


車載バスシステム入門
最新の車載ネットワークの中核をなす車載バスシステムは、車両内のさまざまな電子部品間の複雑な通信ネットワークを調整する上で中心的な役割を果たしています。車載バスシステムでは、その重要性と標準化の推進を理解することで、最新車両の複雑さと機能を理解するための基礎が確立されます。
車載ネットワークにおけるバスシステムの役割
車載ネットワークで、バスシステムは車両の神経系の脊髄と考えられており、さまざまなサブシステムや機器間の正常な通信を保証します。
通信の促進: 多数の電子制御ユニット (ECU)、アクチュエータ、センサ、その他の部品間のデータ伝送は、バスシステムによって提供されます。エアバッグ展開、エンジン管理、インフォテインメント制御まで、バスシステムは機器が互いに「通信」できる環境を構築します。
高い費用対効果: バスシステムは、さまざまなデバイスが1つまたは少数の物理パスを介して通信できるようにすることで、広範な配線ハーネスの必要性を軽減し、最終的には重量とコストの両方を削減します。
リアルタイムデータ交換: 車載アプリケーションでは、アンチロックブレーキシステムなどの即時応答が頻繁に必要になります。タイムリーなアクションを確実に実行するために、バスシステムはリアルタイムのデータ交換を処理します。
故障診断と管理: バスシステムにより、診断装置はさまざまな車両サブシステムにアクセスし、トラブルシューティングと修理の手順を効率化します。
拡張性と柔軟性: 最新のバスシステムは柔軟性が高く、車両全体の電子アーキテクチャを再設計することなく、高度なテクノロジーを組み込んだり、現在の機能をアップグレードしたりできます。
車載バスシステムの標準化
車両内の電子システムの普及に伴い、さまざまなメーカーやサプライヤー間での相互運用性、効率性、互換性を保証するために標準化が重要な要件になりました。
統一された通信プロトコル: 標準化により、製造元に関係なく、さまざまな要素が通信に関して統一されたルールに従うことが保証されます。統合を簡素化し、自動車ネットワークの設計、開発、保守を容易にします。
相互運用性: 標準に従うことで、さまざまなメーカーの要素がシームレスに通信できます。たとえば、標準化されたCANプロトコルにより、互換性の問題なしに複数のサプライヤー間の通信が可能になります。
イノベーションの促進: 標準化によりオープン標準が確立されることが多く、これにより新規参加者にとって公平な環境が整えられ、市場参入の障害が軽減され、イノベーションが促進されます。
規制遵守: 車載バスシステムでは、標準化は有利であるだけでなく、多くの管轄区域で必須となっています。安全性、環境、その他の規制のニーズを満たすためには、標準を遵守することが重要です。
世界貿易の促進: 車両に必要な変更を加えなくても、世界標準によりメーカーは車両を販売できます。国境を越えた貿易を促進するために、製品を国際基準に合わせます。
車載バスシステムの導入により、車両の設計、製造、機能は革命的に変化しました。最新車両の調整と効率におけるそれらの役割は代わりがきかないものであり、車載アプリケーションへの電子機器の統合が進むにつれて、その重要性は拡大し続けています。また、車載バスシステムでは、標準化がイノベーション、コンプライアンス、相互運用性、および世界貿易を向上させるための重要な手段として浮上しています。バスシステムは、最新の自動車技術のあらゆる詳細な調査の基礎となる、通信に関する複雑な知識を向上します。さらに、これは、現在および将来の車両に影響を与える特定のバスプロトコルとアプリケーションの複雑さを調査するための入り口として機能します。




CAN (コントローラエリアネットワーク)
車載ネットワーク技術において、コントローラエリアネットワーク (CAN) は画期的な技術です。柔軟性と堅牢性を考慮して設計された最新の車両で最も多く採用されているネットワークプロトコルの1つになりました。このセクションでは、CANの基本原理と定義機能を詳しく説明し、その実用的な用途と制約を検討するとともに、最新の代替手段についても簡単に触れます。
CANの基礎と特徴
車両内で、CANは、ノードと呼ばれることが多い、デバイス間の効率的な通信と堅牢性を実現するために設計されたシリアル通信バスです。どのデバイスもネットワーク上の他のデバイスにデータを転送できます。つまり、CANはマルチマスターブロードキャスト シリアルバス標準で機能します。
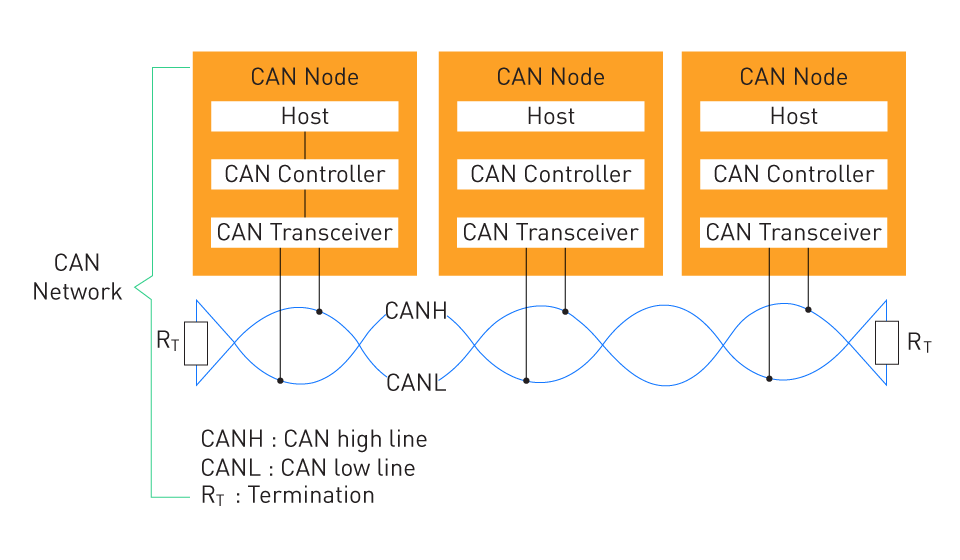
図1 : CANネットワークアーキテクチャ
CANノードには、ホストマイクロコントローラ、CANトランシーバ、およびCANコントローラが含まれます。マイクロコントローラの内部周辺機器は通常、CANコントローラです。終端抵抗器は、2つの信号線間の回路を完成させ、線上の潜在的な反射を軽減するという重要な役割を果たします。標準バス電圧は通常5Vで動作し、信号はシールド付きまたはシールドなしのツイストペアに編成されます。
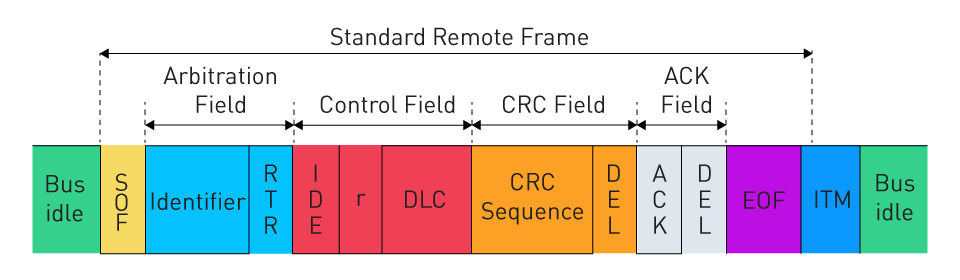
図2 : 代表的なCANフレーム
データレート: 標準CANは最大1Mbpsの速度でデータを転送します。CAN FD (Flexible Data-Rate) などの新しい繰り返しは、より高いデータレートの実現に役立ちます。
誤り処理: 電気的にノイズの多い環境でも強力な通信を確保するために、CANにはCRC (巡回冗長検査)、メッセージ確認、ビットスタッフィングなどの広範な誤り検出および訂正機能が備わっています。
優先度管理: CANメッセージはIDによって優先順位が付けられます。メッセージ送信の優先順位付けは、調停プロセスによって可能になります。調停プロセスでは、ID番号の低いメッセージに高い優先順位が与えられ、重要なメッセージが早期に送信されることが保証されます。
セキュリティ: CANは本質的に安全ではありませんが、セキュリティプロトコルで強化して保護レベルを高めることができます。
規格化: メーカー間で一貫した実装を保証するために、CANはISO 11898で標準化されています。
車両におけるCANの使用例とアプリケーション
CANは柔軟性と信頼性に優れているため、幅広いアプリケーションに最適です。
パワートレイン制御: エンジン、トランスミッション、その他の関連要素が調整されます。
シャーシコントロール: トラクションコントロール、ABS、エアバッグシステムなどのシステムが統合されています。
インフォテインメントシステム: 車内のマルチメディアデバイス、ナビゲーション、エンターテイメントが管理されます。
診断ツール: 車両の潜在的な問題やパフォーマンスをリアルタイムで簡単に診断できます。
テレマティクス: 路車間 (V2I) 通信と車車間 (V2V) 通信が可能です。
フリート管理: 車両の集中制御とモニタリングが可能になります。
CANの限界と最新の代替手段
CANは広く使用されているにもかかわらず、いくつかの制限があります。
データレート制限: 現代のアプリケーションでは、1Mbit/sを超える高速データ転送が必要です。したがって、従来のCANのデータレートでは不十分です。
セキュリティの欠如: 安全な通信を確保するには、外部からセキュリティ機能を追加する必要があり、それが複雑化につながります。
大規模ネットワークの複雑さ: ネットワークが拡大するにつれて、複数のノード間の通信の管理が複雑になる可能性があります。バス負荷率は平均50%を超えてはなりません。これは、信頼性の高い動作を確保しながらバスに接続できるノードの最大数に厳しい物理的な制約があることを示しています。
最新の代替手段
CAN FD: CAN FDは、より高いデータレートとより大きなデータフィールドを可能にするCANの拡張機能です。CAN FDの制御フィールドでは、さまざまなデータレートと任意の長さを設定できるため、柔軟性が向上します。
車載イーサネット: 車載イーサネットは高価ですが、さらに大量のデータと強力なセキュリティを必要とするアプリケーションの代替手段として登場しています。
FlexRay: FlexRayは確定的な通信とより広い帯域幅を提供するため、安全性が重要視されるアプリケーションで使用されます。
車載ネットワークでは、コントローラエリアネットワーク (CAN) がその証拠となります。パワートレインの処理からインフォテインメントシステムまで、その機能により、車両内の幅広いアプリケーションに最適です。CANは非常に汎用性が高く信頼性が高いものの、自動車技術の進歩により、コントローラエリアネットワーク (CAN) 内に一定の制約があることが明らかになり、現代的な代替手段の登場へとつながっています。CANの実際的な用途、制約、将来に影響を与える進化するダイナミクスなどを理解することは、現代の車載システムの相互接続された状況を理解するために不可欠です。
ローカル相互接続ネットワーク (LIN)
自動車通信システムの重要な部品であるローカル相互接続ネットワーク (LIN) は、コントローラエリアネットワーク (CAN) などの他のテクノロジーとともに頻繁に使用されます。LINはコスト効率に優れ、シンプルな通信プロトコルであり、CANの堅牢性と速度が求められない車載サブシステムで一定の価値を発揮します。このセクションでは、LINの基本と機能、およびCANとの統合について説明します。
LINの基礎と特徴
車両要素間の通信には、LIN (シリアルネットワークプロトコル) が利用されます。車載環境では、低コストで低速のアプリケーションに適しています。
マスタースレーブアーキテクチャ: LINは、単一のマスターが通信を制御し、複数のスレーブが応答を提供するマスタースレーブアーキテクチャを採用しています。
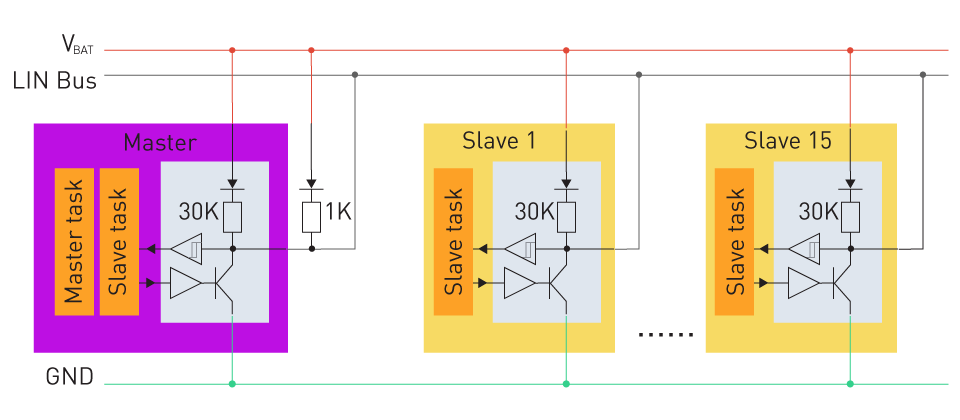
図3 : LINネットワークアーキテクチャ
CANと同様に、LINにはLINコントローラ、ホストマイクロコントローラ、およびLINトランシーバがあります。LINは通常、バッテリーから得られる信号として動作し、各ノードにはバッテリーに接続されたプルアップ抵抗と、LIN信号を下げることができるオープンコレクタスイッチが備わっています。劣性レベルはVbatの60%を超えるレベルに対応し、優性レベルはVbatの40%を下回るレベルとして定義されます。LINはマスタースレーブプロトコルで動作するため、一般的なLINフレームは2つのセグメントで構成されます。最初に、マスターはスレーブをポーリングして通信を開始し、スレーブはそれに応答します。
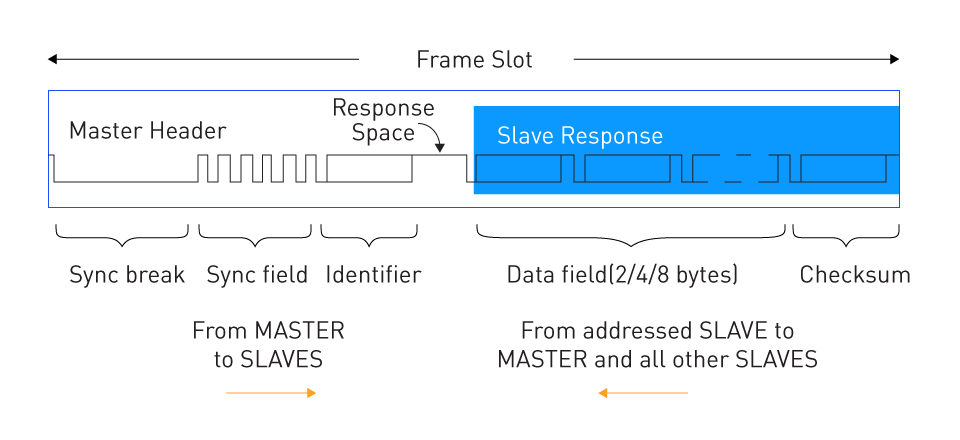
図4 : 代表的なLINフレーム
LINは、コールドクランキングや微小な中断など、さまざまなバッテリー供給の変動に耐えられるよう意図的に設計されています。
データレート: CANとは対照的に、LINはより低速なデータ転送用に特別に設計されており、通常は約19.2kbpsのデータ レートで動作します。
単線通信: コストと複雑さを軽減するために、LINは単一の信号線を使用します。グランドは信号の戻りです。
決定論的通信: LINスケジュールは、各メッセージが送信される正確な時間を定義することにより、予測可能な通信を実現します。
誤り検出: LINにはCANのような広範な誤り処理機能はありませんが、CRC (巡回冗長検査、またはチェックサム) などの基本的な誤り検出機能は備えています。
スリープモード: LINは、通信が不要な場合にエネルギーを節約する低電力スリープモードを備えています。LINはバッテリーの電源から直接動作するため、この機能はバッテリーの消耗を減らすために特に重要です。
規格化: LINは、LINコンソーシアムによって確立されたISO-17897標準に準拠しており、さまざまなベンダー間での相互運用性を促進します。
LINとCANの統合
両方のプロトコルの長所を活用するために、ECU内でLINとCANを統合することは、自動車の設計では一般的な方法です。
階層型ネットワーク: LINは、窓や座席の制御など、それほど重要でない機能を管理します。一方、強力な誤り処理機能と高速化で知られるCANは、エンジン制御などの重要なシステムで頻繁に採用されています。この階層的なアプローチにより、コスト効率と全体的なパフォーマンスが向上します。
ゲートウェイ機能: LINマスターはCANネットワークに頻繁に接続し、複合CAN-LINシステムのゲートウェイとして機能し、LINネットワークとCANネットワーク間のデータ交換を可能にします。
コスト効率の高いソリューション: CANとLINの両方を統合することで、メーカーは重要な部品に対して強力で高速な通信を保証すると同時に (CANを利用)、それほど重要でないサブシステムに対してコスト効率の高いソリューションを展開することができます (LINを採用)。
簡素化された設計: この統合により、基本的な周辺機器にLINを活用してより効率的な設計が可能になり、配線と制御の複雑さが簡素化されます。
強化された機能: 高度な環境制御システムやアダプティブライティングなどの全体的な機能を向上させるために、一部のシステムではCANとLINの両方を活用する場合があります。
低コスト、低速の車載アプリケーションでは、ローカル相互接続ネットワーク (LIN) が重要なプロトコルです。車載環境において、LINは独自の機能と効率的な設計により、多くのサブシステムに魅力的なソリューションを提供します。さらに、LINとCANの統合は、最新車両の設計と操作において重要な役割を果たしており、エレガントでコスト効率が高く、機能豊富なネットワーキングアプローチを提供します。LINをスタンドアロンシステムとして、またCANと組み合わせて理解することは、最新の車載ネットワークを定義する複雑なダイナミクスと進歩を理解するために不可欠です。
FlexRay
先進的な自動車の複雑なリアルタイムかつ安全性が重視されるアプリケーションの厳しい要求を満たすために、車載ネットワーク通信プロトコルであるFlexRayが開発されました。この高速かつ決定論的なネットワークは、従来のCANプロトコルとLINプロトコルの間のギャップを埋める革新的な技術を提供します。このセクションでは、FlexRayについて、LINやCANと比較したFlexRayの利点、および現代の車両におけるFlexRayのアプリケーションについて説明します。
FlexRay入門
高度な車載システムの信頼性ニーズとデータレートの向上を管理する上でのCANとLINの制限に対処するために、FlexRayが開発されました。そのアーキテクチャは、フォールトトレランスを強化するデュアルチャネル操作と、コストを最適化するシングルチャネル操作の両方を促進するように設計されています。CANと同様に、FlexRayは両端に終端抵抗器を備えた差動バス構成を利用します。ライントポロジーでは、FlexRay標準ISO-17485では最大22ノードが推奨されています。
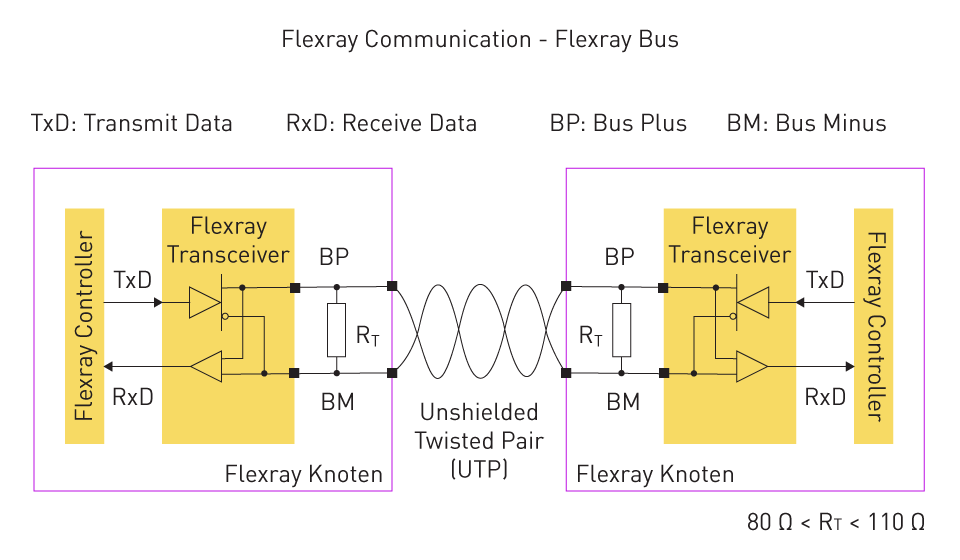
図5 : FlexRayネットワーク (シングルチャネル アーキテクチャ)
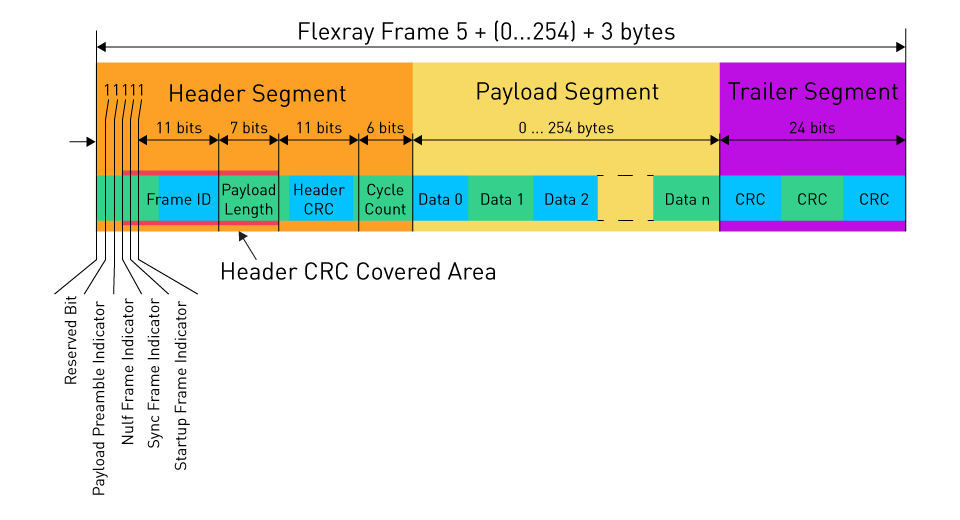
図6 : 代表的なFlexRayフレーム
通信方法: このシステムでは、タイムトリガー (TT) とイベントトリガー (ET) の両方の通信方式が採用されています。タイムトリガーモードでは、データ通信はTDMAラウンドに編成され、各ラウンドはスロットで構成されます。各ノードには1つの送信スロットが割り当てられ、各ラウンドでフレームを送信する必要があります。一方、イベントトリガーモードでは、タスクの終了や割り込み信号などの重要なイベントが発生するたびに、送信者がメッセージを送信できます。この二重のアプローチにより、システムはハードリアルタイム アプリケーションに最適です。
データレート: FlexRayは、最大10Mbpsのデータレートを備え、CANやLINに比べて大幅に高速です。
決定論と柔軟性: 散発的かつ動的なデータに対応するために、FlexRayは柔軟性を提供しながら、高度に決定論的なシステムを提供します。
同期: 時間トリガーメッセージの同時送信を確実にするために、FlexRayネットワーク内のノードは同期されます。
誤り処理: CANと比較すると、FlexRayはより高度な誤り検出および故障閉じこめの手順を備えており、より高い堅牢性を保証します。たとえば、1つのフレームにさまざまなCRCコードを展開します。
CANおよびLINに対するFlexRayの利点
より高いデータレート: FlexRayは10Mbpsという速度がCANの最大値1MbpsやLINの19.2kbpsを大幅に上回っているため、データ集約型のアプリケーションの処理に適しています。
信頼性の向上: フォールトトレランスを強化するために、デュアルチャネルアーキテクチャは冗長性を提供します。
リアルタイムパフォーマンス: タイムトリガー通信は、極めて信頼性の高いデータ転送を保証する、安全性が重視されるアプリケーションにとって重要な要件です。
統合機能: CANおよびLINとシームレスに統合できるため、階層型通信システムを構築できます。
最新自動車におけるFlexRayのアプリケーション
シャーシコントロール: FlexRayは、アダプティブクルーズコントロールなどのシャーシ制御システムにおけるリアルタイムデータ処理に利用されます。
パワートレインシステム: FlexRay は、最新の電気自動車やハイブリッド車のさまざまな要素の協調管理を保証します。
ステアバイワイヤとブレーキバイワイヤ: FlexRayは、その堅牢性とリアルタイム機能により、ブレーキバイワイヤやステアバイワイヤ システムなどの安全性が重要視されるアプリケーションに最適です。
他のプロトコルとの統合: 車内のCANネットワークとLINネットワークをリンクするために、FlexRayは高速の中央インフラストラクチャとして機能することがよくあります。
先進運転支援システム (ADAS): FlexRayはADAS機能の基盤として機能し、自動緊急ブレーキ、車線逸脱警告などの機能を実現します。
FlexRayは、決定論、高速性、柔軟性を提供することで、CANとLINの制限ギャップを埋める車載ネットワークの主要プロトコルとして登場しました。自動車市場の継続的な進化においてそれが果たす重要な役割は、安全性が極めて重要なシステムで広く使用されていることからも明らかです。車両がますます複雑になり、リアルタイム制御と相互接続性が重視されるようになるにつれて、FlexRayは車載設計とエンジニアリングの未来を形作る基礎技術としての地位を確立する態勢が整っています。
車載イーサネット
車載ネットワークの分野において、車載イーサネットは進化の飛躍を意味し、今日の最新車両のデータ集約型ニーズに応える、信頼性が高く、適応性に優れた高速ソリューションを提供します。自動車市場は、通常コンピュータネットワークに関連するイーサネット技術を採用することで、通信、診断、インフォテインメントなどの機能強化を可能にする変革の道を歩み始めました。車載アプリケーションにおけるイーサネットの発展、そのアプリケーション、利点について説明します。
車載アプリケーションにおけるイーサネットの進化
初期段階: コンピュータネットワークの分野では、イーサネット技術は1970年代に導入されました。この技術が自動車業界に最初に取り入れられたのは100BASE-T1の実装から始まり、1本のツイストペアで100Mbpsのデータ レートを実現しました。
車載イーサネットの登場: 車両システムの急速な拡大とデータ要件の増加により、シールドなしのシングルツイストペアケーブルで100Mbpsの通信を可能にするBroadR-Reachなどの車載イーサネット規格が導入されました。
標準化の取り組み: IEEEによる802.3ワーキンググループの設立は、1Gbps通信用に設計された1000BASE-T1などのプロトコルを含む、車載イーサネットの標準仕様を確立することを目的としていました。これらの標準化されたプロトコルは相互運用性を促進し、車載イーサネットテクノロジーの幅広い採用を促進します。
最近の動向: 現在の取り組みは、最大10Gbpsに達するマルチギガビット速度の実現と、リアルタイムパフォーマンスを必要とするアプリケーション向けのタイムセンシティブネットワーキング (TSN) の調査に向けられています。
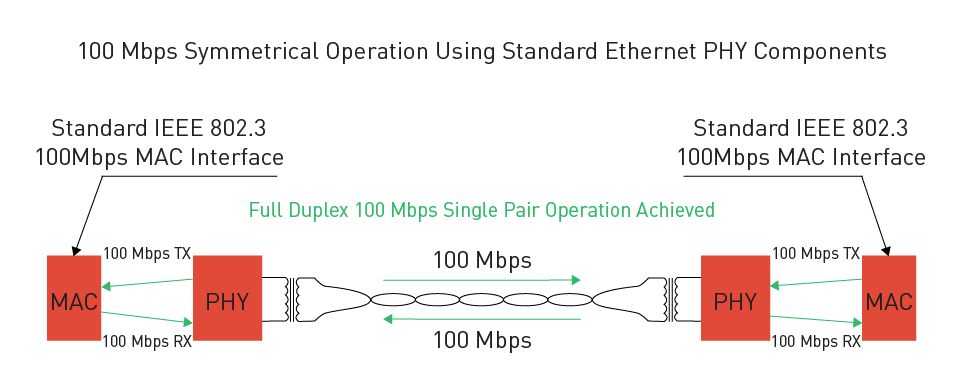
図7 : 100Mbpsイーサネット ネットワーク アーキテクチャ
シングルペアまたはマルチペアの差動信号は、イーサネットバスと呼ばれます。CANおよびLINの場合、コントローラとトランシーバが存在するにもかかわらず、イーサネットにはMAC要素とPHY要素が存在します。絶縁トランスは、信号をPHYから絶縁するために使用されます。これは、シールドされていないケーブルが使用されている場合にコモンモードノイズの放出をさらに低減し、デバイス間の不要な損傷を引き起こす電流ループを防ぐためです。
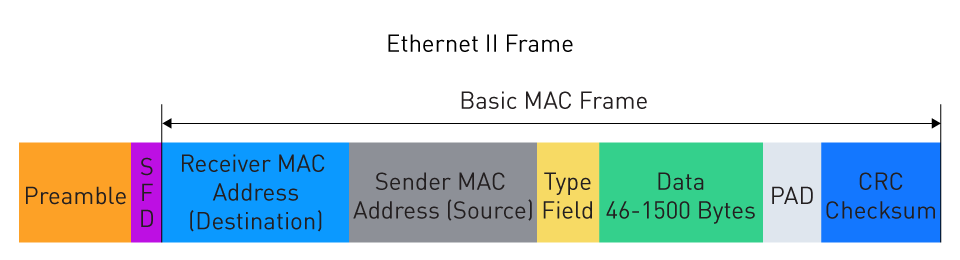
図8 : 一般的な車載イーサネットフレームii (車載イーサネットの使用事例と利点)
車載イーサネットのユースケースと利点
使用事例
- インフォテインメントシステム: ナビゲーション、マルチメディア、HDビデオストリーミングなどの高帯域幅アプリケーションが可能になります。
- 先進運転支援システム (ADAS): 車線維持や衝突回避などの特性に必要なリアルタイムのデータ処理を容易にします。
- 車両診断: 車両診断により、オンボードおよびリモートの高度な診断機能が容易になります。
- センサとカメラの統合: 自動運転にとって重要な、さまざまなカメラやセンサを接続する上で重要な役割を果たします。
利点
- 高帯域幅: データ集約型アプリケーションに対応するために、100Mbpsから10Gbpsまでの速度を提供します。
- コスト効率: コストと重量を軽減するために、シールドなしツイストペアケーブルを使用します。
- 拡張性: 低速ボディ制御から高速ビデオおよびセンサデータ伝送まで、さまざまな自動車ニーズに適応します。
- 相互運用性: 標準化により、幅広いデバスやシステム間の互換性が保証されます。
- 堅牢性と信頼性: 回復力のある通信を保証するために、誤り検出および修正手順が含まれます。
- リアルタイム通信のサポート: TSNなどの標準は確定的なデータ転送機能を提供するため、安全性が重要視されるアプリケーションに最適です。
車載イーサネットは、従来のイーサネットの固有の長所を活用し、今日の自動車の特有の要件を満たすようにカスタマイズすることで、車両の通信方法に革新的な変化をもたらします。コスト効率、適応性、高帯域幅により、インフォテインメントや自動運転システム向けの先進的な車載設計に最適なオプションとなっています。
自動車市場における基礎技術としての車載イーサネットの役割が確立されたのは、イーサネット規格の継続的な進化と他の車載ネットワークプロトコルとのシームレスな統合によるものです。その適応性により、近い将来も車載アーキテクチャの重要な部分であり続けることが確実です。この適応性は新興技術と一致しており、インテリジェントでコネクテッドな自律走行車の継続的な成長を促進します。
MOST (メディア指向システムトランスポート)
MOST (Media Oriented Systems Transport) テクノロジーは、自動車のインフォテインメントシステムの強化のために綿密に調整されマルチメディアネットワークおよびトランスポートの特別規格です。MOSTは、オーディオ、ビデオ、制御データ用の堅牢で高品質のインタフェースを提供するため、現代の自動車業界に不可欠な要素になります。このセクションでは、MOSTの概要を説明し、インフォテインメントシステム、通信原理、ネットワークトポロジーにおけるそのアプリケーションについて説明します。
インフォテインメントシステムにおける導入とアプリケーション
MOSTテクノロジーは、車内のインフォテインメントとマルチメディアのニーズを管理するために特別に構築されており、同期型時分割多重化ネットワークです。これは、制御メッセージとデータを単一の物理チャネル経由で送信するために特別に作成されています。
インフォテインメントシステムにおけるアプリケーション:
- オーディオとビデオのストリーミング: MOSTは、オーディオ信号とビデオ信号の即時伝送を容易にし、サラウンドサウンド、HDラジオ、DVD再生などの高度な機能を実現します。
- ナビゲーションシステム: GPSナビゲーションとマルチメディア操作の統合を促進します。
- ユーザーインタフェース: 車内のタッチスクリーン、ディスプレイ、制御要素を処理します。
- モバイルデバイスとの統合: 音楽ストリーミングやハンズフリー通話などの機能により、スマートフォンやその他のデバイスとのシームレスなインタフェースが可能になります。
標準と世代: MOSTは、MOST25、MOST50、MOST150に至るまで複数の反復を経て進化しており、世代ごとにデータレートが向上し、機能が追加されています。
MOSTにおけるネットワークトポロジーと通信
MOSTでは、ノードがループ状にリンクされたリングトポロジーが利用されます。構成に応じて、リング経由のデータ転送は一方向または双方向で行われます。
- ノード: アンプ、ディスプレイ画面、ヒートユニット、その他のマルチメディア機器で構成されています。
- チャネル: 制御、非同期、等時性チャネルを含むさまざまなデータに対して、MOSTは個別のプラットフォームを定義します。
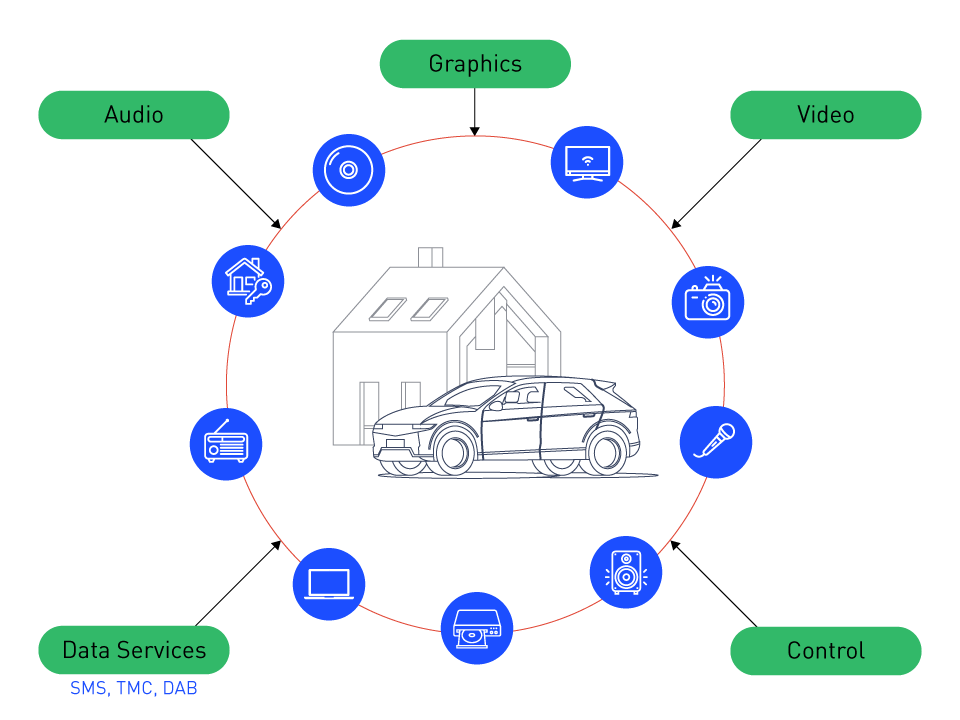
図9 : MOSTネットワークリングトポロジー
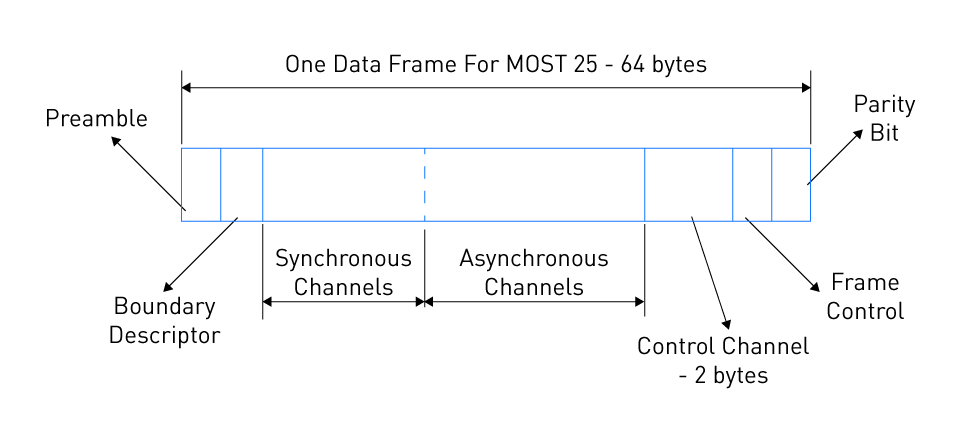
図10 : MOST25 フレーム
コミュニケーションの原則
- 時分割多重化 (TDM): 情報はセグメント化されたフレームで伝送され、各セグメントはリングバス内の特定の送信ノードに割り当てられます。この方法により、ノードはバスの速度をフルに活用できます。
- 制御と同期: 同期と帯域幅の割り当てを維持するために、マスターノードがネットワークを処理します。
- データ転送: これは、パケット (非同期)、ストリーミング (等時の)、制御 (同期) などのさまざまなデータタイプをブーストします。
物理層: MOSTは、光ファイバー (MOST25)、電気 (MOST50)、同軸 (MOST150) を含むさまざまな物理層にわたって機能することができ、それぞれが独自の機能とアプリケーションを備えています。
フォールトトレランスと信頼性: 故障修正や反復性などの特性により堅牢な機能が保証され、1つのノードの障害が他のノードの機能に影響を与えることはありません。
車載のマルチメディアおよびインフォテインメントシステムでは、MOSTテクノロジーによって、車両内でのマルチメディアアプリケーションの忠実度が向上し、簡単に統合できるようになります。最新のインフォテインメント機能を提供することを目標とする自動車メーカーにとって、そのユニークな設計は、リアルタイムのオーディオ、ビデオ、および制御データを管理するための革新的なソリューションであることが証明されています。
MOSTは、その通信原理とネットワークトポロジーにより、堅牢性と適応性を提供し、複数のデータタイプと物理的な伝送媒体に役立ちます。継続的な成長とさまざまな車載ネットワーク技術とのシームレスな統合により、柔軟性と関連性が継続的に保証され、現代の車載エンターテイメントおよび情報システムの高まる要件に効果的に対応します。
バスシステムの比較
現代の自動車業界では、さまざまなサブシステム間の複雑かつ多面的な通信が必要です。これらの要求は、それぞれ特殊な機能を備えた複数のバスシステムによって満たされます。このセクションでは、LIN、イーサネット、MOST、CAN、FlexRayなど、広く採用されているバスシステムを包括的に比較し、特定のアプリケーションに適したバスシステムを選択する方法について説明します。
CAN、LIN、FlexRay、イーサネット、MOSTの特徴のまとめ
CAN (コントローラエリアネットワーク)
- データレート: 最大1Mbps
- トポロジー: 両端に終端抵抗を備えた差動バス
- 使用方法: リアルタイム制御システムと重要なセンサデータ
- フォールトトレランス: ノイズや故障に対する高い耐性
- 複雑: ハードウェアとプロトコルの面で中程度の複雑さ
LIN (ローカル相互接続ネットワーク)
- データレート: 最大20kbps
- トポロジー: 単一マスター / 複数スレーブ構成、終端抵抗なし
- 用途: 窓、ミラー、シートなどの重要でないシステム
- フォールトトレランス: 限定的な誤りチェックと故障の制限
- 複雑: 低コストでシンプルな設計
FlexRay
- データレート: 最大10Mbps
- トポロジー: ハイブリッド (スターまたはリニアバストポロジーとして構成)
- 用途: タイムクリティカルなアプリケーション、Xバイワイヤシステム
- フォールトトレランス: 高度な誤り検出と故障抑制
- 複雑さ: 高い (複雑な設定と調整が必要)
車載イーサネット
- データレート: 100Mbps~1Gbps以上
- トポロジー: スイッチを使用したスタート型トポロジー
- 用途: ADAS、インフォテインメントなどの高帯域幅アプリケーション
- フォールトトレランス: 実装次第、一般的には堅牢
- 複雑さ: 中程度から高程度、より広範な配線
MOST (メディア指向システムトランスポート)
- データレート: 25Mbps (MOST25) ~ 150Mbps (MOST150)
- トポロジー: リング型トポロジーレート
- 用途: マルチメディアおよびインフォテインメントシステム
- フォールトトレランス: シームレスなマルチメディア転送のために設計
- 複雑さ: マルチメディア処理向けにカスタマイズ、インフォテインメントに特化
特定のアプリケーションに適したバスシステムの選択
理想的なバスシステムの選択は、アプリケーションの特定の要件と制限によって異なります。
クリティカルコントロールシステム: CANとFlexRayは、リアルタイム制御と誤り修正を必要とするアプリケーションに適している可能性があります。要求の少ない条件ではCANが頻繁に選択され、時間に敏感なタスクではFlexRayが選択されます。
低コストで重要ではないシステム: 快適機能など、安全性がそれほど重要でない領域では、LINが理想的です。
高帯域幅と高度なシステム: より広い帯域幅と、ADASや接続ソリューションなどの複雑なアプリケーションのニーズは、車載イーサネットによって満たされます。
マルチメディアとインフォテインメント: MOSTは、同期とサービス品質を提供しながら、現代のマルチメディアシステムの厳しいニーズを満たすために特別に設計されています。
ハイブリッドソリューション: これらのシステムの組み合わせと必要な統合は、先進的な車両で頻繁に使用されます。たとえば、LINとCANの組み合わせは、重要な操作と重要でない操作を組み合わせたコスト効率の高い制御オプションとして使用されます。
現在および将来の複雑な車載システムを構築するには、CAN、LIN、MOST、イーサネット、FlexRayのさまざまな機能、性能、制限を理解することが重要な役割を果たします。複雑さ、コスト、フォールトトレランス、データレートのニーズ、特定の機能などの要因が、最適な選択を決定します。
現在のバスシステムの一部は、継続的に進化する業界と新たなトレンドやテクノロジーによってすぐに置き換えられる可能性があります。先進的な自動車に必要な複雑な車両通信ネットワークを設計し、導入するには、エンジニアが十分な準備を整えていなければなりません。したがって、車載ネットワークの最新の開発に継続的に関与することでこれを保証する必要があります。
アカウントにログイン
新しいアカウントを作成