バイポーラ・ステッピング・モータ (パートI) : 制御モード

はじめに
インテリジェントな時代では、独自の開ループ位置制御性能により、ステッピング・モータが広く使用されています。各デバイスには、ステッピング・モータの回転中に滑らかな出力トルクを確保するための特定の要件があります。回転の安定性は、モータの物理的な構造とその制御モードに密接に関係しています。
本稿では、バイポーラ・ステッピング・モータを紹介し、その構造と制御モードについて説明します。
バイポーラ・ステッピング・モータの基本部品
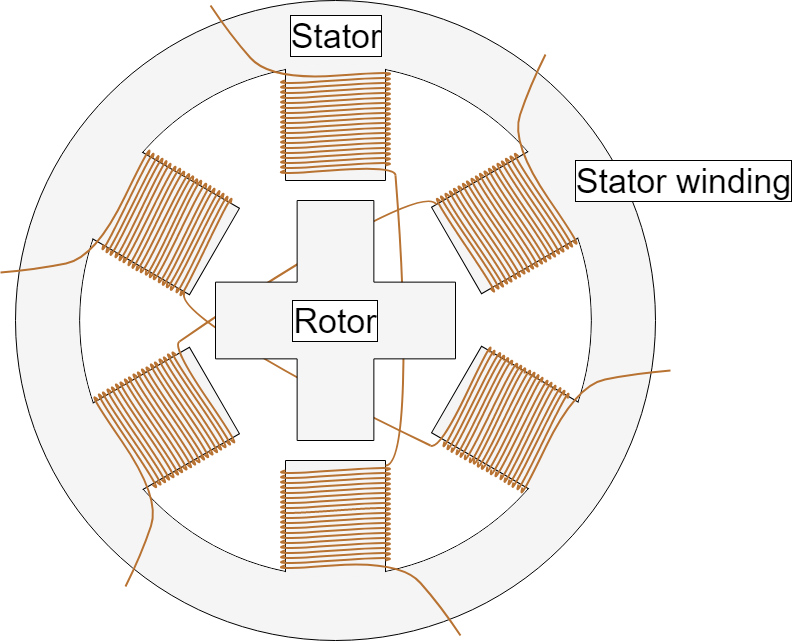
ステッピング・モータは、回転を均等なステップに分割するブラシレスDC (BLDC) モータです。バイポーラ・ステッピング・モータは、1相あたり1つの巻線を持つステッピング・モータの一種です。バイポーラ・ステッピング・モータは、2相4線式ステッピング・モータです。これらは、固定子とロータの2つの主要部品で構成されています (図1参照)。

図1 : バイポーラ・ステッピング・モータの構造
固定子
固定子は、モータの固定された部分です。巻線は8つの固定子に巻かれ、各固定子コアには5つの歯があります (図1参照)。
A相の巻線は固定子1から始まり、次に固定子3、固定子5、および固定子7に巻き付けられます (図2参照)。なお、固定子1と固定子5の巻き方向は同じで、固定子3と固定子7の巻き方向は同じです。これらの2つのグループ (固定子1と固定子5、そして固定子3と固定子7) は反対方向に巻かれます。B相の巻線は同じ原理に基づいており、固定子4と固定子8がグループで構成され、固定子2と固定子6がグループで構成されています。
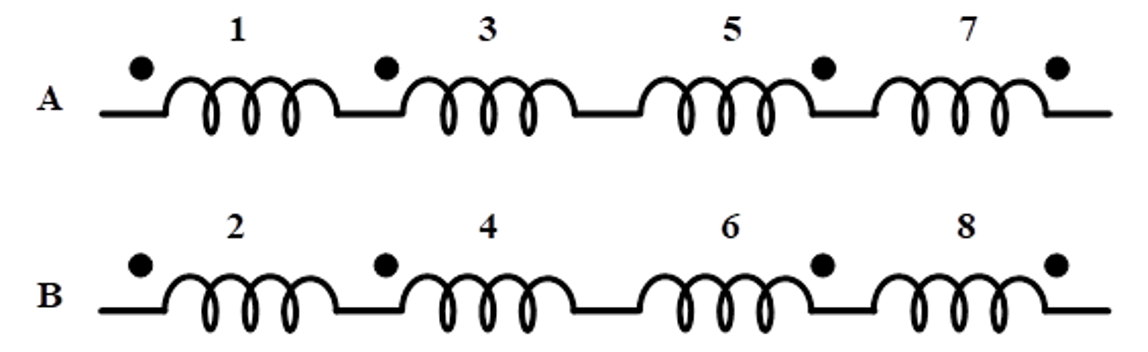
図2 : バイポーラ・ステッピング・モータの巻線回路図
ロータ
ロータには通常、軸方向に磁化された永久磁石が取り付けられています。図3は、全体的なロータの構造を示しています。

図3 : ロータの構造
図4にロータ側の断面図を示します。

図4 : 垂直断面図
永久磁石の磁力線は、モータ本体を安定させます。ステッピング・モータは、磁力線と磁気抵抗効果により、通電していないときでも一定の固定するトルクを持っています (図4参照)。
ロータは、固定子ギアの反対側に50の歯があり、歯の数と位相構造により1.8度のステップ角があります (図5参照)。ステッピング角度は、電気的サイクルが90度完了したときに、ステッピング・モータのロータが前進する機械的角度として定義されます。
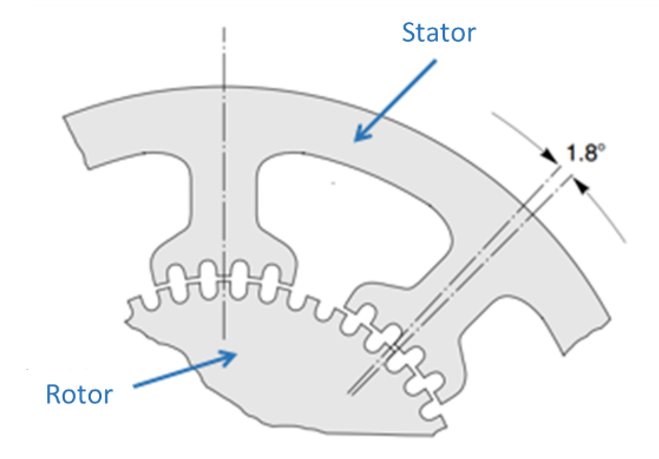
図5 : 1.8°のステップ角度
関連コンテンツ
ステッピング・モード
バイポーラ・ステッピング・モータの構造は、その後の制御方法のよりよい理解を簡単にします (図6参照)。
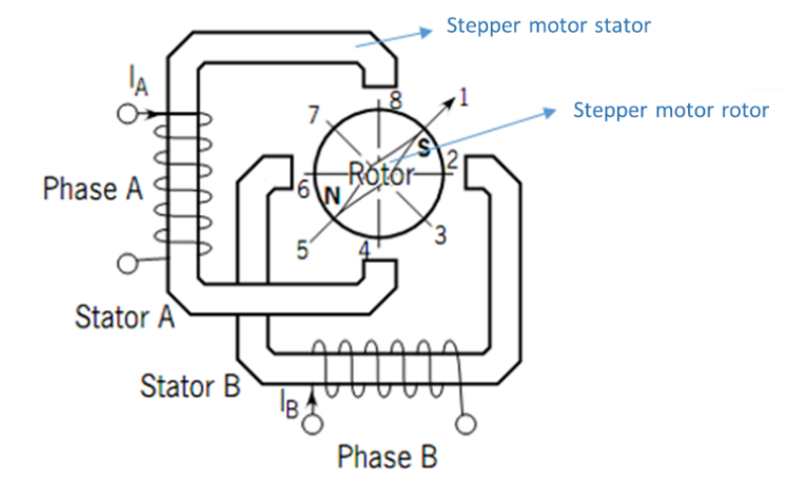
図6 : バイポーラ・ステッピング・モータの簡略回路図
固定子とロータには歯が1つしかないと見なすことができ、ステッピング・モータは他のモータとは異なる方法で駆動されます。これはデュアル・フルブリッジ・ドライブと呼ばれ、A相の巻線が最初のフルブリッジ・ドライブに接続され、B相の巻線が2番目のフルブリッジ・ドライブに接続されます (図7参照)。

図7 : デュアル・フルブリッジ・ドライバの回路図
バイポーラ・ステッピング・モータには、単相ステップ、フルステップ、ハーフステップの3つの制御モードがあります (表1参照)。
表1 : ステッピング・モータ制御モード
| ステッピング・モード | シーケンス | 電気的ステッピング位置 |
| 単相ステップ | $$A > B > \overline{A} > \overline{B}$$ | $$8 > 2 > 4 > 6$$ |
| フルステップ | $$AB > \overline{A} B > \overline{AB} > A \overline{B}$$ | $$1 > 3 > 5 > 7$$ |
| ハーフステップ | $$AB > B > \overline{A} B > \overline{A} > \overline{AB} > \overline{B} > A \overline{B} > A$$ | $$1 > 2 > 3 > 4 > 5 > 6 > 7 > 8$$ |
単相ステップ
単相ステッピング・モードに従いA相、B相を順次駆動すると、固定子磁界が変化し、極性引力によりロータが回転します。A相とB相 (AB) の通電シーケンスとロータの回転位置については、表1をご参照ください。
単相ステッピング・プロセスは、以下に説明する3つの手順で行われます。
- A相が駆動されると、駆動電流はQ1からQ4に流れます。この間、固定子Aの上端はNで、固定子Aの下端はSであり、回転子は位置8に回転します (図6参照)。
- 次に、B相が駆動されると、駆動電流はQ5からQ8に流れます。固定子Bの一端はS、固定子Bの他の端はNで、回転子は位置2に回転します (図6を参照)。
- 次の2つの状態では、起動シーケンスを繰り返した後、ロータが回転を開始します。
図8に、単相ステッピング中のAB相の電流波形を示します。
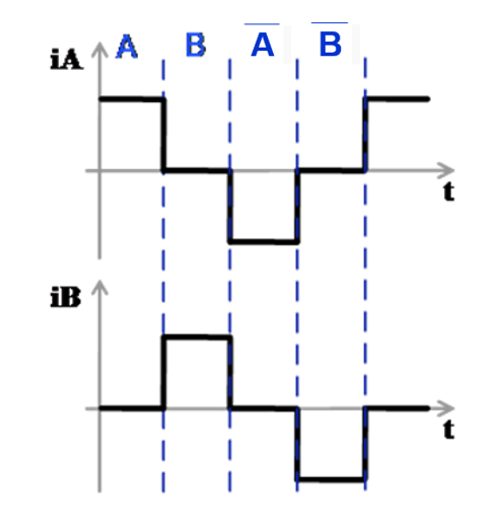
図8 : AB相の単相ステッピング電流波形
フルステップ・ステッピング
単相ステッピングとは異なり、フルステップモードでは A相とB相の両方の巻線が同時に駆動されます。また、対応する4つの通電モードとロータの電気的位置もあり、位置空間は電気的空間で単相ステッピングとは異なります。ロータは、デバイスの起動シーケンスに基づいて回転できます。図9に、AB相のフルステップの電流波形を示します。
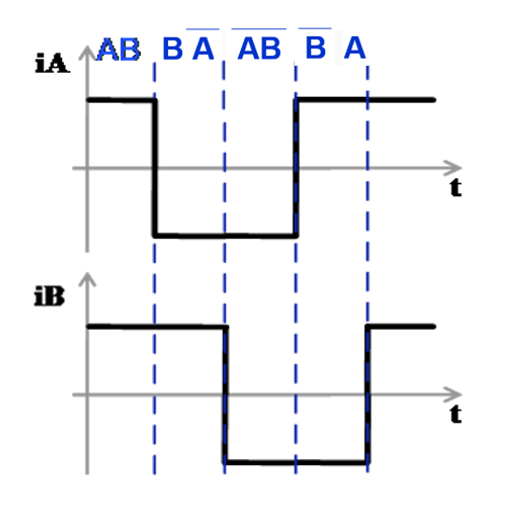
図9 : フルステップ (AB相の電流波形)
ハーフステップ・ステッピング
ハーフステップモードでは、単相ステップとフルステップのステッピングの両方が連動作し、より多くの電気角位置、詳細な電流波形、および、より滑らかな回転を提供します。
図10は、1相から2相への動作の非循環、ハーフステップモードを示しています。このモードは、フルステップとハーフステップを交互に切り替えて、8ステップのシーケンスを生成します。
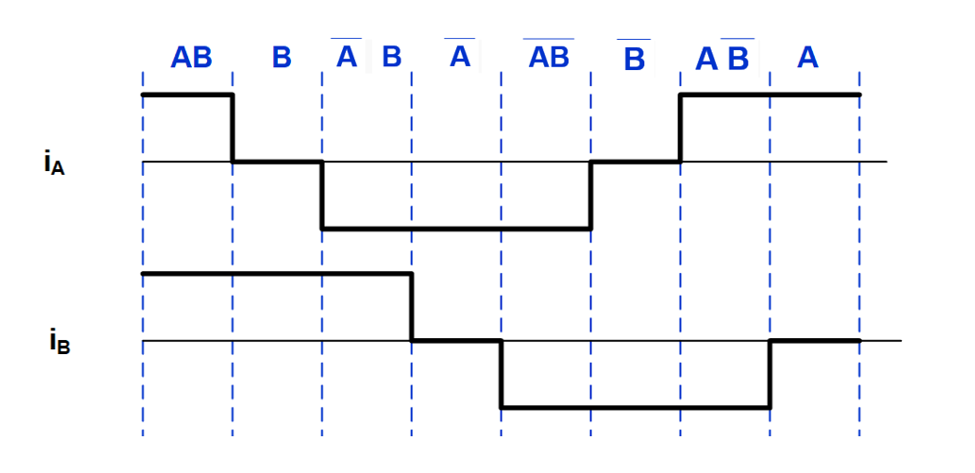
図10 : 非循環ハーフステップモード
結論
本稿では、バイポーラ・ステッピング・モータ (固定子とロータ) の基本部品、単相、フルステップ、ハーフステップの3つの主要な制御モードについて説明しました。パートIIでは、デュアル・フルブリッジ・ドライブのマイクロ・ステッピングについて説明します。
MPSはアプリケーションのニーズを満たすために、ステッピングモータードライバにさまざまな機能を提供します。
_______________________
興味のある内容でしたか? お役に立つ情報をメールでお届けします。今すぐ登録を!
アカウントにログイン
新しいアカウントを作成