アダプティブクルーズコントロール (ACC)
古い車に見られる従来のクルーズコントロールシステムと比較すると、アダプティブクルーズコントロール (ACC) は大きな進歩です。ACCが周囲の環境に基づいて動的な速度調整を行う方法は、ADASが運転の快適性と安全性を向上させる方法の最も良い例です。
動作原理
アダプティブクルーズコントロールの基本的な考え方は、自動車を所定の速度で走行させながら、前方の車との安全な車間距離を保つように速度を自動的に変更することです。ACC は、前方の道路が空いている場合、事前に設定されたペースを維持します。ACCシステムは、同じ車線でより低速で走行している他の車両を検出すると、ブレーキをかけたり減速したりして自動的に速度を下げます。ACCのおかげで、道が再び空くと、車は所定の速度まで加速します。
部品とサブシステム
センサ: センサはシステムの目であり、距離を測定したり車を発見したりするために不可欠です。主なセンサには、フロントガラスに設置されたカメラや、車両のフロントグリルによく見られるレーダーなどがあります。精度を高めるために、より高度なACCシステムでは、LIDARや超音波センサも追加で使用される場合があります。
エンジン制御ユニット (ECU): ACCモジュール、エンジン制御ユニット、計器クラスタ、ブレーキ制御モジュールは、ACCの機能に含まれるECUです。
アクチュエータ: これらの部品は、ブレーキ制御モジュール、エンジン制御モジュール、またはBEV車両の場合はインバータからの指示を受けて、スロットルを開けたりブレーキをかけたりといった必要な機能を実行します。
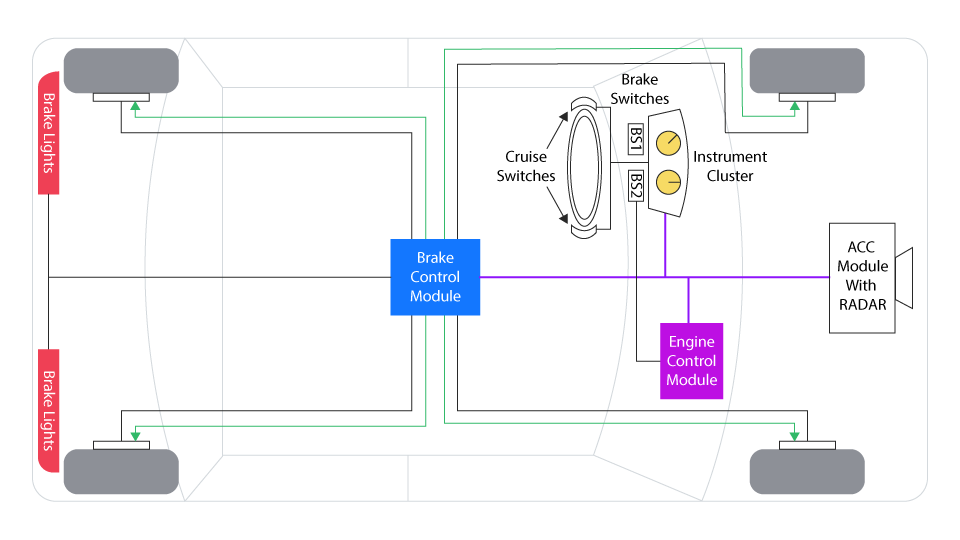
図1 : ACCシステム部品
必要な減速率に応じて、ACCシステムはブレーキシステムを作動させるか、スロットルを絞ります。
ACCシステムは、車両を加速し、意図したペースで走行し続けるためにスロットルを修正します。
安全性とヒューマンファクタ
オーバーライド機能: セキュリティは依然として最優先事項です。運転手はブレーキまたはアクセルを踏むことで、いつでもACCをオーバーライドして完全な制御を維持できます。
人間と機械のインタラクション: ACCシステムには、システムの作動、解除、または故障について運転手に知らせるための視覚的および音声的なアラームが装備されています。
運転行動分析: アルゴリズムを搭載した高度なACCシステムは、運転の習慣を監視し、攻撃的な運転や運転手の疲労を察知して適切な介入や警報で反応します。
限界認識: 運転手に技術の限界を知らせる必要があります。たとえば、悪天候や視界不良の場合にはセンサの有効性が低下し、ドライバーによる手動での介入が必要になる場合があります。
ADASテクノロジーの考え方はACCによってうまく具体化されており、人間の運転手に代わるのではなくサポートすることを目的とした自動化の完璧な融合です。ACCシステムの複雑さと信頼性は、技術の進歩とともにさらに高まることが予想され、運転が完全に自動化される時代がさらに近づくことになります。




車線逸脱警報および車線維持支援
さまざまなADASテクノロジーは、多くの交通事故の大きな要因となっている意図しない車線逸脱を回避するように設計されています。このスイートに含まれる2つの補完的なシステムは、車線逸脱警報 (LDW) と車線維持支援 (LKA) です。
動作原理
車線逸脱警報 (LDW): このシステムはカメラを使用して車線標示を識別し、車線内の車両の位置を追跡します。LDWシステムは、不注意による車線逸脱 (方向指示器を使用せずに) を検出すると、視覚、聴覚、または触覚フィードバックによって運転手に通知します。ここでは、運転手に車の軌道を調整させることが主な目的です。
車線維持支援 (LKA): このテクノロジーは、車線逸脱警報 (LDW) を超え、車線逸脱を検知して是正措置を開始します。運転手が最初の警告に反応していないとシステムが判断した場合、差動ブレーキをかけるか、車を車線内に戻すことで、自動的に車の中心位置に戻ります。
部品とサブシステム
カメラ: これらのカメラは通常、フロントガラスのバックミラーの後ろに設置され、車線マーカーを検出するように調整されています。さらに高度なシステムでは、ペイントされた線、ボッツドット、その他の種類の車線標示を区別することができます。
エンジン制御ユニット (ECU): ECUがシステムの動作にどのように貢献するかは、車によって異なります。これらは、一般的には、インストルメントクラスタ、ボディコントロール ユニット、パワーステアリング モジュール、自律緊急ブレーキまたはブレーキコントロールモジュール、パワートレイン コントロールユニット (BEVの場合はインバータ)、および車線逸脱警報 / 車線維持支援ユニットです。
アクチュエータ: アクチュエータはLKAフレームワークに不可欠です。必要に応じて差動ブレーキ (ブレーキ制御モジュール) またはステアリング角度調整 (パワーステアリングモジュール) を使用して、車両を車線内に再配置することができます。
Kia Stingerの例では、次の4つの機能が実現されています。
- 車線維持支援 (LKA): このシステムは、カメラ画像と車両信号情報を使用して、前方の車線の識別を支援し、車両が車線から外れ始めると車線逸脱警報を発することを目的としています。
- ハイビームアシスト (HBA): この機能は、前方の車のヘッドライトとテールライトを検出してハイビームをオン / オフします。
- インテリジェント速度制限警報 (ISLW): インテリジェント速度制限警報 (ISLW) システムは、カメラを使用して交通標識を識別し、ナビゲーションマップのデータを使用して速度制限を表示します。
- 前方衝突回避支援 (FCA): 前方衝突回避支援 (FCA) システムがサポートされています。
安全性とヒューマンファクタ
ドライバーエンゲージメントモニタリング: これらのシステムは半自律型であるため、運転手が関与し続けるようにすることが重要です。運転手の不注意を識別し、さまざまな方法で運転手に注意を払い続けるよう警告するモニタリングシステムは、高度なLDW、および、LKAセットアップの一部です。たとえば、警報音が鳴ったり、インフォテインメント画面にメッセージが表示されたり、振動やステアリングホイールの小さな動きなどの触覚フィードバックがあったり、あるいは前述の警告の組み合わせがあったりします。これらのシステムは半自律的な性質を持っているため、運転手が関与し続けることを保証することが重要です。高度なLDWおよびLKA設定には、運転手の不注意を検出し、さまざまな方法で運転手に注意を促すモニタリングシステムが含まれています。たとえば、ダッシュボードのライト点滅、警告音の再生、振動や微妙なステアリングホイールの動きなどの触覚のフィードバック、インフォテインメント画面へのメッセージ表示、または前述のものを組み合わせた警告などです。
システム制限の教育: 運転手は、他のADAS機能と同様に、LDWとLKAの制限についても知らされる必要があります。雪や激しい雨などの状況では、車線が不明瞭になり、システムの効率が低下する可能性があります。同様に、車線標示が薄れている場所では、システムはうまく機能しない可能性があります。
オーバーライドシステム: 安全が最優先事項であるため、運転手はLKA介入を無効にできる必要があります。運転手が意図的にハンドルを回すと、システムが車を車線内に戻そうとしたときにシステムがオーバーライドされます。
フィードバックバランス: 誤報が多すぎると、運転手はそれを無視したり、システムをオフにしたりすることがあり、システムの有効性が低下します。最適な感度を得るためにシステムを調整することは非常に重要です。つまり、小さな逸脱に対して過剰に警告したり、実際の逸脱を無視したりしないようにする必要があります。
まとめると、LDW、および、LKAシステムは、ADASが交通安全性を大幅に向上させる可能性があることを示す優れた例です。これらの技術革新により、車線逸脱による衝突の可能性が低減し、より安全な道路と交通事故による死亡者の減少が実現します。ただし、すべてのADAS機能と同様に、自動化と人間による制御のバランスをとることが重要です。
自動緊急ブレーキ (AEB)
自動緊急ブレーキ (AEB) は、先進運転支援システム (ADAS) の重要な構成要素であり、道路の安全性を向上させる重要な技術です。その主な役割は、危険な運転状況を認識し、自動的にブレーキを使用して事故を停止または軽減することです。このセクションでは、AEBの部品、ヒューマンファクタ、および運用哲学について説明します。
動作原理
自動緊急ブレーキは、道路の状態と車の前方にある物体の相対速度を監視しながら機能します。システムは、他の車、歩行者、またはその他の障害物を含む正面衝突の可能性があると認識した場合、まず運転手に警告を発します。AEBシステムは、運転手が設定された時間内に適切に反応しない場合に、自動的にブレーキをかけて衝突を回避したり、衝突の重大性を軽減したりします。
通常、運用アルゴリズムは次の2つの主要な段階に分かれます。
リスク評価: センサデータを使用して、車両と前方の物体間の距離と相対速度を決定します。その後、衝突までの時間を計算してブレーキが必要かどうかを判断します。
介入: AEBシステムは、リスク評価によって状況が危険であると判断された場合、速度、物体のサイズ、道路状況に応じて力を変えながらブレーキをかけます。
部品とサブシステム
センサ: 物体の識別と距離の測定には、レーダー、カメラ、場合によってはLiDARの組み合わせが利用されます。
エンジン制御ユニット (ECU): AEB機能は、スタンドアロンのAEBモジュールであるか、またはESC (電子安定性制御) モジュールに統合されていることがよくあります。インストルメントクラスタやトランスミッション コントロールユニット / インバータなどのさまざまなモジュールと通信します。
ブレーキアクチュエータ: ブレーキを開始する決定が下された後、これらは必要なブレーキ力を適用する役割を担います。これらのアクチュエータは応答時間が速く、ブレーキ力全体を適用できます。
運転手の信頼: システムの有効性は、運転手がAEBを信頼しているかどうかにかかっています。この信頼は、過度に敏感なAEBによって誤った警告が発せられ、運転手が機能をオフにしてしまうことで損なわれる可能性があります。
オーバーライドメカニズム: 運転手がシステムをオーバーライドできるメカニズムを備えることは、安全上の理由と法的理由の両方から不可欠です。これは、運転者がブレーキをかける必要がない、またはブレーキをかけると追突されるなどの別の種類の事故につながる可能性があると考えている場合に特に当てはまります。
ユーザー教育: この技術に過度に依存することを避けるために、運転手は、悪天候や高速走行時には完全に機能しないなど、システムの限界を認識する必要があります。
規制遵守: AEBシステムが使用承認を受けるには、性能、信頼性、安全性に関する厳格な規制基準を満たす必要があります。
高度なセンシング技術と複雑なアルゴリズムを統合することで、自動緊急ブレーキは交通の安全性を大幅に向上させます。この重要なADAS機能が広く採用され、効果を発揮するには、自動化と運転手の制御、そして信頼や注意力などの人間的側面の間で微妙なバランスをとる必要があります。
その他のADAS機能
進化を続ける先進運転支援システム (ADAS) は、運転手の安全性、利便性、全体的な運転体験を向上させる幅広い機能を提供します。ADASに関する話題は主にアダプティブクルーズコントロール、車線逸脱警報、自動緊急ブレーキに焦点が当てられていますが、考慮すべき重要な側面が他にもいくつかあります。このセクションでは、交通標識の認識、死角モニタリング、駐車支援の3つのテクノロジーについて説明します。
交通標識認識 (TSR)
動作原理
カメラを使用した交通標識認識システムにより、交通標識をリアルタイムで検出、識別し、車両に通知することができます。主な目的は、運転手が速度制限や禁止行為など、交通標識の重要な情報を見逃さないようにすることです。
部品とサブシステム
- カメラシステム: 前方の道路の写真を撮るために、通常はフロントガラスに前方カメラが取り付けられます。
- 画像処理アルゴリズム: これらのアルゴリズムは、標識をその内容、形状、色で識別してから、識別可能なグループに分類します。
- ヒューマンマシンインターフェース (HMI): システムは認識すると、ダッシュボードまたはヘッドアップディスプレイ (HUD) に標識情報を表示して運転手に参考情報を提供します。
安全性とヒューマンファクタ
さまざまな環境状況 (雨、霧、暗い場所など) でシステムが正確に指示を認識して理解できるようにすることが重要です。不正確な情報により運転手が無知な判断を下す可能性があり、システムの信頼性がいかに重要であるかを際立たせます。
ブラインドスポットモニタリング (BSM)
動作原理
ブラインドスポットモニタリング装置は、死角にある車や障害物を運転手に警告することで、どの車線を変更するかを判断するのに役立ちます。
部品とサブシステム
- センサ: 車の死角にある車や物体は、通常、サイドミラーやリアバンパーに取り付けられたレーダーや超音波センサによって検出されます。
- 警告システム: 車が運転者の死角に近づくと、音声警告とサイドミラーの視覚サインによって運転者に警告が発せられます。
安全性とヒューマンファクタ
車線変更時に起こり得る衝突を回避するために、迅速かつ正確な通知を保証することが不可欠です。さらに、ドライバーがシステムに信頼を寄せ続けるためには、誤検知を防ぐことが重要です。
駐車支援
動作原理
駐車支援システムは、ステアリング制御を引き継いだり、縦列駐車、垂直駐車、斜め駐車の状況で視覚的な合図を提供したりすることで、運転手を支援します。
部品とサブシステム
- センサ: 車の周囲全体に配置された超音波センサとカメラが連携して距離を測定し、障害物を識別します。
- 制御アルゴリズム: これらのプログラムはセンサデータを分析して、ステアリングや動きに関する提案を生成したり、駐車中に車を自動で操作したりします。
- ディスプレイシステム: 予想される駐車軌道と車の周囲の環境を視覚的に表示します。
安全性とヒューマンファクタ
駐車支援技術の有効性は、ユーザーの信頼に大きく依存します。限られたスペースで衝突を起こさずに操縦できるシステムの能力は、運転手に信頼されるに違いありません。さらに、テクノロジーが駐車に役立つとしても、運転手は依然として注意を払い、車のセキュリティに責任を負う必要があります。
要するに、ADASテクノロジーの進歩に伴い、運転体験は主に手動のタスクから、運転手とインテリジェントシステムが連携して動作するタスクへと変化します。テクノロジーと人間の変数を複雑かつ革新的な方法で統合するこれらの「その他」の特性は、本来受けるべき注目を集めないかもしれませんが、この新しい運転の時代を定義する上で同様に重要です。
アカウントにログイン
新しいアカウントを作成