme, D. M. V. de Sype, A. P. M. Van den Bossche and J. A. Melkebeek, "Digitally controlled boost power-factor-correction converters operating in both continuous and discontinuous conduction mode," in IEEE Trans. Ind. Electron., vol. 52, no. 1, pp. 88-97, Feb. 2005.
- S. F. Lim and A. M. Khambadkone, "A Simple Digital DCM Control Scheme for Boost PFC Operating in Both CCM and DCM," in IEEE Trans. Ind. Appl. vol. 47, no. 4, pp. 1802-1812, July-Aug. 2011.
- Y. Levron, H. Kim and R. W. Erickson, "Design of EMI Filters Having Low Harmonic Distortion in High-Power-Factor Converters," in IEEE Trans on Power Electron. vol. 29, no. 7, pp. 3403-3413, July 2014.
- A. A. de Melo Bento and E. R. Cabral da Silva, "Hybrid One-Cycle Controller for Boost PFC Rectifier," in IEEE Trans. on Ind. Appl., vol. 45, no. 1, pp. 268-277, Jan.-Feb. 2009.
- H. Kim, J. Kim, K. Park, H. Seong, G. Moon and M. Youn, "On/Off Control of Boost PFC Converters to Improve Light-Load Efficiency in Paralleled Power Supply Units for Servers," in IEEE Trans. Ind. Electron. vol. 61, no. 3, pp. 1235-1242, March 2014.
- Y. Chen, Y. Chen and H. Chen, "On-time compensation method for CRM/DCM Boost PFC converter," in Proc. IEEE Appl. Power Electron. Conf., 2013, pp. 3096-3100.
- Y. Chen and Y. Chen, "Line Current Distortion Compensation for DCM/CRM Boost PFC Converters," in IEEE Trans. Power Electron. vol. 31, no. 3, pp. 2026-2038, March 2016.
- M. Pahlevani, S. Pan, S. Eren, A. Bakhshai and P. Jain, "An Adaptive Nonlinear Current Observer for Boost PFC AC/DC Converters," IEEE Tran on Ind. Electron., vol. 61, no. 12, pp. 6720-6729, Dec. 2014.
- V. M. Lopez-Martin, F. J. Azcondo and A. de Castro, "Current error compensation for current-sensorless power factor corrector stage in continuous conduction mode," IEEE 13th Workshop, COMPEL, 2012, pp. 1-8.
- V. M. Lopez, F. J. Azcondo, A. de Castro and R. Zane, "Universal Digital Controller for Boost CCM Power Factor Correction Stages Based on Current Rebuilding Concept," IEEE Trans. Power Electron., vol. 29, no. 7, pp. 3818-3829, Jul. 2014.
- Q. Li, K. Yao, J. Song, H. Xu, and Y. Han, “A series diode method of suppressing parasitic oscillation for boost PFC converter operated in discontinuous conduction mode,” IEEE Trans. Power Electron., vol. 33, no. 1, pp. 407–424, Jan. 2018.
- K. Yao, H, Xu, Q. Li, Y. Han, and K. Yun, “Detailed oscillation analysis and parameter selection principle for boost PFC converter with RC snubber operated in DCM,” IEEE Trans. Power Electron., vol. 34, no. 4, pp. 3348–3369, Apr. 2019.
_______________________
興味のある内容でしたか? お役に立つ情報をメールでお届けします。今すぐ登録を!
アカウントにログイン
新しいアカウントを作成