


ADCの消費電力入門
A/Dコンバータ (ADC) の消費電力は、電子機器の普及と携帯性とエネルギー効率の要求の高まりにより、今最も重要なものになっています。このセクションでは、消費電力の重要性を説明し、ADCの消費電力に影響を与えるさまざまな要因について見てみます。
消費電力の関連性
バッテリー寿命: スマートフォンやウェアラブル機器、IoTセンサなどの携帯電子機器にとって、バッテリー寿命の延長は不可欠です。ADCの消費電力はバッテリー寿命に直接影響するため、最小限に抑えることが重要です。
熱放散: 時間の経過とともに、使用された電気は熱として消費されます。ADCが高速または高密度設計で動作するシステムでは、サーマルスロットリングや損傷を防ぐために、発生する熱の管理が不可欠です。
システム効率: ADCの消費電力は、組み込みシステムやリモートセンサなど、電力予算が制限されているシステムの全体的な効率に影響を与えます。ADCは、電力予算の範囲内にとどまり、必要な性能を維持しながら変換作業を実行する必要があります。
グリーンコンピューティング: エネルギー使用とそれが環境に与える影響への関心が高まっているため、電力使用量の削減は、より環境に優しく持続可能なコンピューティング方法を採用するためのより大きな努力の一環でもあります。
ADCの消費電力のソース
スイッチングアクティビティ: ADCのスイッチング動作はエネルギー消費の主要な要因の1つです。ADC内部のトランジスタは状態が変わるたびにエネルギーを消費します。ADCの動作周波数が高くなるとスイッチングが増加し、電力使用量が増加します。
静的電流: トランジスタがスイッチングしていない場合でも、リーク電流は回路を流れ続けます。フィーチャーサイズが小さくなるにつれて、最新のCMOSテクノロジーでは、リーク電流が消費電力の重要な部分を占めるようになりました。
入力ドライバとバッファ: 特に入力インピーダンスが低い場合、入力信号をADCに駆動するためにバッファと入力ドライバが必要です。ADC入力を駆動するバッファも多くのエネルギーを消費する可能性があります。
基準電圧の生成: 多くのADCは安定した基準電圧を生成する必要があります。この基準電圧を生成するために電力を使用する追加回路が必要になることがよくあります。
デジタル回路: ADCのカウンタ、論理ゲート、レジスタはすべて電力を必要とするデジタル部品です。スイッチング関連の動的電力とリーク電流関連の静的電力の両方が含まれます。
出力ドライバ: ADC出力ドライバはエネルギーを使用し、特に複数のビットが同時に押されるパラレル出力インタフェースではエネルギーを使用します。これらのドライバはデジタル出力を処理チェーンの次の段階に送ります。
スタンバイモード
ADCの場合、携帯機器の性能を向上させ、バッテリー寿命を延ばすために電力管理が極めて重要です。スタンバイモードの使用は、最も効率的な電力管理戦略の1つです。ここでは、スタンバイモードの基本的な考え方と、それがどのように省電力を支援するか、このモードを開始および終了する方法、およびいくつかの代表的な使用シナリオについて説明します。
スタンバイモードの基本概念
ADCは、活発に変換を実行していないときの低電力状態であるスタンバイモードに入ることができます。このモードでは、ADCは構成と設定を維持しながら、特定の内部回路と機能をオフにすることで消費電力を大幅に削減します。ADCが必要なときに迅速にウェイクアップできるようにするため、コアロジックは頻繁に電力を供給されますが、電力レベルは大幅に低下します。
スタンバイモードでの省電力
スタンバイモードでの省電力は、次の方法で実現されます。
クロックゲーティング: ADCの必須ではない部品へのクロック信号を制限または非アクティブ化することにより、スイッチング動作が低減され、電力が節約されます。
電圧スケーリング: 一部のADC部品への供給電圧を下げることにより、二次的な電力を節約することができます。
入力バッファと出力ドライバの無効化: 入力バッファと出力ドライバはどちらも大量の電力を消費する可能性があります。電力は、それらを無効にするか、ハイインピーダンス状態にすることによって節約することができます。
リーク電流の低減: スタンバイモードでは、一部のトランジスタはリーク電流を低減する方法でセットアップすることができます。
スタンバイモードの開始と終了
システムはADCをスタンバイモードに切り替える内部ロジックをアクティブにするために、ADC内の制御レジスタに特定のパターンを頻繁に書き込みます。前述したように、これは一般的に様々な内部クロックを無効にし、電圧を下げ、特定の機能ブロックをオフにすることを伴います。
スタンバイモードを終了するために制御レジスタに異なるパターンを書き込む必要があることが多いですが、外部トリガや割り込みによって自動的に実行することもできます。ADCは構成が保存されているため、通常は迅速に機能を再開できますが、内部電圧とクロックを正常化するために、短時間のウェイクアップ期間が頻繁に必要になります。
スタンバイモードの使用例
バッテリー駆動機器: ウェアラブルヘルスモニターなどのバッテリー駆動デバイスでは、バッテリー寿命を維持することが重要です。測定が不要な場合、ADCはスタンバイモードのままで、定期的なサンプルを取るためにのみウェイクアップすることができます。
熱管理: 温度制限のあるシステムでは、アイドル時にスタンバイモードを使用すると、放熱を調整するのに役立ちます。
組込みシステムでの電力予算: 使用していないときにADCのスタンバイモードを慎重に使用すると、電源リソースが多数の部品間で共有されている組み込みシステムにおいて、他のシステム部品のための電源リソースを解放するのに役立ちます。
リモートセンシングアプリケーション: メンテナンスなしで長時間稼働することが期待されるリモートセンシングアプリケーションでは、スタンバイモードによる省電力化が不可欠です。
パワーダウンモード
ADCの電源管理は、特に消費電力をより長い時間最小に保つ必要があるシステムでは、パワーダウンモードなしでは完全ではありません。本セクションでは、パワーダウンモードの背後にある基本的な考え方を探り、スタンバイモードと比較しパワーダウンモードを開始および終了する手順について説明します。
パワーダウンモードの基本概念
ADCは、電力使用量を絶対最小に抑えるために、パワーダウンモード (ディープスリープモードとも呼ばれる) になります。このモードでは、ADCの内部回路と動作 (クロックとバイアス電流を含む) は完全に無効になります。ADCが長い間変換を実行することが予想されずに、節電が最も重要な場合は、通常パワーダウンモードが採用されます。
パワーダウンモードとスタンバイモードの違い
パワーダウンモードとスタンバイモードはどちらも節電に使用されますが、いくつかの重要な点で大きく異なります。
消費電力: パワーダウンモードは、スタンバイモードよりも多くのエネルギーを消費します。ほとんどすべての内部回路はパワーダウンモードでシャットダウンされますが、一部はスタンバイモードで部分的にしか電力が供給されません。
ウェイクアップ時間: スタンバイモードと比較して、パワーダウンモードではADCの内部回路をより徹底的にシャットダウンする必要があり、その結果、通常はウェイクアップ時間がより長くなります。
状態の保持: スタンバイモードでは、ADCはその構成と設定を維持し、それらが保持されることを保証します。ただし、パワーダウンモードでは、構成が失われる可能性があり、ADCがこの状態からウェイクアップしたときに再構成が必要になります。
使用事例: パワーダウンモードは、短時間の再起動が必要とされ頻繁に使用されるスタンバイモードとは対照的に、最小の消費電力が主な問題である長時間の非アクティブ状態で使用されます。
パワーダウンモードの開始と終了
通常、ADC内の制御レジスタに特定の値を書き込むことは、パワーダウンモードに入るために必要です。これにより、ADCは内部クロック、バイアス電流、およびその他の機能の使用を停止するよう促されます。一部のADCの多数のパワーダウンモードでは、異なるレベルの節電が可能です。
パワーダウンモードを終了するには、ディセーブルにした機能を再度イネーブルにする必要があります。これは制御レジスタに特定の値を書き込むか、状況によっては外部トリガや割り込みを使うことで実現できます。パワーダウンモードから復帰する際には、ADCの内部回路が安定するのに十分な時間を確保することが不可欠です。さらに、パワーダウンモードでADCの構成が失われた場合は、再構成が必要です。
ピーク電力と平均電力
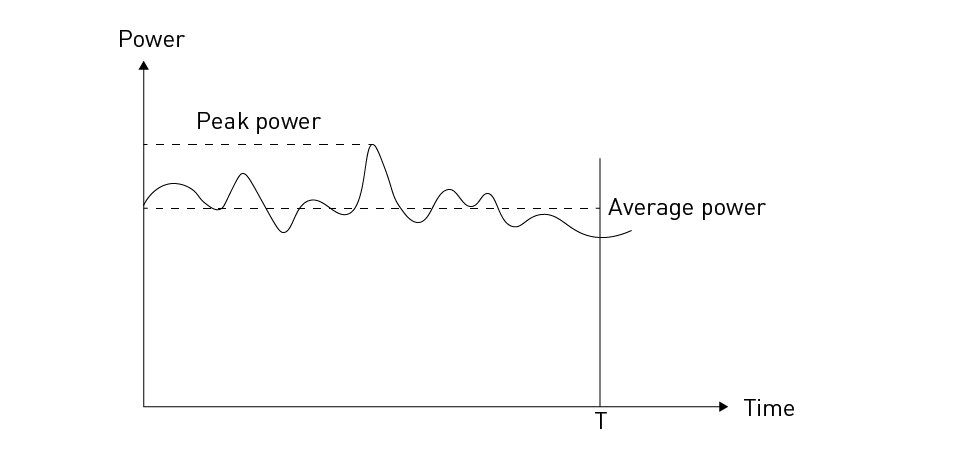
図6 : ピーク電力と平均電力
ピーク電力と平均電力の考え方は、ADCの電力制御に不可欠です。どちらもADCが消費するエネルギーについて様々な視点を提供し、性能、効率、またはその組み合わせに最適化されたシステムを設計するのに役立ちます。ピーク電力と平均電力の定義、およびそれらの変動、管理、およびモニタリングについて、このセクションで説明します。
定義と相違点
ピーク出力: ADCが動作中に使用できる最大電力量はピーク電力と呼ばれます。これは通常、ADCが最大のサンプルレートで処理しているときや、最初に起動しているときなど、多くの処理が行われているときに発生します。ピーク電力はシステムの電源と熱管理を設計するために重要です。なぜなら、電力供給およびシステムで発生した熱を放散する能力の両方で、必要なピーク電力を中断することなく供給できる必要があるからです。
平均電力: ADCの一定時間での代表的な消費電力は平均電力と呼ばれます。ADCのアクティブ状態とアイドル状態の両方から成ります。平均電力は、平均エネルギー使用量によってバッテリーの寿命が決定されるバッテリー駆動システムにおいて特に重要です。
時間枠がピーク電力と平均電力の主な違いです。ピーク電力は、ADCがフル容量で動作しているときに測定される瞬間的な測定値です。一方、平均電力とは、ADCの完全な動作サイクルを考慮して、長期間にわたる消費電力の測定のことを指します。これには、ADCが意図した機能を実行しているときのアクティブ状態と、データをアクティブに処理していないときのアイドル状態の両方が含まれます。
ピーク電力と平均電力のモニタリングと管理
モニタリング:
ピーク電力: ピーク電力はオシロスコープまたは高速データ収集システムを使用して観察することができます。ADCが動作しているときは、電源レールを観察して、電力使用量がピークになるタイミングを決定することができます。
平均電力: 指定された時間の平均電力を追跡するために、電力計または積分電力分析器を使用することができます。平均電力を計算するために、期間中に使用されたエネルギーの総量を測定し、時間で割ります。
管理:
ピーク時の電力管理: このプロセスでは、システムがADCの最も高い電力要件を処理できることを確認する必要があります。電流制限回路を組み込んだり、十分な容量の電源を使用したり、熱管理のためにアクティブ冷却システムを使用したりするなどが、これを実現する方法のいくつかの例です。
平均電力管理: 平均電力を管理するには、ADCのデューティサイクルを最大化する必要があります。ADCのサンプリングレートと消費電力は、ダイナミックパワースケーリングのような技術を使用して、システムの要求に基づいてリアルタイムで変更することができます。アイドル時間中、スタンバイやパワーダウンなどの低電力モードを使用することで、平均電力使用量を最小限に抑えることができます。
ダイナミックパワースケーリング
A/Dコンバータ (ADC) の電源管理戦略には、ダイナミックパワースケーリング (DPS) が含まれている必要があります。ワークロードや動作ニーズの変化に応じて、ADCの消費電力を動的に調整する必要があります。動的電力を減少させるためのアプローチについては、主要なDPS技術であるアダプティブ電圧スケーリング (AVS) に重点を置いて、このセクションで詳しく説明します。
動的電力を低減するためのテクニック
ダイナミック電圧スケーリング (DVS): 任意の時点でのワークロードに応じて、DVSはADCの電源電圧を調整します。低動作時に電源電圧を下げることにより、消費電力を低減します。しかし、電圧を下げると達成可能な最高速度も低下する可能性があるため、これは一般的に性能の低下という犠牲を払います。
ダイナミック周波数スケーリング (DFS): DFSにはリアルタイムADCクロック周波数調整が必要です。これは、DVSのように、ワークロードの変化に反応して行われます。動作が少ないときにクロック周波数を下げることで、動的な消費電力を低減することができます。DVSとDFSを組み合わせることは、電圧を下げることで安定性を損なわずに低周波数を可能にするため、一般的になっています。
可変の分解能: いくつかのADCは様々な分解能を可能にします。分解能を下げることにより、ADCはより迅速かつ効率的に動作することができます。高精度が必要ない場合に、これは有利です。
動的構成部品の無効化: 一部のシステムでは、すべてのADC部品を常時オンにする必要がありません。ADCの非アクティブ部品は、消費電力を低減するために選択的に無効にすることができます。
アダプティブ電圧スケーリング (AVS)
ダイナミック電圧スケーリング (DVS) は、アダプティブ電圧スケーリング (AVS) に改良されました。DVSは通常、あらかじめ決められた動作周波数に接続されたあらかじめ設定された電圧レベルを使用しますが、AVSはより簡単に現在の状況に合わせられます。
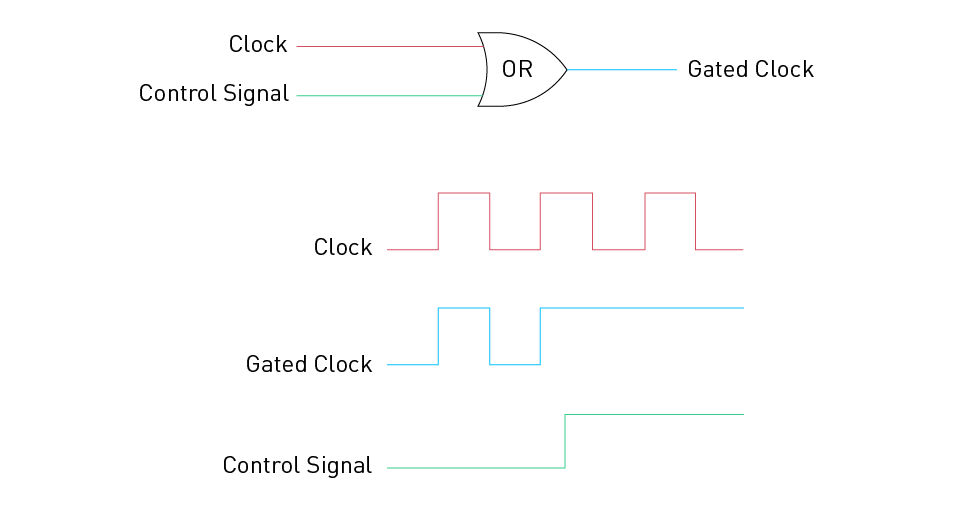
動作原理: AVSには、ADCの性能をリアルタイムでモニタリングしながら、性能のニーズを満たすために電源電圧を動的に変更する機能が含まれます。例えばAVSシステムは、ADCが処理する毎秒のサンプル数が少ない場合、電力を節約するために電圧を下げることができます。性能目標に到達することを保証するために、ワークロードが高いときに電圧を上げることができます。 利点: AVSは従来のDVSよりも正確な電圧レベル制御を可能にするので、より効果的であるかもしれません。ワークロードや温度の変動に対応し、消費電力を継続的に最適化できます。 実装: AVSを使用するためには、プログラム可能な出力を備えた電圧レギュレータや性能センサなどの追加部品が一般的に必要になります。さらに、電圧調整の選択はハードウェアやソフトウェアで実装できる制御アルゴリズムを使用して行われます。 ADCの設計には、電力使用量を最小限に抑え、性能基準を満たすことを保証するために不可欠な電力管理が含まれている必要があります。クロックゲーティング、パワーゲーティング、およびダイナミック周波数スケーリングは、このセクションで説明する3つの主要な電力管理戦略です。 定義: クロックゲーティングは、ADC回路の非アクティブ部分へのクロック信号を選択的にオフにすることで、ADC回路のダイナミック消費電力を低減する技術です。動的消費電力はクロック周波数に関連しているため、一部の回路部品ではクロックを遮断することで、それらの部品の消費電力を効果的に低減することができます。 実装: クロックゲーティングを実行するには、クロックネットワークに追加の論理ゲート (ANDまたはORゲートなど) を追加する必要があります。これらのゲートの動作、クロック信号が回路の特定の領域に到達するかどうかが決まります。 図7 : グロックゲーティング 使用事例: 同期的または常時機能する必要のない複数の処理ユニット、または部品を備えたADCは、クロックゲーティングの恩恵を最も受けます。例えば、デジタルフィルタを備えたADCでは、フィルタリングが不要な場合にクロックをフィルタに開閉することができます。 定義: パワーゲーティングは、ADC回路の未使用領域への電源をオフにすることによってリーク電力を低減する方法です。スイッチ (しばしばトランジスタ) は電源と部品の間に挿入されます。 実装: 電源が回復するまで回路を再び起動できないため、パワーゲーティングは慎重に設計する必要があります。回路をオフにする前に、リテンションレジスタのような方法で状態を保持することができ、電源スイッチは特別な制御回路で管理することができます。 使用事例: パワーゲーティングは、部品が長期間非アクティブなADCや、リーク電力が総電力使用量のかなりの部分を占める低電力アプリケーションで特に役に立ちます。 定義: ワークロードのニーズに応じて、ダイナミック周波数スケーリング (DFS) はADCの動作周波数をリアルタイムで修正します。これは動的な消費電力を下げることに非常に成功しています。 実装: クロック生成回路における位相ロックループ (PLL) の使用または分圧器値の変更は、DFSを行実装するために使用できます。最新のADCには、DFSを容易にするモジュールが含まれている可能性があります。 使用事例: DFSは、サンプルレートが動的に変化するセンサデータ収集システムのように、ADCの負荷が時間とともに変化する状況で有利です。電力管理のテクニック
クロックゲーティング
パワーゲーティング
ダイナミック周波数スケーリング
アカウントにログイン
新しいアカウントを作成