ADASにおけるセンサとアクチュエータの役割
先進運転支援システム (ADAS) に関しては、車両のセンサは車両の「目と耳」となります。さまざまなセンシング技術により、ADAS搭載車は環境を感知し、理解し、反応することができます。これらの高度なシステムは徐々に発展し、車両の効率、利便性、安全性が向上しました。このセクションでは、現代のADASシステムの基盤となっている主要なセンシング技術について詳しく説明します。
カメラ
ADASの光学感覚器官として、カメラは車の周辺環境をリアルタイムで撮影します。
機能性: カメラは交通標識を読み取り、物体を識別して分類し、車線を検出し、歩行者の動きを追跡することができます。
利点: 高分解能で色を検出できるため、交通標識の認識などの作業に非常に役立ちます。
制限事項: レンズが遮られている場合、悪天候の場合、暗い場所では、レンズの効果が低下する可能性があります。
カメラのタイプ
リアビューカメラは、車の後部に取り付けるために特別に作られています。高級車からエコノミーカーまで幅広く普及しており、今は運転手にとってバックする時、衝突防止や後方の死角を減らす際に便利なツールとなっています。
前方カメラ: ほとんどの場合、これらのシステムは車両の前部にあるバックミラーの後ろに取り付けられます。ADASフロントカメラ (FC) システムは、車両、二輪車、歩行者など、実世界で関心のあるものを記録および認識します。対象物と車両からの距離を識別すること、そして衝突を防ぐために適切なタイミングで緊急ブレーキをかけることが、ADAS FCの2つの主要なタスクです。
ドライバーモニタリングシステム: 車内の注意レベルを追跡するように設計されたドライバーモニタリングシステム (DMS) は、高度な自律運転機能を実現するために不可欠です。これは、運転手を識別し、その警戒レベルを追跡し、最初の疲労の兆候を特定することによって行われます。この技術により、タッチフリーのジェスチャーコントロール機能を実現し、インフォテインメント・インタフェースをさらに向上し、安全コンセプトを最高レベルに引き上げ、運転支援機能のよりインテリジェントな導入を促進することができます。車内の乗員の検知、チャイルドシートの占有状況、姿勢分析にも適しています。
サーマルカメラ: 自動運転システムや運転支援システムは、完全に暗い環境や視界が悪い環境でも機能できなければなりません。サーマルカメラは受動的であり (つまり、場の照明を必要としない)、周囲の光のレベルに依存しないため、このような状況では有利です。追加のセンサと組み合わせると、人、車、動物、その他の障害物など、周囲の物体を正確に識別して分類できるようになります。また、自動運転車に必要な信頼性と冗長性も向上します。
レーダー
レーダーは、車両に対する物体の位置、速度、方向を判断するために電波を使用します。
機能性: レーダーは、車両の周囲にある物体の位置と速度を検出するために広く使用されています。アダプティブクルーズコントロール、衝突回避、死角モニタリングにも使用されます。
利点: レーダーは、雨や霧など、さまざまな気象状況において信頼性が高く、効果的です。
制限事項: レーダーは距離と速度の測定に優れていますが、他のセンサと同じレベルの詳細さで物体を区別できない場合があります。
光検出と測距 (LIDAR)
LIDARは、パルスレーザービームを発射し、ビームが物体に反射して戻ってくるまでの時間を計測することで、周囲の正確な3次元マップを作成します。
機能性: LIDARは周囲の奥行きをモニタして、特に自動運転車に役立つ高解像度の写真を作成します。これらはナビゲーションと障害物検出において重要な役割を果たします。
利点: 周囲の広角画像を提供でき、精度も向上します。
制限事項: 設計コストの高さや、長雨などの特定の気象条件に対する脆弱性により、広範な導入が妨げられる場合があります。自動運転の先駆的な自動車メーカーのすべてがLiDAR技術を採用しているわけではありません。たとえば、テスラは自社の車にこれを利用するつもりはありません。
超音波センサ
コウモリが自分の方向を確認するために使用する音波高度計の概念は、超音波センサにも使用されています。バリアはセンサが発する短い超音波インパルスを反射します。センサはエコー信号を記録し、それは中央制御ユニットによって処理されます。
機能性: これらのセンサは主に駐車を支援するために使用され、車の近くにある物体を識別し、縦列駐車などの操作中に運転手に指示を出します。
利点: さまざまな環境状況で機能し、短距離検出に効果的です。
制限事項: 近距離での使用にのみ適しており、高速では効力が低下する可能性があります。
結局のところ、これらのセンシングシステムを組み合わせることで、ADASは完全な認識ツールキットを実現し、各センサが他のセンサの欠点を補うことになります。これらを組み合わせることで、自動車の安全性と支援機能の強力な基盤が提供され、現代においてより安全で効果的な運転が可能になります。
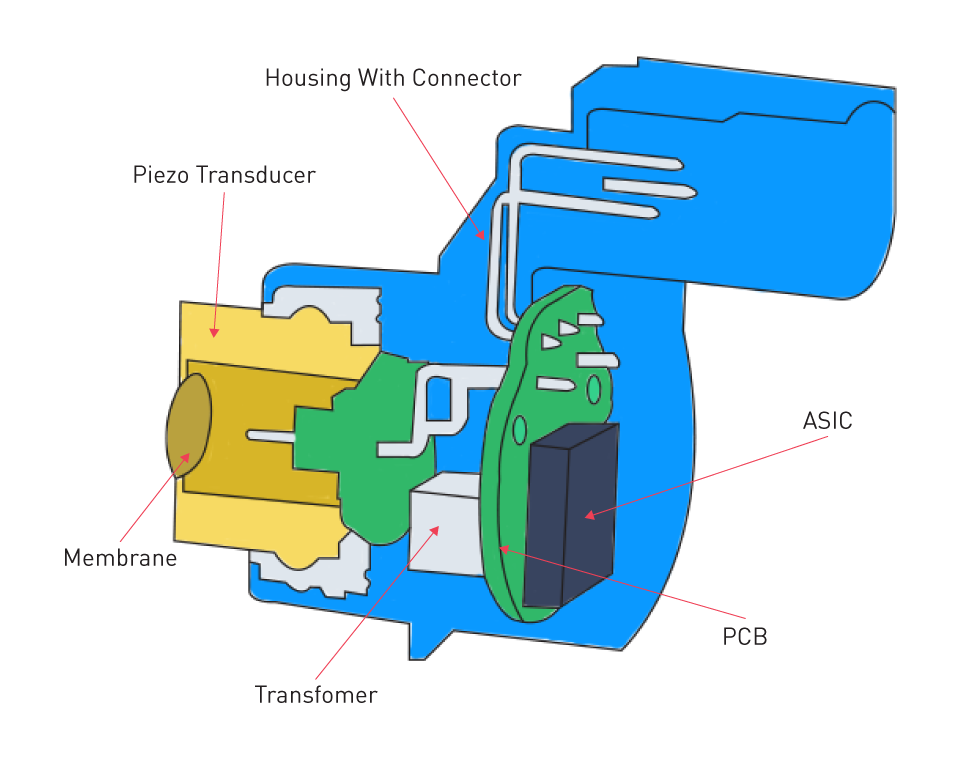
図1 : 超音波センサの部品




ADASにおけるアクチュエータ
先進運転支援システム (ADAS) の複雑なネットワークを理解するには、アクチュエータの機能を理解することが非常に重要です。アクチュエータはシステムの筋肉であり、感知したデータから得られた洞察に応じて動作を実行します。一方、センサはシステムの目と耳であり、車両周囲の環境に関する重要な情報を提供します。ADASにおけるアクチュエータの重要な機能と、よく使用される種類について詳しく見てみましょう。
ステアリングアクチュエータ
自動駐車や車線維持支援などのADAS機能には、ステアリングアクチュエータが不可欠です。
機能性: これらのアクチュエータは、車を車線内に維持したり、駐車スペースに誘導したりするために、センサ情報に応じてステアリング角度を修正します。
ブレーキアクチュエータ
車両を設計する際、安全性は依然として最優先事項です。ブレーキアクチュエータは、衝突防止や緊急ブレーキなどのADAS機能で大きな役割を果たします。
機能性: ブレーキアクチュエータは、衝突の可能性に関するデータを受信すると、適切なブレーキ力を適用して衝撃を防止または軽減します。
加速アクチュエータ
加速アクチュエータは車両の推進力を制御し、渋滞時の支援やアダプティブクルーズコントロールなどの機能に不可欠です。
機能性: これらのアクチュエータは、センサデータに応じてスロットルを調整することで、他の車や障害物との安全な距離を維持し、交通の流れに応じて速度を変更します。
要するに、アクチュエータは、必要に応じて車両の動きを変更することにより、環境認識に基づく判断を実現します。センサは周囲の状況を感知する役割を担っています。ADASは、センシングとアクチュエーションの調和のとれた相互作用により、車両がこれまでにないレベルの快適性、効率性、安全性を実現することを可能にします。自動車業界が完全な自動運転に近づくにつれて、これらのアクチュエータの精度と信頼性はさらに重要になります。
センサとアクチュエータの融合
先進運転支援システム (ADAS) の領域では、センサとアクチュエータのスムーズな統合は、ハードウェアの配置以上のもので、協調動作と安全性の向上のための媒体として機能します。さまざまなセンサからの入力を使用して意味のある判断を行い、アクチュエータがそれを実行する「センサとアクチュエータの融合」プロセスがその鍵となります。この統合手順のニュアンスについて調べてみましょう。
データ処理と意思決定
ADASは、LIDAR、カメラ、レーダー、超音波センサなど、多数のセンサからの大量のデータによって過負荷になります。ただし、実用的なインテリジェンスは生データと同じではありません。したがって、このデータを有用な洞察に変えることが重要な第一歩になります。
センサデータの融合: 正確性と冗長性を確保するには、同じ物体や障害物を頻繁に識別する複数のセンサからのデータを結合して調和させる必要があります。環境の首尾一貫した描写を作成するために、アルゴリズムは各センサのデータの明瞭さと信頼性を個別に評価します。
意思決定ロジック: まとまりのあるイメージの形成に続いて、ADASは事前に確立されたロジックルール (多くの場合、機械学習によってサポートされています) を使用して、最適な行動方針を決定します。このような状況では、運転手への直接的な警告や、ブレーキなどの自動介入が使用される可能性があります。
アプリケーション例
近距離カメラと超音波センサにより完璧な駐車が可能になる : マルチカメラシステムにより、アシスト駐車機能や自動駐車機能を確実に実装することが可能になります。近距離カメラと超音波センサを組み合わせて使用することで、センサデータを制御ユニットに集約し、シーンをより徹底的かつ確実に把握できる3次元の全周囲画像を作成できます。データ融合により、駐車場のマーカー、物体、その他の道路利用者を認識して理解することが可能になります。これにより、ホームゾーンパークアシストや (リモート) パーキングアシストなどの駐車機能の信頼性とセキュリティが向上します。たとえば、自動車が駐車場から後退するときに、システムは歩行者が車の前を通り過ぎることを検出し、その情報をブレーキ制御システムに伝え、自動的に緊急ブレーキを作動させます。
自動緊急ブレーキ用レーダーセンサと多目的カメラの組み合わせ : 自動緊急ブレーキシステムは、レーダーセンサと多目的カメラを組み合わせて、他の車両との接近する前方衝突を検出し、衝突を防止または衝突の影響を軽減するように動作を調整します。前方衝突予測警報 (FCW) を組み込むことで、システムは衝突の接近を運転手に通知し、自動ブレーキを開始することができます。
協調動作のための制御アルゴリズム
選択をすることは、問題の一部にすぎません。タイムリーでシームレス、かつ十分に調整された実装を確保することは、それ以上に重要です。
フィードバックループ: アクチュエータは、精度を保証するために、意思決定モジュールに頻繁にフィードバックを提供します。たとえば、システムがステアリングホイールを一定量回すことを決定した場合、フィードバックによって正確な回転角度に達することが保証されます。
予測制御: 予測制御は、車両の現在の状態と周囲の予想される状態を考慮してアクチュエータの動きを調整します。これは予測アルゴリズムによって行われます。この積極的な戦略は、よりシームレスな車両運用に貢献します。たとえば、アダプティブクルーズコントロールを使用すると、システムは他の車の位置や速度の変化に合わせて調整します。この技術は、レーダーとビデオセンサからのデータを組み合わせることで、安全な車間距離を維持するためにACCパラメータを動的に変更します。
同期: アルゴリズムは、緊急ブレーキとステアリング補正の組み合わせなど、複数のアクチュエータがほぼ同時に動作する必要がある状況で、操作が同期され、最良の結果が得られるようにします。
セーフティネット: アルゴリズムは、センサデータが矛盾したり、意思決定の状況が不明確になったりするといった万が一の事態に備えて、安全性を優先するように構築されています。多くの場合、最も慎重な行動を選択したり、運転手に制御を返したりします。たとえば、車線維持支援機能は、矛盾したセンサデータや不明瞭な道路標示を検出した場合に、運転手にステアリング制御を再開するよう穏やかに警告することで、安全性を優先します。
本質的に、ADASにおけるアクチュエータとセンサの統合は、感嘆すべき現代のエンジニアリングを証明しています。洗練されたアルゴリズムとエンジニアリングの複雑な融合の目的は、運転の快適性と交通の安全性を高めることです。センサとアクチュエータの融合のさらなる開発により、ADASシステムが進化し続けるにつれて、完全な自律走行車の目標にさらに近づくことを約束しています。
アカウントにログイン
新しいアカウントを作成