MPS Open-Source Ventilator
Automated Bag Valve Mask (BVM) Resuscitator
The MPS engineering team is working on an open-source, mechanized bag valve mask (BVM) bridge ventilator to help apply its expertise in motor controls and power supply on a solution to quickly automate what is normally a manual process. We have been inspired by many other open-source projects working to battle the COVID-19 pandemic, primarily referencing the MIT E-Vent project, in our approach to come up with a working solution. MPS wants to do our part in contributing our skill and expertise, utilizing an open-source design approach to widen our potential for positive impact.
Device Functionality
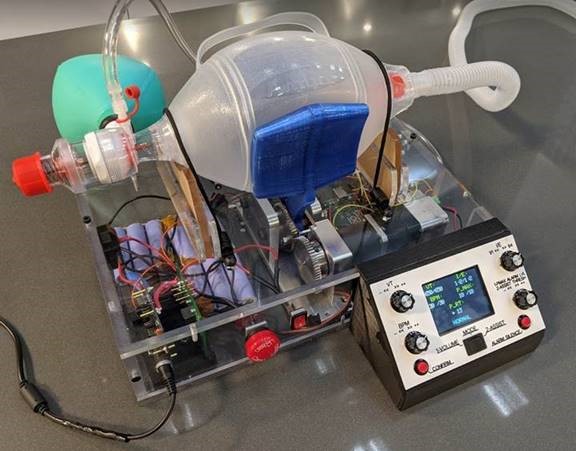
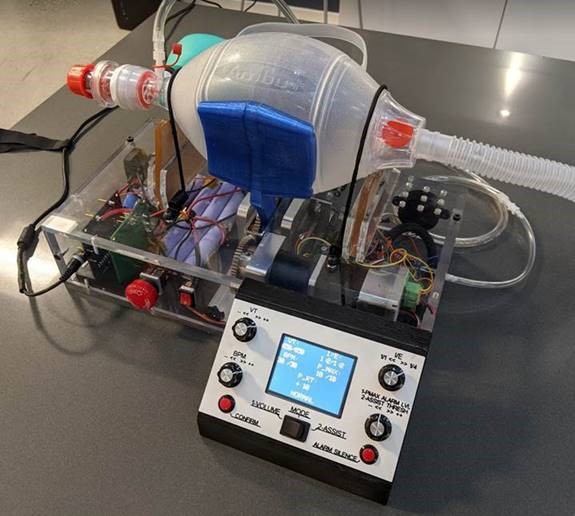
- Automates squeezing of standard bag valve mask resuscitator
- Compatible with standard BVMs and BVM accessories available in hospitals, ambulances, etc.
- BVM is easily accessible and removable if manual intervention is required
- Operational control of:
- Tidal volume (VT), target range ~200mL to 800mL
- Respiratory rate in breaths per minute (BPM), 8bpm to 40bpm
- Inspiratory/expiratory (I/E) time ratio, 1:1 to 1:4
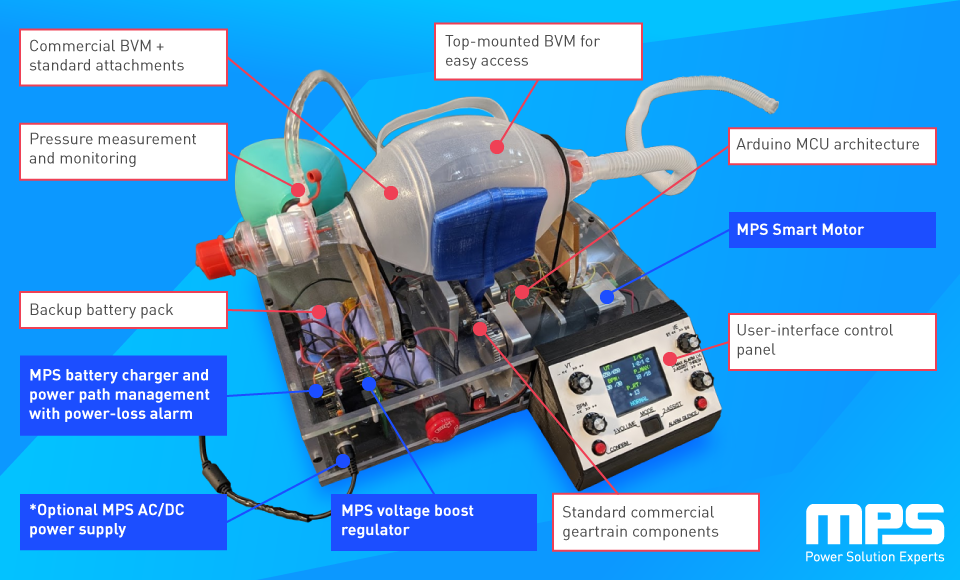
- Pressure measurement and monitoring:
- Maximum inspiratory (PIP), plateau, and PEEP pressures
- Safety features:
- Failsafe to allow manual usage of BVM in case of system failure (E-stop power disconnect and back-driveable mechanism)
- Audible alarms for main power loss and pressure events (pressure loss, exceed peak pressure, etc.)
- Battery backup
- Confirmation button to implement any setpoint changes
Video Overview
Video Update 4/17/2020
Video Case Study
Design Benefits
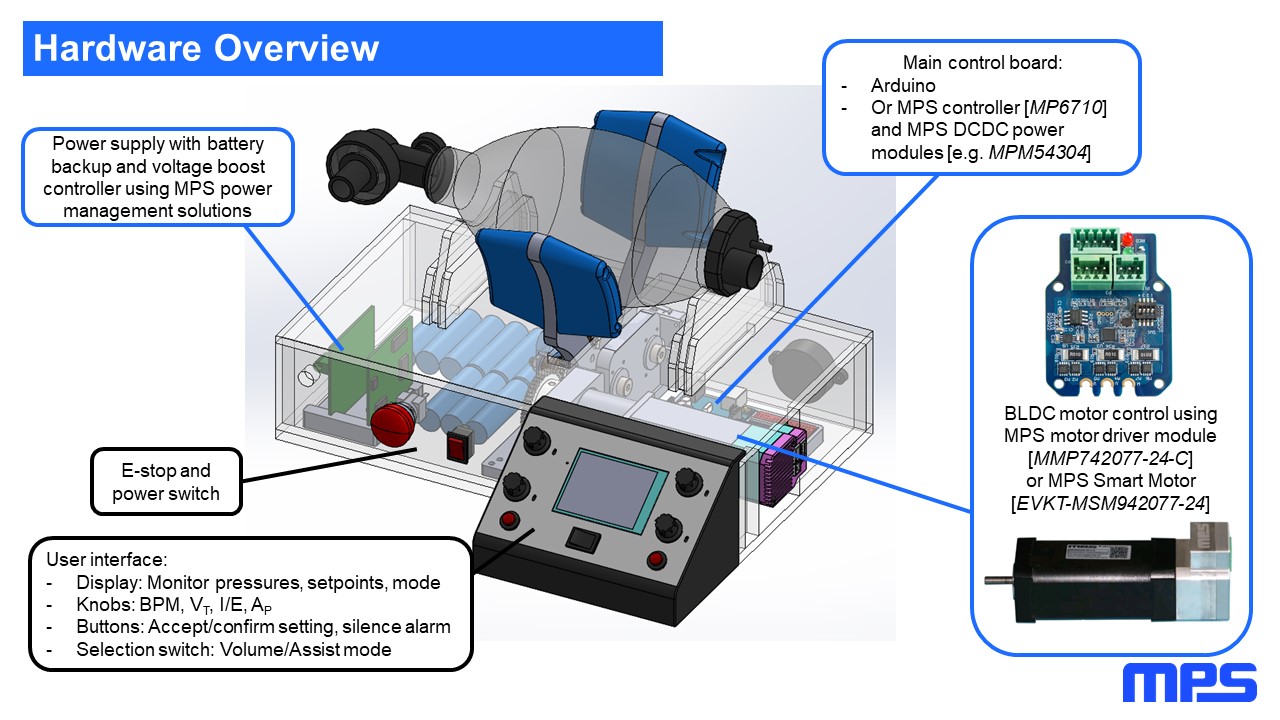
- Dedicated charger IC with power path manages the battery pack, providing the following advantages:
- About 60 minutes without AC power
- Keeps the battery pack fully charged when AC power is present
- Provides seamless transition from AC to battery, enabling continuous operation in loss-of-power event
- Ensures that the charging profile is compliant with the battery pack's safe operating region
- Enables reduced component count and increased efficiency by integrating all switching FETs
- Motor system
- All-in-one, integrated position sensor, driver power stage and FOC control engine
- Simplified motor control programming with GUI
- 30% smaller
- Very efficient, allowing 60-minute battery runtime
- Simple mechanical design combination of machined, 3D-printed, 2D-cut, and commercial drivetrain components
- Standard MPS components:
- Power Supply details
- Battery Backup, BMS
- Internal Power System
- Motor & Motor Controller system details
- Device qualification and usage recommendations from medical professionals
- Electronics manufacturing services (EMS) or contract manufacturing (CM) partners with medical regulatory and manufacturing expertise
- Component suppliers
- MPS Design Documentation Files
- System Block Diagram
- MIT Emergency Ventilator (E-Vent) Open Source Project
|
|
 |
|
Status Update 6/15/2020
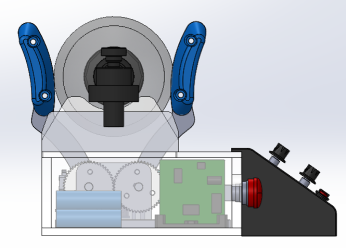
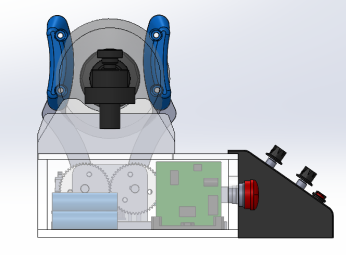
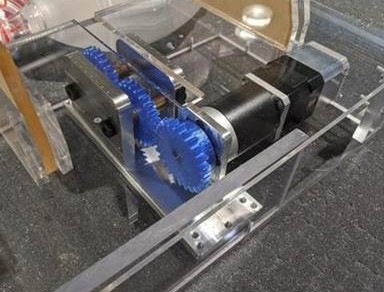
- We have made our control code files available for download with an updated file set on our design documentation page. Also included in this new file set are updated CAD models and parts lists to capture a gearing change we’ve made. Coming out of our latest testing, we felt adding a deeper gear reduction was appropriate to gain additional torque capability for squeezing the BVM and put our motor in its optimum power range (we changed from 1:1 spur gears to 2:1, making the total reduction including the gearbox 200:1). All updated files have been tagged with a “200615” suffix to highlight them.
Status Update 5/04/2020
- We have prepared supporting documentation for our design and made them available for download. Included are operational and build notes, high level circuit diagram, commercial and fabricated parts BOMs and 3D CAD files. We have not uploaded our control code yet as we are still working on some bugs and cleaning up the code so it will be suitable for release.
Status Update 4/17/2020
- Audible alarm has been integrated for power loss, and works well. Code for other alarm functions is in progress
- The squeeze arm homing routine has been implemented. We are using the current-detection function of the smart motor to do this instead of a separate limit switch. When the program starts up, the arms open slowly until they hit the edge of the enclosure, which is then triggered as the home reference position
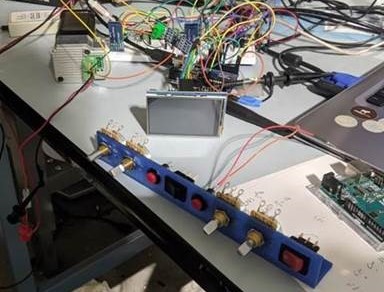
- Wiring and peripheral components have been consolidated into a tighter package that fits entirely inside the enclosure, and the control inputs have been installed on the control box
- We have connected the pressure sensor to the BVM. The display shows real-time pressure values for now, and we will work on some kind of algorithm to enable detecting and displaying the specific pressure values needed in each cycle (peak, plateau, and PEEP)
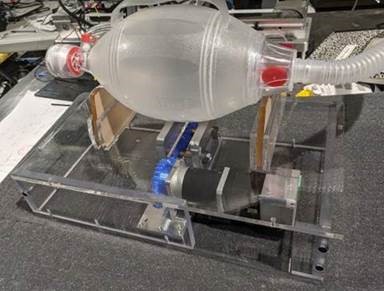
- Added a simple elastic retaining strap to help keep the BVM in a consistent position
 |
 |
Next Steps
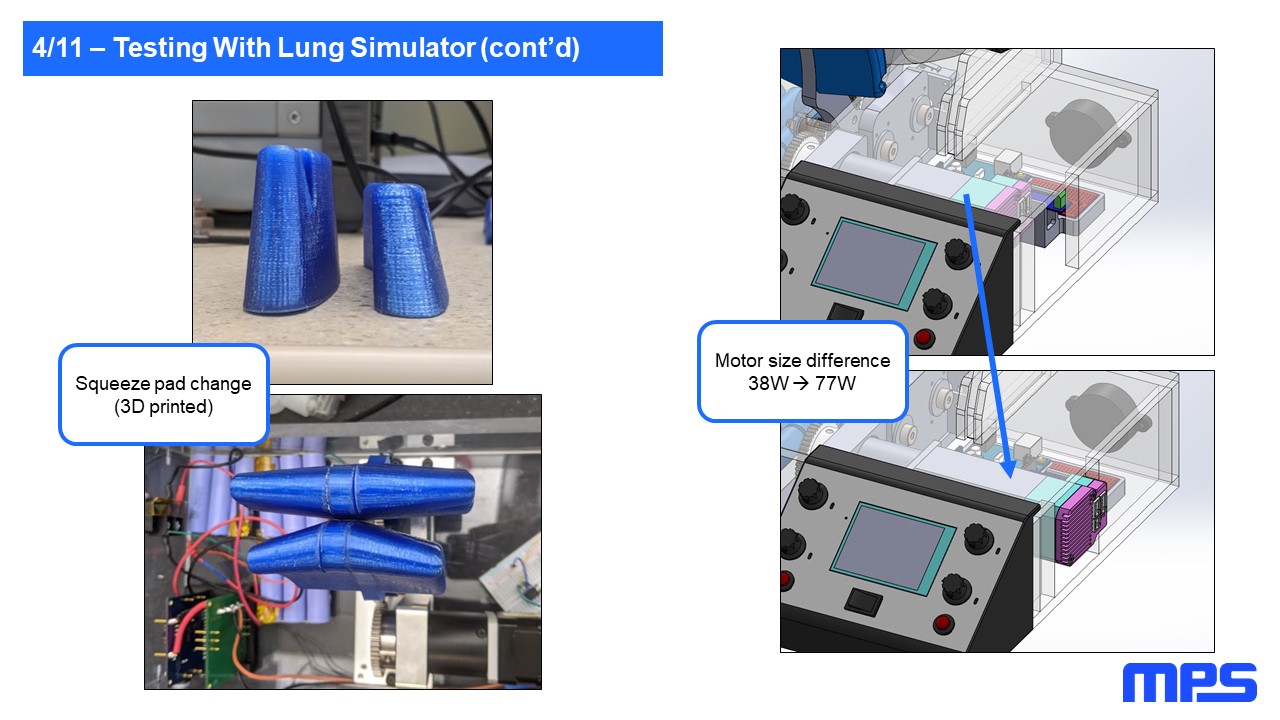
- Install 77W smart motor to replace the initial 38W motor used
- Implement pressure monitoring functions
- Implement additional alarm functions
- Investigate additional features needed for meeting FDA/EUA/WHO requirements
- Compile design documentation for this version of the prototype to prepare for uploading to our website (commercial parts BOM, mechanical models and build notes, high-level circuit diagrams, and Arduino code)
Status Update 4/11/2020

Status Update 4/10/2020
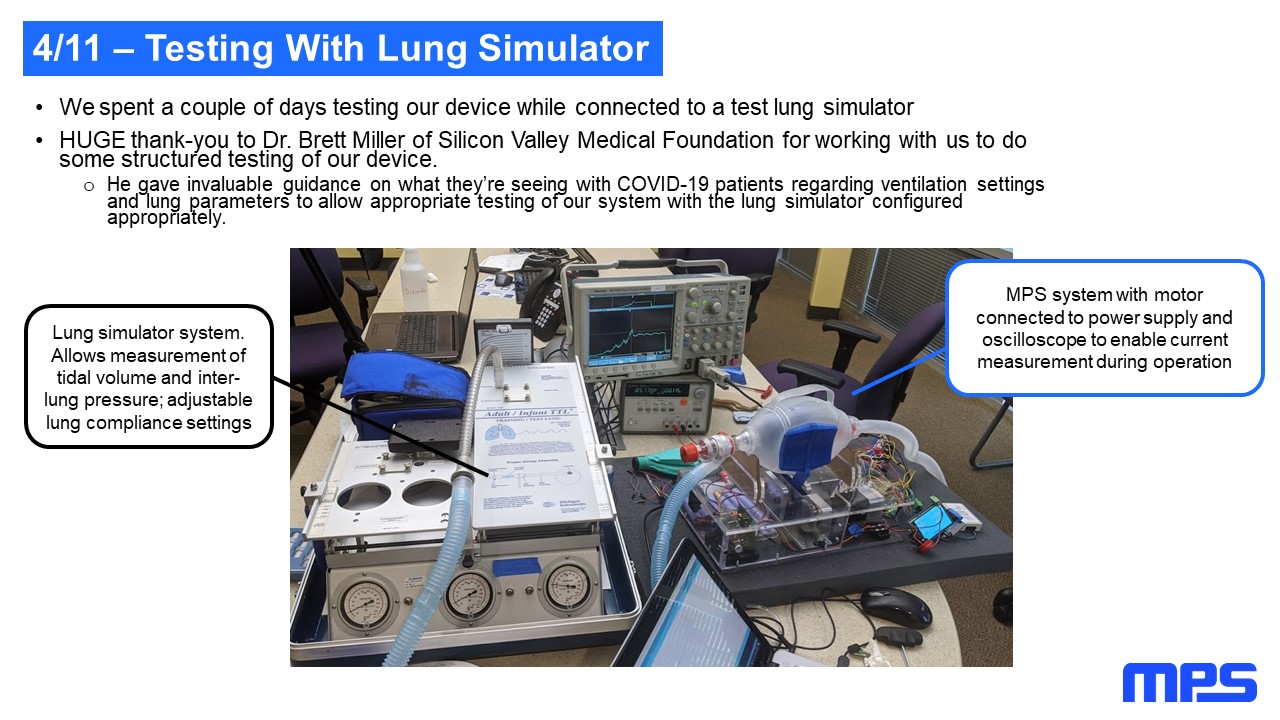
- Reviewed design and performance using a lung simulator test machine with guidance from a doctor. Tested tidal volume and motor torque limits
- Updating arm design to increase volume delivery under max conditions of lung stiffness and pressure requirments
- Verifying peak motor requirements
- Next steps:
- Update arm design
- Integrate the arm position homing/start-up routine, limit switch has been installed
- Locate/procure additional fittings/tubing to optimize the airflow and pressure measurement circuit in accordance with the doctor’s recommendations
- Clean up wiring/aesthetic of the system (integrate e-stop to both power circuits, move knobs and display to the nicer integrated control panel, etc.)
- Implement additional alarm functionality
- Calibrate and test pressure sensor with pressure display and alarms
Status Update 4/8/2020
- Mechanical features functional for tidal volume, BPM and I/E adjustments
- Integrated MPS power management hardware to run system independent of lab power supplies, including battery backup if there is a loss in main input power
- Working on pressure monitoring integration and main arm homing routine
- Machined parts are done except for the squeezing arms. The plastic housing is assembled and the motor is mounted with 3D-printed gears
- The bag supports are interchangeable and we have a few sets so the bag position can be raised and lowered. We also plan to add attachment for a simple elastic band to keep the bag in place if needed
- All the electrical parts for the control side are complete, and we are continuing to push on getting to that first functional test
 |
 |
 |
Log in to your account
Create New Account