DC Motors: Operating Phases, Fault Detection and Protection, and DC Motor Driver Applications

Get valuable resources straight to your inbox - sent out once per month
We value your privacy
Introduction
This article provides an overview of direct current (DC) motors. In particular, it will describe the electrical parameters for DC motors operating under three different operating phases, abnormal operating conditions, and common applications for DC motors, including security cameras, electronic smart locks, and solenoid drivers.
Definition of a DC Motor
A DC motor is a device that converts electrical energy into mechanical energy, where the electrical parameters change with the operating state. Consider regular operation; there are three operating phases during which the electrical parameters change most drastically, with values that may be several times higher than those during steady-state operation. These three operating phases are described below:
- Start-up:In this phase, the starting current significantly exceeds the motor’s rated operating current due to the motor’s small back electromotive force (EMF).
- Braking:When a motor brakes, an opposing rotational force is applied to the DC motor to stop the original rotation. In this phase, the changes in motor current and voltage may vary depending on the braking methods used. If the commonly used short-circuit braking method is used, a large short-term braking current is generated, which can result in significant power dissipation in the internal motor winding and the motor’s driving circuit.
- Reversal:When the motor’s voltage reverses, the motor is forced to rotate in the opposite direction. The operating conditions are the most extreme in this phase, meaning that the motor experiences the largest changes in both current and voltage during this stage. If appropriate measures are not taken, both the motor and the motor driver chip can be damaged.
Related Content
-
ARTICLE
Stepper Motors Basics: Types, Uses, and Working Principles
In this article, we will cover the basics of stepper motors.
-
WEBINAR
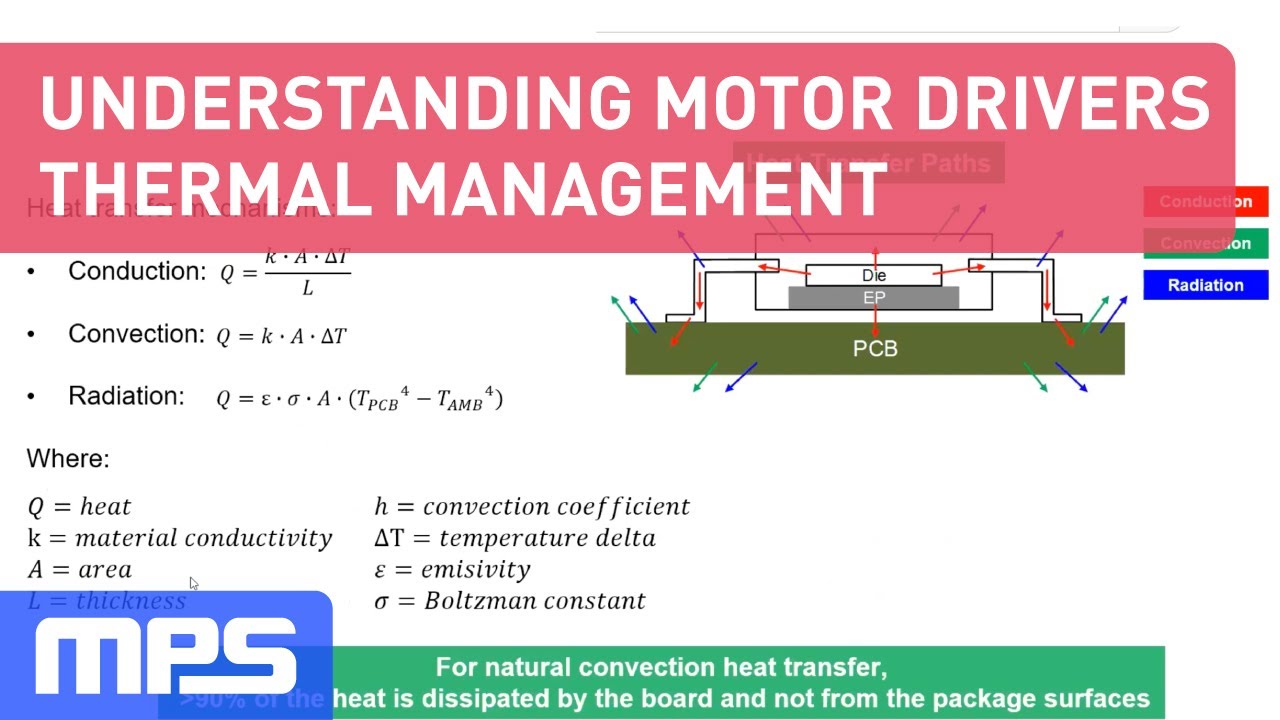
Webinar: Understanding Motor Drivers Thermal Management
In this webinar, learn about thermal transient behaviors and the theory and measurement methods to estimate thermal impedance.
-
USE CASE

Stepper Motor Driver Use Case: Manufacturing and Industrial Equipment
To optimize stepper motor drives used in manufacturing and industrial machinery, designers must consider the issue of resonance that occurs when the motor and driver signals reach the same frequency.
-
VIDEO

Highly Integrated Stepper Motor Driver: MP6602
The MP6602 is a 35V stepper motor driver from MPS that is ideally suited for robotics and industrial applications.
Abnormal Operating Conditions
Motors commonly experience a short circuit at both ends of the winding; as discussed above, this generates a large short-circuit current and heat in the motor driver chip. In addition, when the motor rapidly brakes or decelerates, the motor winding current may reversely flow into the input power supply through the motor driver chip. This increases the input voltage (VIN), and the motor essentially becomes a generator. These two abnormal operating conditions may damage the motor driver chip.
Because electrical parameters are prone to variation through the motor’s operation, it is vital to have protections in place that can protect the motor and its driver chip from damage. The motor driver chip can provide protections such as over-current protection (OCP), over-voltage protection (OVP), and over-temperature protection (OTP).
Common Applications
Direct current (DC) motors are widely used in refrigerators, automobiles, medical equipment (such as fitness monitors), aerospace, consumer electronics (such as drones and gaming controllers), and other fields. MPS provides excellent motor driver solutions with the MP6508A, MP6614, and MPQ6612A-D-AEC1, which are described in further detail.
Security Cameras
The MP6508A is an advanced motor driver that can deliver a motor current up to 1.2A per channel. It integrates full-bridges consisting of N-channel power MOSFETs and operates across a VIN range between 2.7V to 18V. The MP6508A can be used as a DC motor driver in security cameras to achieve reliable motor control for basic functions such as tilt, pan, and zoom.
The MP6508A’s small QFN-16 (3mmx3mm) package features an exposed thermal pad on the backside that facilitates heat dissipation. This is crucial considering that cameras need to operate in various indoor and outdoor environments.
Figure 1 shows the MP6508A’s typical application circuit.

Figure 1: MP6508A Typical Application Circuit
Electronic Smart Locks
The MP6614 is an H-bridge motor driver that can drive one DC motor, one winding of a stepper motor, or other loads. It can enable lock actuation in electronic smart locks by driving the reversible motors of the locking mechanism. The MP6614 does not require a low-ohmic shunt resistor due to its internal current-sense circuit as well as cycle-by-cycle current regulation and limiting.
Figure 2 shows the MP6614’s typical application circuit.
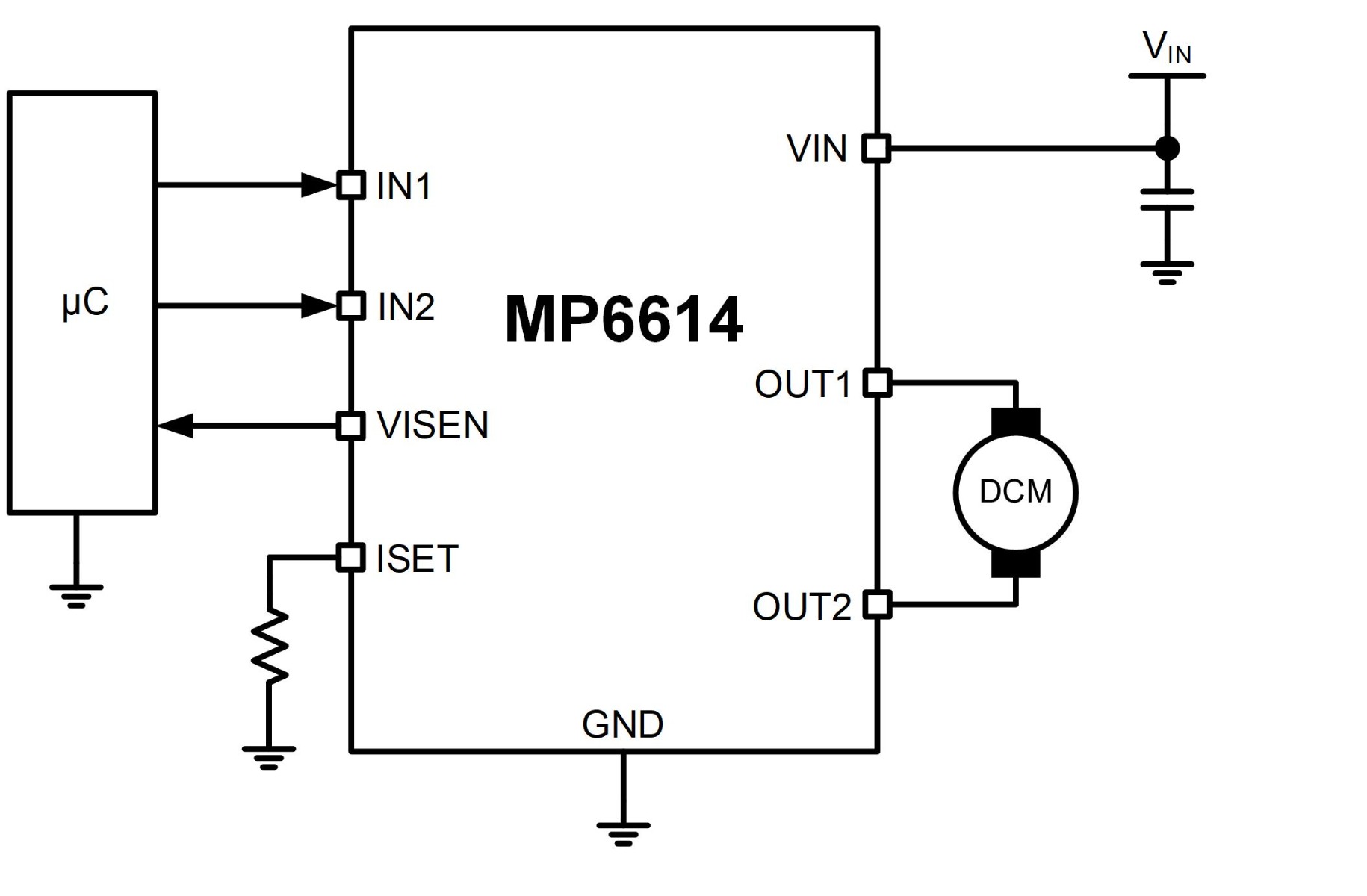
Figure 2: MP6614 Typical Application Circuit
Solenoid Drivers
The MPQ6612A-D-AEC1 is another H-bridge motor driver that can be used in solenoid drivers to provide precise control of DC motors, stepper motors, and other loads. The MPQ6612A-D-AEC1’s reversible motor driving capability enables and disables the solenoid driver by managing the input signals to the H-bridge. It can be used in infotainment systems as well as automotive displays (including navigation, heads-up, and cluster).
Figure 3 shows the MPQ6612A-D-AEC1’s typical application circuit.
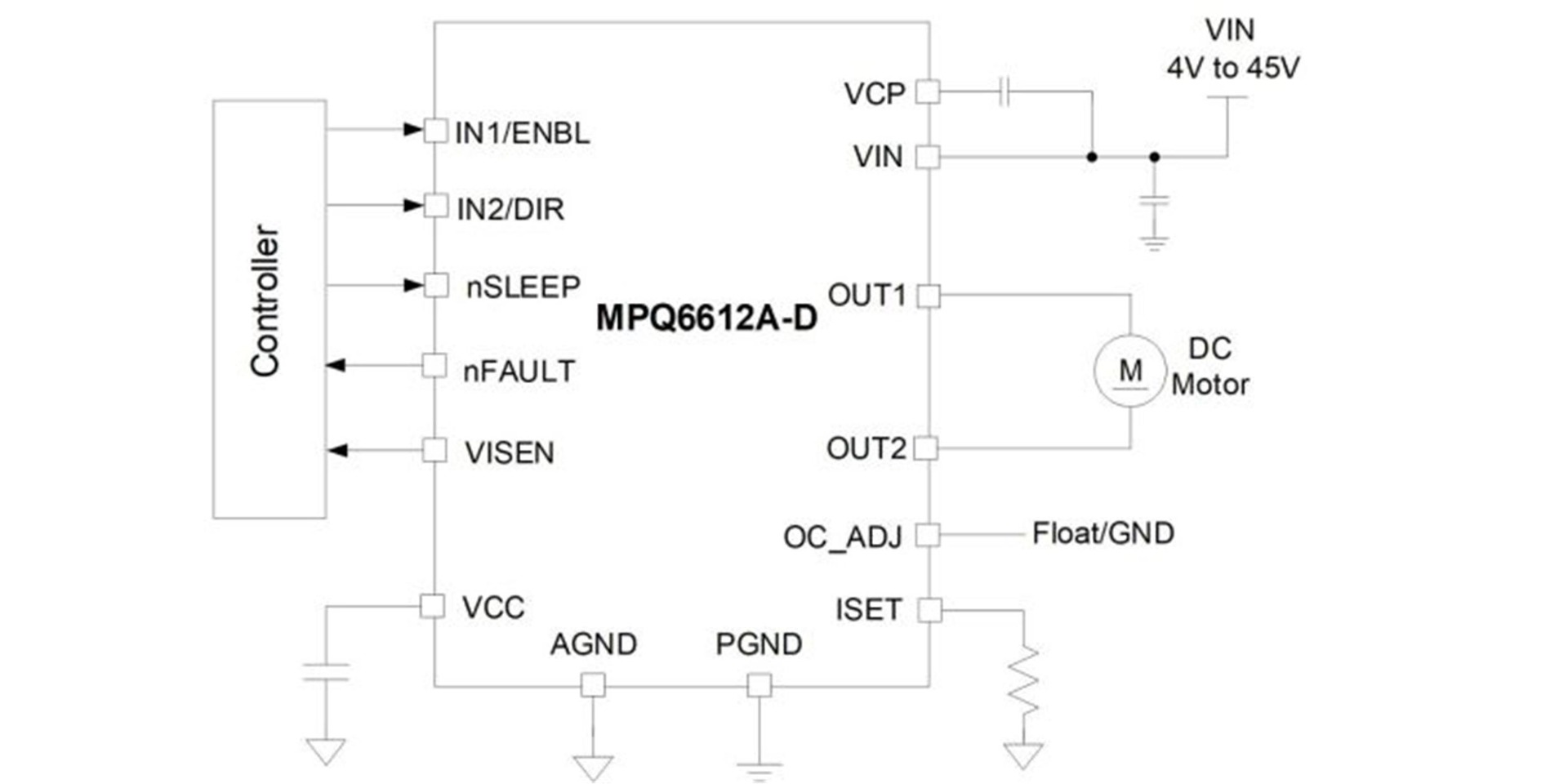
Figure 3: MPQ6612A-D-AEC1 Typical Application Circuit
Conclusion
This article reviewed the changes in electrical parameters throughout the motor’s various operating phases as well as the importance of protections against abnormal operating conditions. Then this article discussed MPS’s motor driver solutions for common applications, including security cameras, electronic smart locks, and solenoid drivers, with the MP6508A, MP6614, and MPQ6612A-D-AEC1, respectively.
For more information, refer to MPS’s broad selection of motor drivers and motor controllers. MPS provides stepper motor drivers that can be used in printers, brushed DC motor drivers that can be used in toys, and brushless DC drivers (BLDC drivers) that can be used in power tools.
_______________________
Did you find this interesting? Get valuable resources straight to your inbox - sent out once per month!
Technical Forum
 Latest activity 2 days ago
Latest activity 2 days ago
 1 Comment
Latest activity a week ago
5 Comments
Latest activity a week ago
2 Comments
1 Comment
Latest activity a week ago
5 Comments
Latest activity a week ago
2 Comments
Log in to your account
Create New Account