AN131 - センサの位置バイアス角度を設定する方法

役立つ情報を毎月お届けします
プライバシーを尊重します
はじめに
MP6570は、高精度の角度センサが集積されたFOCコントローラです。回転子の位置を検出するには、モータのシャフトに磁石を取り付ける必要があります (図1を参照) 。MP6570は、面内磁場成分を検出して回転子位置を取得します。MP6570に組み込まれている磁気角度センサは、絶対回転子位置センサとして機能します。FOC(フィールド指向制御)アルゴリズムでは、パーク変換と逆パーク変換に電気角度を使用する必要があります。したがって、回転子がフェーズAと整列しているときのセンサ位置バイアス角度を最初に設定する必要があります。
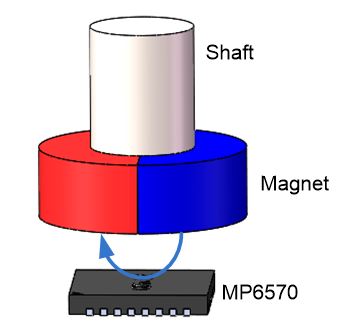
図1:MP6570が回転子の位置を感知する方法
センサ角度から電気角度を取得する
三相PMSM / BLDCモータは、固定子と回転子の2つの部分で構成されています。
固定子は、固定子コアに巻かれた3つの巻線で構成されています。三相の巻線は、120°の法則により別々に配置されます。三相巻線に交流電流が流れると、空間内に円形の回転磁場 (Fs) が発生し、その回転数は交流電流の周波数と同じになります。
回転子は、一定の回転子磁場 (Fr) を提供するために、1対または複数の永久磁極のペアで構成されています。
定常運転では、Frは同じ回転速度で固定子の磁気Fsに従います。回転子磁場Frの軸上に立って固定子磁気Fsを見ると、固定子磁気FsはDC成分になります。これは、制御を容易にするために、三相ACコンポーネントを2相DCコンポーネントに切り替えて適切な座標変換を見つけることができることを意味します。d 軸 (回転子磁束軸) 成分とq軸 (90°先行d 軸) 成分と呼ばれる2相DC成分は、別々に分離して制御することができます。これは、フィールド指向制御 (FOC) と呼ばれます。通常、d 軸電流 IDはゼロであるため、固定子磁束は回転子磁束と垂直になり、効率が向上し、トルクが大きくなります。
回転子磁束d 軸とフェーズA軸の間の角度シータがわかっている場合、3から2への変換を簡単に行うことができます (図2を参照) 。回転子磁束と固定子位相ベクトルAの間の角度は、電気角度として定義されます。
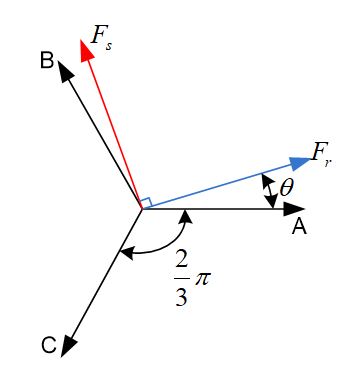
図2:電気的角度
製造中、磁石は、回転子極と磁極の位置合わせの間に固定された関係なしに、モータシャフトに任意に取り付けることができます。モータのセットが異なると、MP6570角度センサから得られる角度は、回転子の電気的角度と多少のオフセットが異なります (図3を参照) 。
MP6570を使用してシータバイアスを見つける
モータ巻線Aに正の電流がある場合、ベクトルはA+として表示されます。電流が負の場合、ベクトルはA-として表示されます。図4は、6つの基本ベクトルを含む空間ベクトル図を示しています。
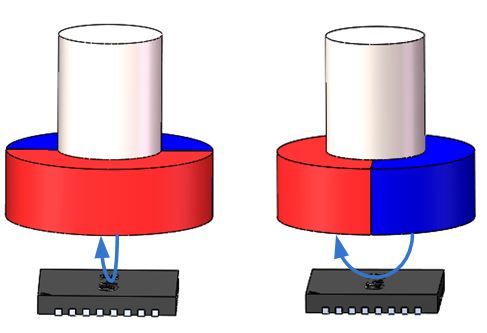
図3:異なるモータへの磁石の取り付け
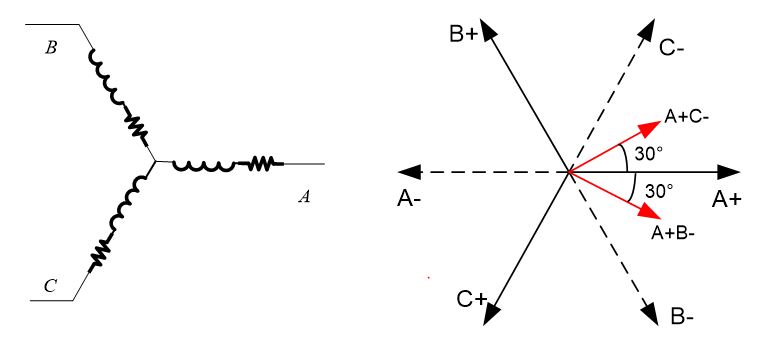
図4:スター接続モータでシータバイアスを見つける
電気角がゼロのときの位置を取得するには、モータ巻線Aに電流を流す必要があります。ただし、実際のモータでは、相巻線Aだけに電流を流す方法はありません。電流は、相巻線BまたはCのいずれかを介して流れる必要があります。A+ B-とA + C-のベクトル和もベクトルAと整列します。図5は、MP6570で初期シータバイアスを取得する方法を示しています。
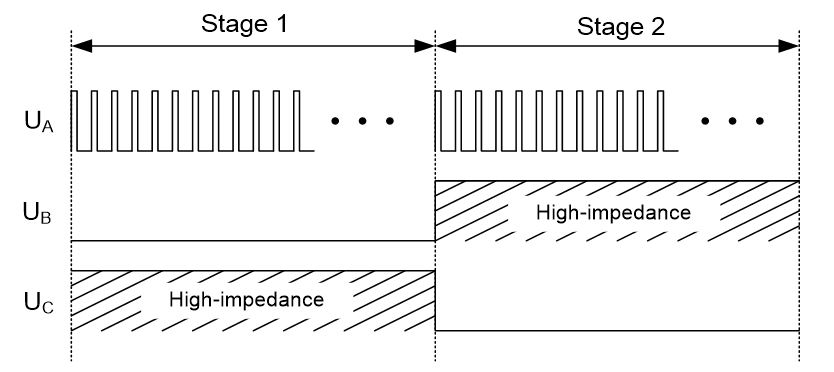
図5:オートシータバイアス期間中のスイッチングロジック
ステージ1の間、フェーズAがスイッチングし、フェーズBのローサイドスイッチがオンになり、フェーズCが高インピーダンスになります。回転子はA+B-ベクトル位置に位置合わせされます。ステージ2では、フェーズAがスイッチングし、フェーズBが高インピーダンスになり、フェーズCのローサイドスイッチがオンになります。回転子はA+C-ベクトル位置に位置合わせされます。異なるフェーズAのデューティサイクルと時間間隔を設定することにより、使用するモータの特性に一致するように回転子を調整するトルク電流を制御できます。この操作は、対応するレジスタにデューティと時間間隔を設定することで自動的に実行できます。これは、このガイドに従うか、MPSによって開発されたGUIソフトウェアであるeMotion VirtualBenchを使用することで簡単に実行できます。
スターおよびデルタ接続モータ
三相BLDC / PMSMモータの固定子巻線は3つのコイルで構成されています。スターとデルタの2つの一般的な電気巻線構成があります。スター構成はすべての巻線を中心点に接続し、電力は各巻線の残りの端に適用されます (図6aを参照) 。デルタ構成は三角形の回路で3つの巻線を相互に接続し、電力はそれぞれに適用されます。接続 (図6を参照) 。
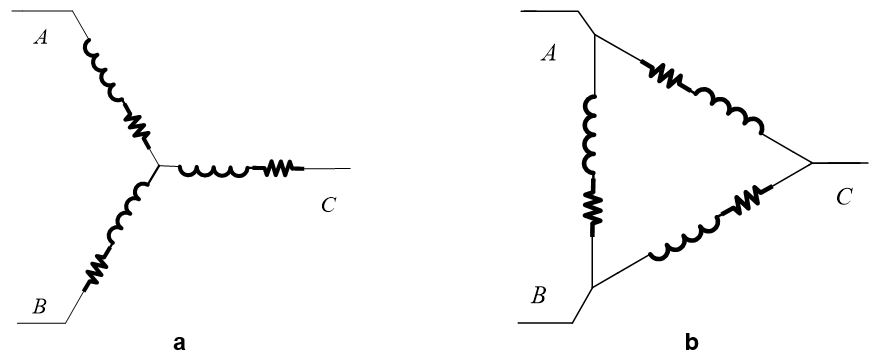
図6:スターおよびデルタ接続回路
MP6570は、シータバイアスを見つけるために同じ位置合わせ方法を使用して、スター接続モータとデルタ接続モータの両方で使用できます。
設計まとめ
回転子がフェーズAに位置合わせされている場合、FOC制御を操作するには、シータバイアスと呼ばれるセンサ角度を最初に見つける必要があります。これは、このガイドに従うか、eMotion仮想ベンチを使用することで簡単に実行できます。
MP6570は、デルタ接続されたモータで使用できます。シータバイアスを変更する必要はありません。
_______________________
興味のある内容でしたか? お役に立つ情報をメールでお届けします。今すぐ登録を!
アカウントにログイン
新しいアカウントを作成